高精度空间相机像移补偿机构设计与试验
2011-03-16谷松王绍举金光
谷松,王绍举,金光
(中国科学院 长春光学精密机械与物理研究所,长春 130033)
高分辨率TDICCD空间相机对地推扫成像时,由于受卫星飞行速度、地球自转速度等因素的影响,地物在相机像面产生的像移速度将会与 TDI CCD 列的方向产生一定的倾斜角,即偏流角[1]。偏流角的存在会使图像边缘模糊,灰度失真,对比度和分辨率均下降[2]。为了降低像移对成像质量的影响,以获得清晰的图像,需要将TDI CCD列的方向调整到与像移速度的方向一致,使TDICCD沿列的累积积分过程中完成转移速度与地物像移速度的匹配,这一过程称为像移补偿。完成像移匹配可通过像移补偿技术来实现。一般情况下,像移会在两个正交方向上产生分量,一个是飞行器飞行方向上产生的前向像移分量,另一个是在飞行器飞行的垂直方向上产生的横向像移分量,即由偏流角产生的像移分量。进行像移补偿时,首先通过调整偏流角消除横向像移分量,然后再通过补偿前向像移达到清晰成像的目的[3]。因此,需要设置像移补偿机构[4-7]。传统的像移补偿机构体积大、质量重,不适合当今空间相机小型化,轻量化的发展趋势。本文针对此问题设计了一套精度高、体积小、质量轻的像移补偿机构。
1 像移补偿机构组成及传动原理
空间相机像移补偿机构具有精度高、调整范围小、结构紧凑、质量轻的要求。目前,空间相机像移补偿机构大体有两种传动方式,一种是丝杠丝母传动,另一种是全齿轮传动。丝杠丝母传动结构简单,易于加工,费用低,但在真空低温条件下的两个极限位置易产生卡滞现象,抗冲击能力差[5];而全齿轮结构同样存在抗冲击能力差的缺点,并且由于偏流角度调整范围小,只能用到局部齿,付出代价相应较大。本文设计了一种凸轮、齿轮相结合的像移补偿结构,凸轮、齿轮等运动件表面经特殊处理后无冷焊、无卡滞现象,有很好的抗冲击能力,同时结构也比较简单,将凸轮设计为一偏心轮,解决了凸轮曲线加工要求高的难点。
像移补偿机构主要由减速机构、轴系和 CCD组件组成。像移补偿机构结构组成如图1所示。其传动原理如图2所示。

图1 像移补偿机构结构组成Fig.1 The configuration of image motion compensation mechanism

图2 像移补偿机构传动原理图Fig.2 Drive structure of the drift angle adjusting
轮驱动蜗杆带动蜗轮转动,蜗轮带动凸轮在滑槽中转动,驱动焦平面组件绕轴线旋转,实现了像移补偿的功能。凸轮传动机构运动转化原理如图3所示,凸轮传动机构类似于一个摆臂结构,我们称之为偏流摆,由于凸轮半径是一个变值,并且是按一定规律变化的,凸轮推动滑槽,使偏流摆按一定规律左右摆动,这种规律是可设计的。凸轮机构运动转化原理可以简化为图4。

