光伏发电MPPT的灰色模糊PID控制
2011-03-07连瑞娜熊和金
连瑞娜 熊和金
(武汉理工大学自动化学院,武汉 430063)
为了充分、高效地利用太阳能,使太阳能尽可能多地输出转变能量,MPPT技术成了光伏发电的关键技术.MPPT控制通常采用DC/DC电路,通过采集光伏电池的输出电压和电流,计算出输出功率,结合控制算法,通过控制DC/DC电路的占空比来控制输出电压从而跟踪到最大功率点.已有的MPPT控制算法有恒定电压跟踪法(CVT)、扰动观测法(P&O)、增量导纳法(INC)等[1],目前国内通常采用CVT法,国外比较常用的有P&O法、INC法.其中CVT法控制简单,易于实现,但是忽略了温度对光伏电池开路电压的影响,所以并不能完全跟踪最大功率点;P&O方法,所需参数少、对传感器精度要求不高,但是其存在最大功率点有震荡,由于天气的变化存在跟踪速度及引起“误判”等问题,INC法虽然能克服“误判”现象,但其控制复杂,对传感器要求较高加上要借助于DSP,增加了费用[2].将灰色模糊/PID控制用于光伏发电的MPPT上,经过Matlab仿真验证其跟踪效果和品质更加良好.
1 光伏电池特性
光伏电池是一种非线性电源,随着外界环境的变化和负载的变化,其输出也发生变化,通常所用的太阳能电池组件是由许多电池单元串联或者并联起来获得所需要的电压和电流.其中
负载电流

开路电压

光生电流

式中,T、G分别为温度和光强,由光伏电池的数学模型可知,其输出电压和电流与温度和光照强度有关,图1为光伏电池在不同光照强度下的功率-电压曲线.

图1 光伏电池P-U曲线
从光伏电池的P-U特性曲线可知,P-U曲线是单峰曲线,光伏电池在一定的环境条件下只有一个最大功率点,在最大功率点右边输出功率随着输出电压的增大而增大,最大功率点左边则相反,并且最大功率点左右两端的ΔP/Δ U符号不同.
2 灰色模糊PID控制的MPPT的实现
模糊控制算法是根据人的经验得出的控制规则,不依赖于被控系统精确的数学模型,特别适用于非线性系统.光伏电池就是一种非线性电源,用模糊控制的方法能够解决环境变化时跟踪MPP的速度问题.本文控制原理参考P&O算法,根据图1的P-U曲线判断距离MPP的远近,在远离最大功率点时采用模糊控制,接近最大功率点时采用PID控制,但是模糊控制是有差控制,在最大功率点仍然存在误差、震荡现象[3],引用PID控制能够有效减轻在最大功率点的震荡,解决跟踪精度问题.由于这些控制都属于事后控制,灰色控制根据已发生的行为特征量预测未发生的事件,属于超前控制、预测控制[4],并且用灰色预测模型的预测值与上一时刻光伏电池的输出值进行比较,比较结果作为模糊控制器或者PID控制器的输入,得出新的输出,灰色模糊PID的控制原理如图2所示.

图2 灰色模糊PID控制框图
2.1 模糊控制器的设计
2.1.1 确定输入输出量与模糊子集
设模糊控制器为双输入单输出的二维控制器,其中输出为DC/DC电路的占空调整步长Δd,输入变量为

