基于线状阵列扫描的激光雷达快速三维成像
2011-03-07蔡银桥童小华
蔡银桥,童小华,舒 嵘
(1.中国科学院上海技术物理研究所,上海200083;2.同济大学测量与国土信息工程系,上海200092)
激光具有单色性、准直性、大功率、短脉冲等特点,从19世纪60年代以来,它在测距和成像等领域获得了广泛应用.在民用方面,激光技术最初主要用于电子测距(electronic distance measurements, EDM);后来,激光技术逐渐应用到全站仪中,诞生了无反射棱镜全站仪[1];在20世纪90年代,一些测量仪器厂商尝试将激光测距仪安装在云台单元上,它很类似现在的激光扫描仪,但是其扫描速度和成像精度均较低;同时,一些学者提出利用包含两个镜子的光机扫描仪来成像,两个镜子用来控制激光光束在相互正交的方向上偏转,这些仪器被称为成像激光雷达[2].由于有效距离较远,目前大多数激光扫描仪是采用飞行时间法(time of fligh t,TOF)来测距的[3];在工业领域中,为了获取物体表面更高的测量精度(微米级),一些仪器设计人员采用三角测量原理来精确测距[4];基于相位法测距的成像激光雷达工作距离和成像精度介于上述两种测距方式之间[5].激光雷达可以搭载在不同平台上,既可以放在地面上静态测量小目标,称为地面激光雷达(terrestrial laser scanner,TLS)[6-7],也可以搭载在飞机、宇宙飞船等平台上实施大范围观测,称为机载激光雷达(airborne laser scanner,ALS)[8].
对于目前大多数商用的地面激光雷达来说,每次激光脉冲只能获取一个目标点的三维坐标.尽管现在的激光脉冲频率在不断提高,但在需要获取一个大范围场景的三维点云图像时,激光扫描仍然要花费较长的时间.另外,对于正在作业的工厂、施工场地而言,地面在激光扫描工作中会有微小的震动,激光扫描时间越长,三维成像的误差越大[9-10].一些研究人员提出了不同于单点扫描方式的激光雷达,以实现目标区域的高效、实时成像,主要包括线扫描,面扫描和FLASH激光雷达.陈宇伟等人提出了一个应用于机载的线扫描激光雷达[11],卜弘毅提出了一种线阵激光雷达扫描的理论,但没有详细描述其成像方程和实验结果[12].Colin等人用面阵探测器相位调制凝视成像实现国际空间站三维成像[13]. Flash激光雷达由面阵雪崩阵列二极管焦平面器件接收激光回波,实时快速输出三维图像,该项技术对探测器要求很高,目前处于探索阶段[14].
本文提出了一种基于线阵探测技术的快扫描激光雷达成像系统,该系统的测距方式和光束偏转单元与单点扫描激光雷达一样,它的最大特征是激光雷达每次脉冲可以获取多个点的位置信息,与目前单元激光雷达成像相比,该仪器的成像速度可以提高十倍甚至几十倍.
1 线阵激光雷达基本工作原理[12]
激光雷达主要由激光器及其驱动、二维摆镜及其驱动、激光探测单元、信息处理单元、二次电源等5部分组成,其工作原理框图如图1所示.

图1 激光雷达系统框架Fig.1 System structure of TLS
激光器在激光驱动电路的控制下产生高重频激光脉冲,激光器由柱透镜扩束为线列激光光束,在二维高速摆镜的驱动下对目标区域进行扫描.多元接收组件主要由线状激光和多元线阵探测装置组成.激光器发射的激光脉冲经柱透镜压缩后形成狭长的线列,返回的回波脉冲由多元线阵探测器独立接收.
一维摆镜按连续的正弦模式进行往复扫描,另一维摆镜按步进的方式扫描,在极短时间内完成对某一特定区域的三维成像.设X维以常用的正弦方式进行扫描,Y维按照该方向上扫描角度线性递增方式扫描,则扫描角度的数学表达式为

式中:θmax为光线水平方向的最大偏移角度;θ0为光线垂直方向的最大偏移角度.
2 激光雷达成像方程
根据多元线阵激光光学原理,结合解析几何知识,可以推导出激光雷达成像方程.线阵激光光路如图2所示.

