基于模糊神经网络空间矢量调制的直接转矩控制
2011-03-16蔡斌军
蔡斌军
(湖南工程学院应用技术学院,湘潭 411101)
基于模糊神经网络空间矢量调制的直接转矩控制
蔡斌军
(湖南工程学院应用技术学院,湘潭 411101)
为了改善基于空间矢量调制的直接转矩系统的动态性能及低速性,分析了传统SVM-DTC中采用两个PI控制器来产生参考电压矢量,存在PI控制器参数难以确定的问题,提出了一种基于模糊-神经网络空间矢量调制(SVM)的异步电机直接转矩控制(DTC)策略.阐述了产生磁链参考电压矢量的模糊控制器和产生转矩参考电压矢量的神经网络控制器的具体设计过程,同时对该控制方法在基于simulink的仿真软件和基于DSP2812控制芯片的实验装置分别进行了仿真与实验,并与传统SVMDTC进行了比较.仿真和实验结果表明,模糊-神经网络SVM-DTC控制系统动态性能好,可有效提高系统的低速性能.
直接转矩控制;空间矢量调制;模糊控制;神经网络;低速性
0 引 言
传统的直接转矩控制是借助转矩的Bang-Bang控制来实现PWM的控制策略.同时也存在开关频率不固定的问题[1][2],且不可避免会引起转矩急剧的增加或减少[3].为了解决这些问题,采用空间矢量调制(SVM)技术[4]的DTC算法极大减小输出转矩脉动,且开关频率得到固定.参考电压矢量求取是SVM的关键,普遍采用两个PI控制器来调整定子磁链和转矩,以获得参考电压矢量.实际上该方法并不能达到精确控制的效果,因为PI控制依赖于磁链和转矩的准确观测[5],特别是低速运行时,磁链和转矩的不准确观测极大的影响了PI的控制性能.目前,模糊控制在直接转矩控制系统中[6][7][8]广泛应用,显示了其鲁棒性强的优越性.因此,为了提高系统的鲁棒性和低速性能,提出了一种模糊神经网络空间矢量调制的直接转矩控制方法.
1 DTC系统的控制原理
采用空间矢量的数学分析方法,以定子磁场定向,建立在静止正交定子坐标系α-β上的数学模型如下,磁链方程:

式中:ψsα,ψsβ分别为 α-β 坐标系中定子磁链的分量;Usα,Us β分别为α-β坐标系中定子电压的分量;isα,isβ分别为α-β坐标系中定子电流的分量;Tc-电磁转矩;Rs-定子电阻;p-电机极对数;θ-磁链角.
直接转矩控制系统在低速运行时采用近似圆形的磁链轨迹,通过检测定子电压和定子电流,经坐标变换,得到电压电流,然后用式(1)~式(2)观测ψs;用式(3)观测转矩 Te,从而实现异步电机的直接转矩控制.
2 模糊神经网络SVM-DTC系统
2.1 空间矢量调制的基本原理
空间矢量调制技术利用相邻的基本电压空间矢量可以合成任意大小和方向的参考电压矢量,如图1所示.
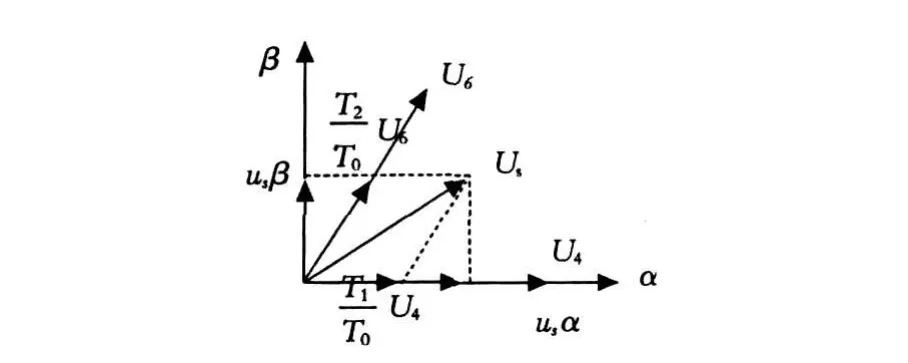
图1 合成参考电压矢量
相邻电压矢量由参考电压矢量的相位角判定.空间矢量合成的表达式为:

U1,U2为用于合成的基本电压矢量;U0为零矢量;Us为合成的参考电压矢量.且满足T0=t1+t2+t3,T0为一个控制周期.
将式(6)转换到静止坐标系的坐标轴上:

θ1和θ2分别为电压矢量U1和U2与α轴正方向的夹角.矢量作用时间根据式(5)和式(6)求取.举例说明,图1中利用相邻基本电压矢量U4和U6合成参考电压矢量Us.将 θ1=0°和 θ2=60°代入式(6)和式(7),可求得电压矢量的作用时间分别为:

2.2 模糊-神经网络SVM-DTC控制实现
传统的直接转矩控制不可避免的存在磁链和转矩误差.能够补偿磁链和转矩误差的电压矢量称为参考电压矢量.如何求得参考电压矢量是SVMDTC算法的核心问题.模糊神经网络SVM-DTC控制原理如图2所示.