式中,PV(k)和UV(k)分别指光伏电池第k时刻光伏电池的输出功率和电压,由光伏电池的P-U特性曲线可知,当e(k)=0时,说明光伏电池已工作在最大功率点[5].
e(k),Δ e(k)都定义为8个模糊子集分别为{NB, NM,NS,NO,PO,PB,PM,PS},Δd定义为5个模糊子集为{NB,NS,ZO,PB,PS},并将e(k),Δ e(k),Δd的论域分别规定为{-1,1},{-0.5,0.5},{-0.1, 0.1}.
2.1.2 确定模糊推理规则
本文参考P&O算法原理,通过对P-U曲线的分析得出以下结论,即:
(1)当e(k)<0且Δe(k)<0时,P从右侧远离Pmax;
(2)当e(k)<0且Δ e(k)>0时,P从右侧向Pmax靠近;
(3)当e(k)>0且Δe(k)<0时,P由左侧远离Pmax;
(4)当e(k)>0且Δ e(k)>0时,P由左侧向Pmax靠近.
根据以上4种情况,确定模糊控制器推理规则,使e(k)始终向零的方向靠近,从而使光伏电池工作在最大功率点.根据以上原理,并且遵循在远离最大功率点时采用较大步长,在最大功率点附近时采用较小步长的原则[6],得出模糊控制规则见表1.
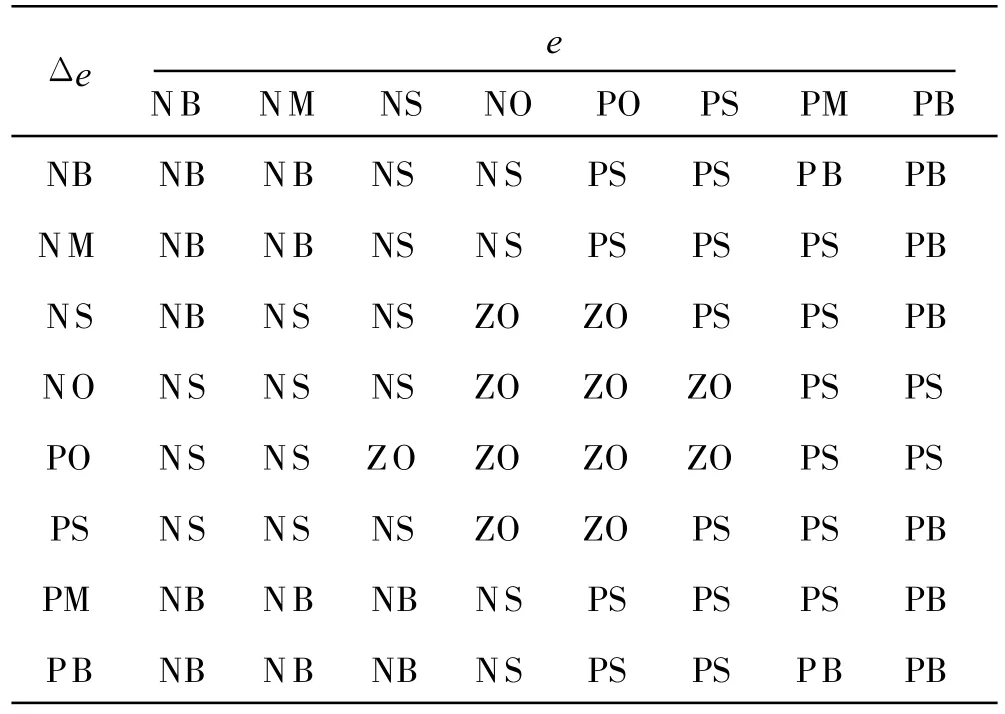
表1 模糊控制规则表
2.1.3 确定隶属函数
选择常用的三角形作为隶属函数形状,e(k),Δe (k),Δd的隶属函数如图3所示.

2.1.4 解模糊
通过模糊推理得到的通常是一个模糊集合或者隶属函数,而实际控制中需要一个精确的单值,这个将模糊推理得到的模糊输出变换成精确输出的过程就是解模糊的过程,解模糊的方法有重心法、最大隶属度法、平均法、加权平均法等,在此所采用的解模糊方法是最大值平均法(MOM).
2.2 灰色预测的实现
灰色系统是指信息部分明确部分不明确的系统,通常采用GM(1,1)单阶单变量模型对系统进行灰预测[7].根据传感器检测的光伏电池Uk-5,Uk-4,Uk-3, Uk-2,Uk-1时刻的输出电压预测Uk,将预测值作为实际输出,得出e(k),Δe(k)和ΔP/Δ U,通过模糊控制器/PID控制器实现控制.具体的预测过程如下.
设传感器测得的光伏电池的输出电压列向量为