图3 凸轮机构运动转化原理图Fig.3 The elements diagram of cam transmision

图4 凸轮机构运动转化原理简化图Fig.4 The elements predigestion diagram of cam transmission
2 精度分析
传动误差与空回是评定像移补偿机构传动精度的动态性能指标。本像移补偿机构的控制系统为闭环控制,编码器作为反馈元件,它所反映的是焦平面的位置,通过反馈信号控制电机转动。由于编码器与焦平面之间传动误差与空回的存在,使编码器不能反映实际焦平面的位置,电机利用编码器发出的反馈信号对像移补偿角度进行控制,导致调偏流实际角度偏离理论角度值,从而相机像面实际位置偏离像面理想位置。传动误差与空回过大,会使像移补偿机构不能实现像移补偿,使相机成像模糊,甚至不能成像。因此,分析编码器与焦平面之间的传动误差与空回是否在误差允许的范围内是十分必要的。这是对于这种半闭环像移补偿机构所特有的[9]。
像移补偿机构的误差主要来源于轴S-1和轴S-2之间的齿轮传动误差、空回及凸轮传动机构的传动误差、空回。
2.1 齿轮传动误差计算
齿轮传动误差是在齿轮的加工制造、装配过程中产生的。传动误差的大小是由齿轮的加工精度、装配质量等因素决定的。齿轮的加工精度越高、装配越合理,齿轮机构的传动误差越小,传动精度越高。齿轮机构的传动误差是由齿轮固有误差和装置跳动误差引起的。齿轮的固有误差就是齿轮的实际齿廓对理想齿廓的偏离。产生齿轮的固有误差的因素主要有:齿轮的几何偏心;齿轮的运动偏心;齿轮的基节误差;齿轮的齿形误差。装置跳动误差就是实际旋转中心、对理想旋转中心的偏离。产生装置跳动误差的因素主要有:齿轮孔与轴之间的间隙;齿轮安装处轴径的跳动;滚珠轴承环偏心。
由于齿轮误差是随机的连续变量;各种误差源的分布都是相互独立的;齿轮误差的分布遵循正态分布。因此,可以用数理统计的计算方法对各部分误差进行计算。
像移补偿机构的传动误差主要为齿轮6、齿轮5啮合处的传动误差。由于齿轮5、6加工精度等级为5-6-5,根据机械设计手册可求得齿轮6、齿轮5啮合处角值传动误差为268"。
2.2 凸轮传动误差计算


带入值得凸轮传动误差为:

2.3 空回计算
焦平面到编码器空回由凸轮机构空回和齿轮5和齿轮6啮合处产生,但是齿轮6采用了消间隙设计,所以齿轮5和齿轮6啮合处空回基本为0;凸轮机构空回主要由凸轮与滑槽之间间隙引起,间隙为0.005,凸轮与滑槽之间间隙引起的偏流角空回为:

则系统总误差为:

3 测量试验与结果
3.1 精度检测试验[10]
精度检测方法如图5所示,在偏流机构基准面上贴基准镜,驱动偏流转动一定角度,用经纬仪测量偏流角度的实际值,可以得到传动误差,试验所用经纬仪的精度为3",而偏流机构的传动精度要求小于3',所以所用经纬仪可以作为检测工具。