图2 线阵激光雷达光路图Fig.2 Figure of optical path in linear Array TLS
图2中OX,OY是两个平面摆镜的中心,A为激光光源,AS→SS′→S′P为线阵激光某一单元的光路,θk为AOX与AS的夹角,其大小是由激光探测单元编号决定的,e和b是已知的仪器设计参数,分别为激光点与M镜中心距离以及M,N镜中心之间距离.激光扫描仪的直角坐标系OY-XYZ的建立原则:当两面镜子转角处于45°的初始平衡状态时,以N镜中心为坐标系原点,X轴定义为入射光AOX的反方向,Y轴定义为AOX经M镜反射后的方向,Z轴定义为AOX经N镜反射后的方向.假定阵列激光扫描仪的接收单元数为p,激光雷达系统获取的原始观测量包括两个镜子的旋转转角(θx,θy)和多路激光距离(R1,R2,…, Ri,…,R p).下面详细推导由观测量、已知量(e,b)构成的激光扫描仪三维成像方程.
2.1 lAS经M镜反射后的光线方程
假若线阵激光的大小为φ,扫描布设接收单元数为N,第k条激光光线AS与X轴的夹角为

以OY为坐标中心建立直角坐标系,OX在激光雷达本体坐标系下的三维坐标为(0,-e,0).光线AS的起始点A在激光雷达本体坐标系下的三维坐标为(b,-e,0),与N镜的交点S在激光雷达本体坐标系下的三维坐标为(0,-e,-b tanθk),lAS直线方程可表示为

M镜沿 X到Y轴方向转动角度θx后,平面方程可表示为



由式(6),(7)得到

即A′在激光雷达本体坐标系下的三维坐标为(-b sin 2θx,b cos 2θx-e,-2b tanθk).
N镜沿Y轴负方向到Z轴正向旋转θy后,平面方程可表示为

lA′S的直线方程为

假定S′在激光雷达本体坐标系下的三维坐标为(x S′,yS′,zS′),联合方程(9),(10)可得
2.2 l AS再经过N镜反射后的光线方程

利用方程(12),(13)求得

故可以确定反射后的直线向量 l S′S″(n x,n y,n z),其中:

将式(15)生成的向量进一步化简为

最后求得P点在激光雷达本体坐标系下的三维直角坐标为
联立公式(11),(16),(17)即为多元线阵探测器各个单元在激光雷达本体坐标系下的三维直角坐标.
令θk=0,式(11),(16)可转化为