对输出量的原始数据进行累加处理得

其中

根据U(0)和U(1)得到k+1步预测输出电压为

其中
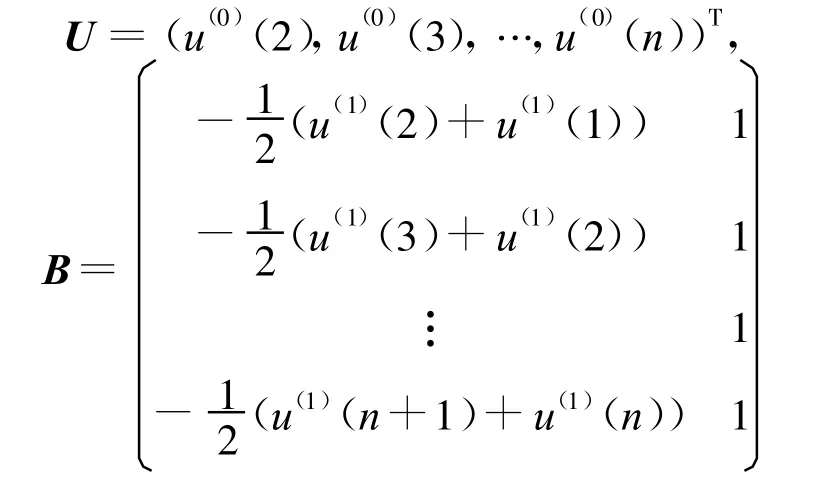
式中,u为输出电压的预测值.
3 仿真结果
根据以上分析,采用Matlab/Simulink对系统进行仿真.其中DC/DC变换电路采用boost升压电路,模糊控制器、PID控制器的切换采用 User Defined Function中的逻辑判断函数根据ΔP/Δ U范围来进行切换[8],根据所选的光伏电池在标准测试条件(t= 25℃,G=1 000 W/m2)设置光伏电池参数:Pmax= 112W,Umax=36.2 V,Imax=3.05 A,Uocs=43.5 V, Iocs=3.28A,Kt=2.06mA/℃,KT=-0.77V/℃.当光照强度在0.25 s从800 W/m2突变到1 000 W/ m2时,仿真结果如图4所示.
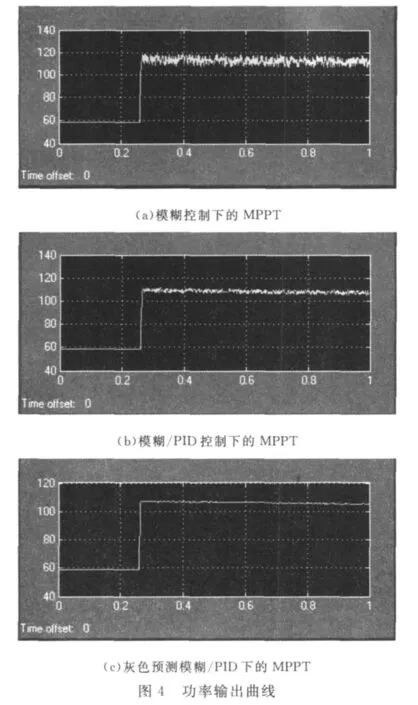
分析:根据仿真波形,可知在外界环境相对稳定的状态下,即工作于25℃,800 W/m2时,系统稳定的输出功率约为59.8W的功率,当在0.25s,光照突然由800W/m2跃变为1000W/m2时,输出功率基本稳定在最大功率点112 W附近.将灰色模糊PID控制下的MPPT跟踪效果与模糊控制和模糊PID双模控制下跟踪的稳态误差和精度进行对比,见表2.
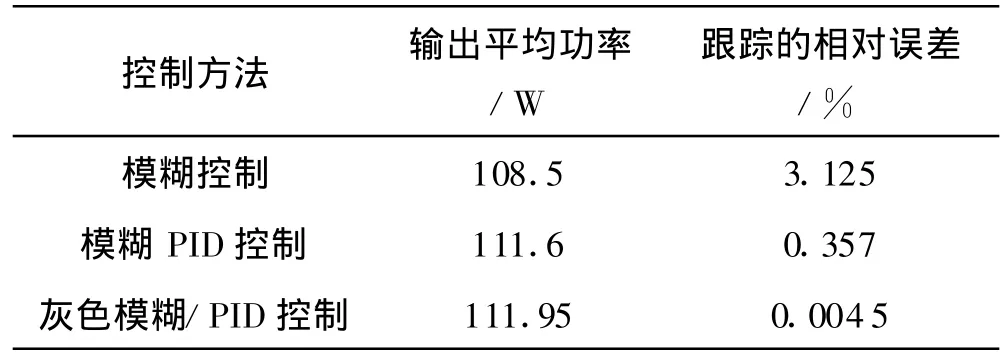
表2 仿真结果
4 结 论
采用灰色模糊/PID控制算法能使系统快速、稳定地响应外界环境的变化,从而减轻了最大功率点附近的震荡造成的功率损失,该控制算法,相对于光伏发电系统中MPPT的其他算法具有更好的动态和稳态性.
[1] 赵争鸣,刘建政,孙晓瑛,等.太阳能光伏发电及其应用[M].北京:科学出版社,2005.
[2] 虞正琦.基于模糊控制的光伏发电系统MPPT技术研究[D].武汉:华中科技大学,2007.
[3] 张 超,何湘宁.非对称模糊 PID控制在光伏发电MPPT中的应用[J].电工技术报,2005,20(10):72-75.
[4] 熊和金,徐华中.灰色控制[M].北京:国防工业出版社, 2005.
[5] Katiraei F,Iravani R,Hatziargyriou N,et al.Microgrids Management[J].IEEE Power and Energy M agazine,2008,6(3):54-65.
[6] Sera D,Kerekes T,Teodorescu R,et al.Improved MPPT Algorithms for Rapidly Changing Environmental Condition[C].12th International power Electronics and Motion Control Conference,2006:1614-1619.
[7] 邹 健.智能预测控制及应用研究[D].杭州:浙江大学, 2002.
[8] Nicola Femia,Giovanni Petrone,Giovanni Spagnuolo. Optimization of Perturb and Observe Maximum Power Point Tracking Method[J].IEEE Trans on Power E-lectronics,2005,20(4):963-973.