图5 精度检测方法Fig.5 The method of precision

表1 力学振动试验前精度检测试验结果Tab.1 Result of precision test before dynamics vibration
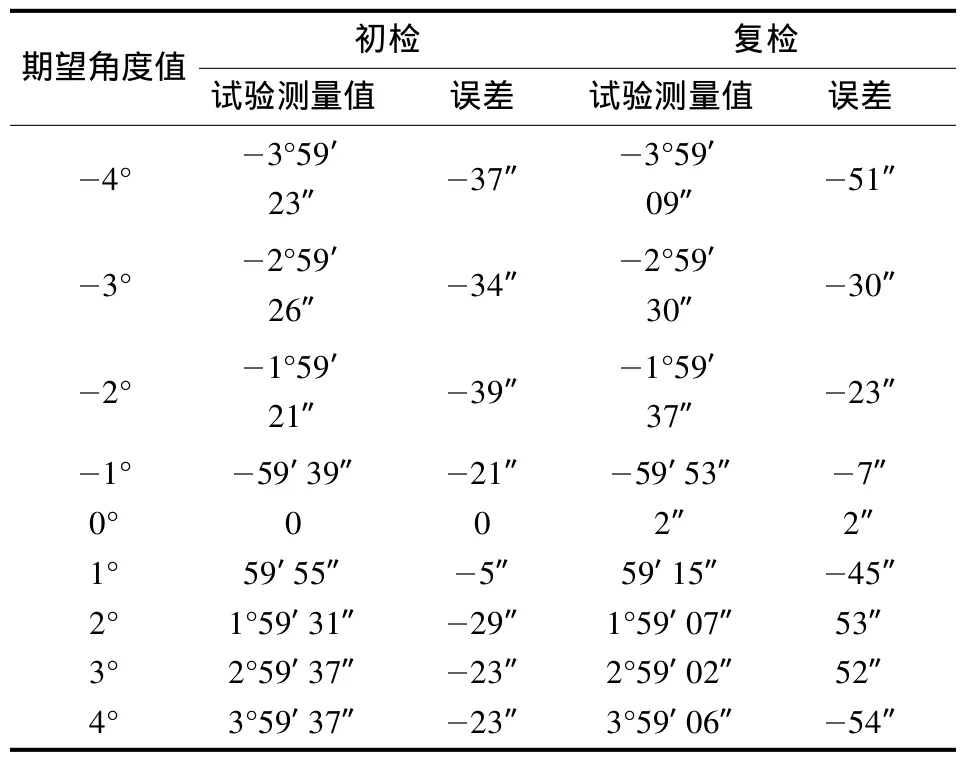
表2 力学振动试验后精度检测试验结果Tab.2 Result of precision test after dynamics vibration
由于偏流角在 4°~4°之间,本实验中给定偏流机构转动角度为 4°、 3°、 2°、 1°,0°、1°、2°、3°、4°,并进行复检,力学振动实验前测量结果如表1,力学振动实验后测量结果如表2。
从实验数据可知,力学振动试验前后传动精度均小于1',精度高,满足使用要求,并且可以断定由于发射带来的动态载荷不会对像移补偿机构的精度造成影响。
3.2 力学振动试验
为有效的验证偏流机构组件自身的力学特性,考核总体力学环境对偏流机构的影响,分别在X、Y、Z三个方向对偏流机构进行了0.5g正弦扫描、5g正弦振动、和4g随机振动试验。试验状态如图6所示,偏流机构一阶频率为150Hz;正弦振动最大放大倍率在100Hz处约为2倍,由于偏流机构的第一阶频率大于100Hz,故在0Hz~100Hz间结构件响应很小,试验响应曲线与输入曲线近似一致,说明结构件刚度好,在0Hz~100Hz间具有良好的结构稳定性;随机振动试验最大响应放大倍率约为输入的5倍,均满足设计要求。
4 结论
像移补偿机构是空间相机的关键部件之一,直接影响空间相机的成像质量。本文设计的像移补偿机构精度高—可以达到1',刚度好—一阶频率150 Hz,结构紧凑,质量轻,体积小,适合空间相机的高精度小型化的发展趋势,对小型化光学卫星有效载荷像移补偿机构设计有一定借鉴作用。
[1]许永森,丁亚林,田海英,等.推扫式航空遥感器像移补偿精度的分析[J].光学精密工程,2009,17(2):454-458.
[2]童子磊.CCD相机的像移补偿技术[J].激光与红外,2005,35(9):628.
[3]于涛,徐抒岩,韩诚山,等.航空相机偏流角的间歇式实时调整[J].光学精密工程,2009,17(8):1909-1914.
[4]李松,张立平.空间相机偏流调整旋转轴系的设计与精度分析[J].光学精密工程,2004,12(2):141-144.
[5]李友一.空间相机偏流角控制的研究[D].中科院硕士论文,2001.
[6]刘明,吴宏圣,匡海鹏,等.航空相机的像移补偿方法及应用[J].光学精密工程,2004,12(4):30-34.
[7]李仕,张葆,孙辉.航空成像像移补偿的并行计算[J].光学精密工程,2009,17(1):226-230.
[8]黄猛,刘家燕,张葆,等.小型面阵航空相机系统的像移补偿[J].电光与控制,2009,16(3):69-74.
[9]张洪文.空间相机.航空相机调焦技术研究[D].中科院硕士论文,2003.
[10]谷松,王绍举.空间相机调偏流机构的设计与控制[J].光学精密工程,2009,17(3):615-620.
[11]高飞,张葆,刘大禹.一种空间相机调焦机构的设计研究[J].长春理工大学学报,2008,31(4):74-76.