根据式(18),(19),公式(17)可以简化为

式中:R″=R i-e.
式(20)即为单元扫描型激光雷达在激光雷达本体坐标系下的三维成像方程.
3 影响激光雷达成像质量的主要因素
3.1 内部因素
距离是激光雷达成像中最基本、最重要的观测量之一.测距误差又分为偶然误差和系统误差.激光扫描仪的距离测量产生的随机误差精度与信噪比(SNR)密切相关,而SNR又受到接受的激光能量、探测器特性影响.除了SNR,距离测量精度还受激光脉冲特征、阈值探测器的敏感性及光学串扰等影响.距离测量中的系统误差主要包括时间测量单元、零位误差、尺度误差和混合像元.
激光雷达扫描仪通过组合激光光束偏转单元来获取高密度的点云数据.这部分引入了另一种仪器误差,它影响了角度测量精度.电流扫描仪的精度由其组件确定.从电机角度看,主要是电流计的磁滞和非线性.来源于扫描镜产生的角度测量误差包括扫描镜安装过程中产生的变形、在快速扭转过程中产生的镜子表面变形、由于温度变化而产生的振镜表面变形、振镜表面受到不断腐蚀以及在制造过程中振镜表面的非平坦性.
激光扫描仪垂直轴是与两个相互正交的振镜垂直的轴,准直轴是第二个反射镜的中心和对象表面的激光点中心的连线,水平轴是第二个扫描镜的旋转轴.由于制造的缺陷,这些轴不能完全对齐,会产生准直误差和水平轴误差.
3.2 外部因素
具有某些特征的扫描对象会影响激光雷达成像质量.其中最重要的一个因素就是对象表面的反射率.反射率定义为反射与入射激光能力之比,它的影响因素包括对象的材料属性、表面颜色、激光波长、激光束的入射角度、表面粗糙度、极化强度以及表面温度与湿度.
环境因素,例如周围的温度、压力、相对湿度和震动等在激光雷达成像过程中很重要,对测量误差的贡献很大,而且是很难控制的不断变化的因素.激光雷达成像质量受环境的影响主要包括激光光束在大气里传播,由于恶劣天气条件对扫描成像的影响,包括大雾和阴霾等,周围环境产生的辐射干扰以及扫描过程中平台不稳定性的影响.
4 成像实验及结果
根据多元线阵激光雷达原理,设计了一种包含24个接收单元的激光雷达扫描仪原理样机,相邻探测单元间隔为2m rad.为了研究多元线阵激光雷达扫描仪的性能,在天气状况良好的时候将该仪器放置于室内某固定平台上,在0.2 s内扫描视场角为±15°的室外场景,测试靶板放在距离扫描仪30m的区域,整个扫描过程一次性完成,没有进行重复扫描.利用上述点云坐标反演公式将获取的原始测角、测距数据转化为激光雷达本体坐标系统下的三维直角坐标,为了点云能更直观地显示,按照目标点与扫描仪的距离差异将不同位置的点赋予不同的RGB(红绿蓝)值.
4.1 分辨率
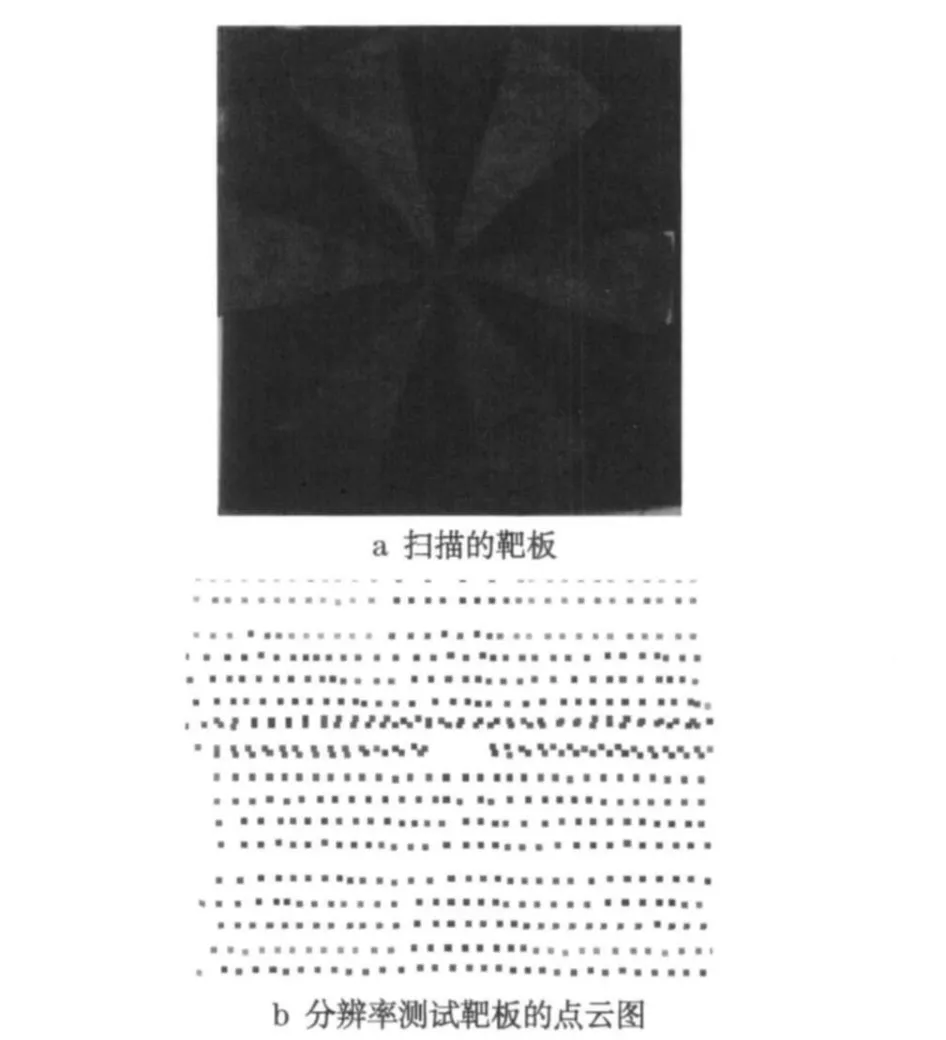
图3 激光雷达角度分辨率测试Fig.3 Target for angular reso lution test
分辨率是指利用激光扫描仪可以探测到的最小特征,主要包括两个指标[15]:①角度(平面)分辨率,可以分辨同质表面的最小范围,受激光光束发散角和电机扫描采样间隔的影响;②距离(深度)分辨率,扫描仪可以识别的在测距方向上的最小距离变化.
如图3所示,为了测量仪器的平面分辨率,设计了一个等角度的“雪花”状检测板.6个扇形的内角均为30°,边长为1m,且等角度均匀分布,中心相交于一个直径为5 cm的圆心,检测板表面距离后面的挡板为30 cm.
很明显,激光雷达成像扫描仪获取的点云包括两部分:一部分是扇形表面上的点,另外一部分是其身后挡板表面上的点.按照目标点与扫描仪的距离提取扇面上的点云,可以看到,在靶板中心某一范围内没有坐标点,如图4,手工选取该空白区域的边缘点,利用最小二乘法拟合成一个圆,圆的直径约为8 cm.因此,在目前的条件下,激光雷达可以探测到直径8 cm以上的目标.
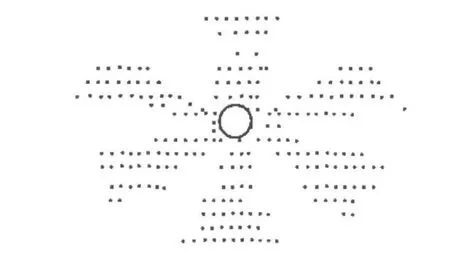
图4 激光雷达扫描仪角度分表率Fig.4 Resu lt of laser scaner angular resolution
用于距离分辨率测试的靶板如图5所示[16-17],靶板上面的一行矩形方块的平面尺寸为20 cm×40 cm,靶面的高度从左到右分别为20.0,15.0,10.0, 5.0和2.5 cm.