图2 双模糊SVM-DTC系统方框图
从以上控制原理框图可以看出:实现系统控制性能的主要模块是转矩模糊控制器和磁链神经网络控制器;转矩误差经过转矩模糊控制器得到旋转坐标系下参考电压矢量的q轴分量,定子磁链误差经过磁链神经网络控制器得到旋转坐标系下参考电压矢量的d轴分量.得到的参考电压矢量是在旋转坐标系下的两个电压矢量分量,在将此分量送入SVM之前,先分别转换到静止的定子坐标系下,转换的关系式如式(10)所示.

式中θ为旋转坐标系与两相静止坐标系横轴的夹角.转换生成的两个在静止坐标系下的分量送入SVM模块,通过SVM模块生成控制逆变器开关状态的PWM信号,实现基于模糊-神经网络空间矢量调制的直接控制.
3 转矩模糊控制器的设计
3.1 变量的模糊化及隶属度函数
转矩模糊控制器根据转矩误差大小及其变化相应的输出参考电压矢量的q轴分量Uq定义其输入、输出变量.其输入变量有2个:转矩误差ET和转矩误差变化率Δ ET.输出变量有1个,即参考电压矢量的q轴分量Uq.ET包含5个模糊子集(NL,NS,Z,PS,PL),Δ ET有3个模糊子集(N,Z,P),Uq有5个模糊子集(NL,NS,Z,PS,PL).转矩模糊控制器的模糊变量ET、Δ ET和Uq的隶属度函数分布如图3所示.

图3 转矩控制器的模糊变量隶属度函数
3.2 模糊控制规则的建立
根据SVM-DTC系统的控制原理,直接转矩控制的思想是当转矩和磁链的误差值在滞环比较器的范围内,磁链或转矩输出为1或0,通过磁链、转矩的大小进行空间矢量的选择,从而实现转矩的直接控制.比如:当存在磁链误差正向较大时,磁链比较器的输出为1,且转矩的误差为正向较大时,选择的电压矢量为U1(011);把此规律反映到转矩的参考电压矢量上,于是有当存在转矩误差为正(P)、转矩误差的变化率为正(P)时,输出的参考电压矢量为负大(NL).根据这一普遍的变化规律得出如表1所示转矩的模糊控制规则,该控制规则适用于空间矢量调制的直接转矩控制系统.

表1 磁链模糊控制规则表
模糊规则采用IF-T HEN形式表示,转矩模糊控制器第i条规则表示为:

其中 :Ai、Bj、Cij分别为转矩误差 ET、转矩误差变化率Δ ET、以及参考电压矢量q轴分量Uq的子集变量.转矩模糊控制器共有9条模糊控制规则.
3.3 模糊推理与清晰化
磁链/转矩模糊控制器均采用Mamdani模糊推理法,第i确条模糊规则所对应的模糊关系,如下式:

由于模糊推理得到的控制量是一个模糊集合,而被控对象只能接受精确的控制量,因此必须经过清晰化处理,将模糊控制量采用重心发转换成精确量实现控制.
4 磁链神经网络控制器的设计
4.1 磁链神经网络结构
磁链参考电压矢量Ud采用三层BP网络来重构实现.神经网络结构如图4所示:

图4 神经网络定子磁链网络结构
4.2 磁链神经网络学习算法
神经网络可以表示任意的非线性函数,三层的神经网络输入层、隐含层、输出层的关系如下式:

式中k表示输出单元,j表示隐含层单元,i表示总的输入单元,v代表神经网络单元的值,y代表神经网络的输出,ωij(n)表示从神经元i到j的权值,f为激活函数.假设d(n)为神经元的期望输出向量,瞬时误差向量为:

目标函数可以定义为:

由最短下降的规则确定权值ωlm(n)修正量为:

η为学习率,为了保持算法稳定,在权值调整中引入动量因子α:

从理论分析可以证明这种网络结构只要隐层数目足够多就可以映射任意函数.以平面正交两相α-β坐标系为基础,网络输入参数为磁链给定值 ψ*s和磁链计算值ψs,输出为参考电压矢量Ud,激活函数采用tansig,隐层单元定为4个,训练时根据学习速率和目标误差对隐层单元的个数进行调整.
训练方法采用Matlab6.5中的 trainpbx函数训练.训练结果表明,当隐层单元个数为4时,学习速率为0.2,训练200次就可以使目标误差达到小于0.01.
5 模糊神经网络SVM-DTC系统仿真与实验
5.1 仿真及结果分析
该控制系统主要是以湘潭电机厂研制的矿山机械变频技术中15 kW电机的直接转矩控制方法为具体的研究对象,利用Matlab/Simulink仿真软件搭建了基于模糊神经网络SVM-DTC控制系统仿真模型,对基于模糊神经网络SVM-DTC系统的控制原理进行验证,电机的主要参数为:Pn=15 kW,Un=380 V,Rs=4.35 Ω,Rr=0.435 Ω,Ls=4 mH,Lr=2 mH,p=2,Lm=69.31 mH,J=0.089 kg·m2.具体仿真条件设定为:负载启动,转速给定值为50 r/min;负载转矩为0;模糊神经网络SVM-DTC系统和传统的SVM-DTC,系统的仿真参数相同,仿真时间设为0.8 s.