图5 距离分辨率测试靶板Fig.5 Target for range resolution test
确定扫描仪点云图像的距离分辨率的详细步骤:①根据人眼识别靶板大概位置,按照其在扫描仪下的精确坐标,从扫描的场景中提取点云数据.②以1.0 cm的宽度截取用于测试距离分辨率的狭窄平面,将三维立体数据转化到二维平面,以更清晰显示其表面特征.假定该平面上、下边缘对应的纵坐标值分别为ψmax和ψmin,则由狭窄平面中的点Pi(xi,yi, zi)组成的集合P可以表示为
③进一步平滑点云数据.将得到的剖面图重采样,假设X坐标的最大和最小值分别为x max,x min,重采样的间隔为Δx,采样数为 N,即 NΔx=xmax-xmin,则重采样后样本区间(x min,x max)内所有点的z坐标均值可表示为

式中:n代表x坐标落在该区间的点数.重采样后的测试靶板的剖面图如图6所示.
从图6中可以看出,快扫描激光雷达能够较好地识别高度为5.0 cm以上的矩形方块,而2.5 cm的方块却很难与底板表面生成的点云区分开来.
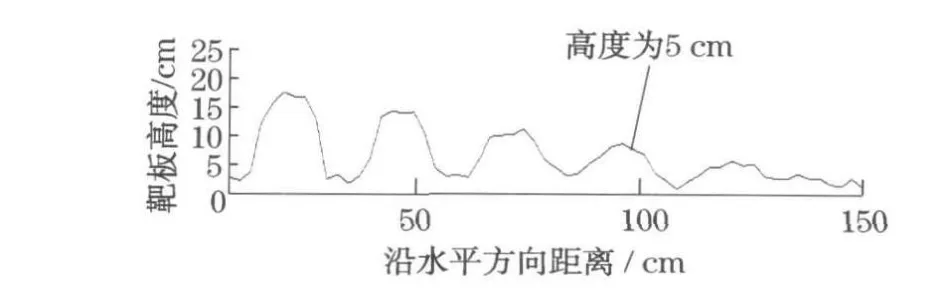
图6 激光雷达成像距离分辨率测试结果Fig.6 Result of range reso lution testing of TLS
4.2 坐标精度
目前比较常见的是采用平面拟合求残差的方法来确定激光雷达的三维直角坐标精度.实验采用垂直于测距方向的一面墙体作为测试目标,扫描后的图像如图7所示,为了更好显示墙体特征,图中显示了3个不同方向观测到的墙体点云.

图7 扫描墙体点云图Fig.7 Point of scanned w all
利用最小二乘算法拟合该墙体平面,拟合后的残差统计量如表1所示,残差的最大值与最小值相差23 cm,标准差约为5 cm,标准化残差图如图8所示.

表1 残差统计量Tab.1 Statistic va lue of the residuals

图8 标准化残差图Fig.8 Standardized residua ls histogram
5 结 语
提出了一种基于多元线阵扫描的新型激光雷达三维成像系统,与目前常用的基于单元扫描的激光雷达相比,该系统每次扫描可同时获取多个点的坐标数据,其成像速度相对传统的单点激光扫描仪有极大的提高,适用于遥感平台稳定性不高或对扫描时间有严格限制的情况.
设计的24元线阵扫描仪原理样机在相邻探测单元相距2 m rad的情况下,可以探测到30 m处直径大于8 cm的目标,其深度分辨率在5 cm以上;利用平面拟合的方法计算的残差的标准差在5 cm左右.从性能上看,与目前国外商用单点TLS还有一定的差距,但是,本仪器设计的初衷是遵从“效率优先”准则,而且它对目标仅仅进行一次扫描,而没有像单点扫描仪一样进行多次重复扫描,在这种条件下,获取的图像质量还是可以肯定的.
[1] Scherer M.Intelligen t tacheometry with integrated im age p rocessing instead of 3D laser scanning[C]∥Proceedings of INGEO 2004 and FIG Regional Cen tral and Eastern Eu ropean Conference on Engineering Surveying.Bratislava:[s.n.], 2004:11-13.
[2] H ebert M,K rotkov E.3D m easuremen ts from imaging laser radars:how good are they?[J].Image and Vision Com puting, 1992,10(3):170.
[3] MäättäK,Kostamovaara J,M yllylä R.Profiling of hot surfaces by pulsed time-of-fligh t laser range finder techniques [J].Applied Optics,1993,32(27):5324.
[4] Rioux M,Blais F,Berraldin J,et al.Range imaging sensors development at NRC laboratories[C] ∥Proceedings of W orkshop Interpretation 3D Scenes.Austin:IEEE,1989:154 -160.
[5] Lichti D.Er ro r m odelling,calibration and analysis of an amcw terrestrial laser scanner system[J].ISPRS Jou rnal of Photogrammetry and Rem ote Sensing,2007,61(5):307.
[6] 刘春,陈华云,吴杭彬.激光三维遥感的数据处理与特征提取[M].北京:科学出版社,2009.
LIU Chun,CHEN Huayun,WU Hangbin.Data processing and feature extraction with three-dimensional remote sensing of LIDAR[M].Beijing:Science P ress,2009.
[7] Reshetyuk Y.Investigation and calib ration of pulsed time-offlight terrestrial laser scanners[D].Stockholm:Department Transport and Econom ics,KTH Publication,2006.
[8] W eh r A,Loh r U.A irborne laser scanning—an in troduction and overview[J].ISPRS Journal of Photogrammetry and Remote Sensing,1999,54:68.
[9] Thiermann V,Rummel A.Correction for transmitter vib rations in laser scintillation measu rements[J].SPIE Proceedings,1998,3494:13.
[10] Balis V,Karam istos S,Kotsis I,et al.3D-laser scanning: in tegration of point cloud and CCD camera video data for the p roduction of high resolution and precision RGB textured models:archaeological monumen ts su rveying application in ancient ilida[C].Proceedings of FIG W orking W eek,A thens: [s.n.],2004:1-18.
[11] 陈育伟,张立,胡以华,等.对地观测激光成像的回波阵列探测技术[J].红外与毫米波学报,2004,23(3):169.
CHEN Yuw ei,ZH ANG Li,HU Yihua,et al.A rray detection technology of echo on earth observation laser imager[J]. Jou rnal of Infrared M illimeter and Waves,2004,23(3):169.
[12] 卜弘毅.空间自动着陆导航激光雷达关键技术研究[D].上海:中国科学院上海技术物理研究所,2009.
BU H ongyi.Research of key technologies of lidar for autonomous planetary landing[D].Shanghai:Chinese Academic Science.Shanghai Institu te of Technical Physics,2009.
[13] Colin L Sm ithpeter,Robert O Nellums,Steve M Lebien. LADAR measu rements of the international space station[J]. SPIE,2001,4377:65.
[14] D ries JC,M iles B,Stettner R.A 32X 32 pixel FLASH laser radar system incorporating InGaA s PIN and APD detectors [J].SPIE,2004,5412:250.
[15] BoehlerW,Vicent M B,Marbs A.Investigating laser scanner accu racy[C]∥X IXth CIPA Symposium.An talya:[s.n.], 2003:696-701.
[16] Pierrottet D F,Amzajerdian F,Meadow s B L,et al. Characterization of 3-D im aging lidar fo r hazard avoidance and au tonomous landing on the Moon[J].SPIE,2007, 6550:08.
[17] And rew C M A llen,Christopher Langley,Raja Mukherji,et al.Full-scale testing and platform stabilization of a scanning lidar system for planetary landing[J].SPIE,2008:6960:04.