图5 仿真波形图
由图5中的仿真结果可知,模糊神经网络SVM-DTC系统,相对于传统SVM-DTC系统在低速时,定子磁链的更接近圆形,基本没有脉动量;转速响应变快,低速时很快变得很平缓,电流与转速的脉动量较传统的SVM-DTC系统大大减小;转矩响应速度加快,并能很快达到稳定、无波动.
5.2 实验及结果分析
为了进一步验证本文提出的控制方法的正确性,在以TMS320LF2812为控制芯片的控制平台上进行实验验证,对应的电机参数与仿真参数相同.实验结果如下:
图6中实验结果表明,仿真结果与实验结果基本相近,从而进一步验证了基于模糊-神经网络SVM-DTC系统具有更好的转矩特性和转速特性,并且对系统的磁链误差有很好的鲁棒性,大大提高了控制系统的低速性能,从而证实了新策略的有效性.

图6 实验波形图
6 结 语
论文基于模糊控制和神经网络理论提出一种模糊-神经网络SVM-DTC控制策略.传统的SVM-DTC系统采用PI控制器产生参考电压矢量,采用转矩模糊控制和磁链神经网络控制代替PI控制器,进一步提高SVM-DTC系统低速时的控制性能.通过与传统的SVM-DTC系统进行了仿真、实验比较验证.仿真和实验结果表明,该控制方法能够大大的减小系统的转矩、转速及磁链的脉动量,可有效提高系统的动静态性能,尤其是控制系统的低速性能.
[1]王焕刚,徐文立.一种新型的感应电动机直接转矩控制[J].中国电机工程学报,2006,24(1):107-111.
[2]何志明,廖 勇,向大为.定子磁链观测器低通滤波器的改进[J].中国电机工程学报,2008,28(18):61-65.
[3]魏 欣,陈大跃,赵春宇.一种基于占空比控制技术的异步电机直接转矩控制方案[J].中国电机工程学报,2005,25(14):93-97.
[4]魏 欣,陈大跃.基于空间矢量调制的异步电动机直接转矩控制[J].系统仿真学报,2006,18(2):405-408.
[5]Z.Xu and M.F.Rahman.An Improved Stator Flux Estimation for a Variable Structure Direct Torque Controlled IPM Synchronous Motor Drive Using a Sliding Observer[J].IEEE Transactions on Industry Applications,2005,38(1):2484-2490.
[6]Chiaz.Ben Jabeur-Seddik,Farhat.Fnaiech Senior member IEEE.Hysteresis and Fuzzy Based Noninear Controller for a Direct Torque Control of An Induction Machine[J].IEEE International Conference Industrial Technology,2007,150:405-410.
[7]Xiying Ding,Qiang Liu.The Fuzzy Direct Torque Control of Induction Motor Based on Space Vector Modulation[J].IEEE Transactions on Industry Applications,2007,42(9):1242-1249.
[8]郎宝华,刘卫国.基于空间矢量调制的PMSM直接转矩控制系统[J].系统仿真学报,2009,21(3):836-844.
Direct Torque Control Based on Fuzzy-neural Network Space Vector Modulate
CAI Bin-jun
(College of Applied Techndogy,Hunan Institute of Engineering,Xiangtan 411101,China)
T o improve SVM-DTC system low-speed performance,two PI controllers are used to generate reference voltage vector in conventional SVM-DTC.The parameters of PI controller are difficult to determine.A new direct control(DTC)strategy of induction motors based on fuzzy-neural space vector modulation(SVM)is proposed.The flux fuzzy controller has two inputs(flux error and its change rate)and one output(the flux component of reference voltage vector),while the torque neural network controller has two inputs(flux error and its change rate)and one output(the torque component of reference voltage vector).Simulations are carried out to verify the proposed strategy,and the simulation results are compared with conventional SVM-DTC.The simulation and experiment are carried out based on simulation and DSP2812.The simulation and experiment results verify that fuzzy neural network SVM-DTC is capable of effectively improving the control performance,especially improving SVM-DTC system low-speed performance.
direct torque control;SVM;fuzzy controller;neural network;low-speed performance
TM301.2
A
1671-119X(2011)01-0004-05
2010-09-06
湖南省教育厅科研资助项目(09C261)
蔡斌军(1976-),男,讲师,研究方向:电力电子与电力传动、电机控制.
