STANAG 5066标准的速率自适应机制研究
2011-03-06陈劲尧
汤 军,陈劲尧,白 翔
(①海军司令部通信部,北京 100141;②中国电子科技集团公司第三十研究所,四川 成都 610041)
0 引言
在短波通信中,短波信道具有时变的传输特点[1-2]。因此,考虑较高的传输速率只有在信道质量良好的情况下才能取得较大的系统吞吐量,而在信道质量恶劣时,选取的速率越高,产生的误码率也越大,因此重传的概率也越大,造成系统吞吐量的降低,甚至造成整个通信链路的损失。因此,在数据传输的有效性与可靠性之间存在着复杂的制约关系,速率自适应正是解决这一问题的有效方法[3-5]。
北约的5066标准对短波通信系统链路层协议[6],以及各子层之间的接口关系进行了详细的描述与定义,其中根据短波信道的特点,专门提出了速率自适应机制,并给出了速率自适应的技术方案。速率自适应机制应在一定的信道条件下,通过自适应算法[4-5,7]来选择最佳的传输速率,以取得系统最优化的性能。需要在链路可靠性与传输速率之间选择一种折中。对北约 5066的速率自适应机制进行了详细分析,并且在 5066速率自适应机制的基础上,仿真分析了简单速率自适应算法与快速自适应算法的性能优劣。
1 5066标准的速率自适应机制
在STANAG 5066标准[6]中,数据传输子层的速率自适应控制属于短波通信系统中的一个主要功能。速率控制要求在数据传输子层与MODEM(调制解调器)之间有一个控制接口,通过该接口来改变MODEM的速率和一些波形参数。因此,速率自适应机制是数据传输子层与MODEM之间的协商控制功能机制。
1.1 初始速率配置
北约5066标准对初始的速率进行了详细定义,初始化的速率配置为300 b/s(可选),采用短交织方式。然而5066标准也说明了初始化时速率配置还可以根据实际情况进行调节。
1.2 速率自适应机制
接收节点通过接收到的信息来判断最优化的传输速率。接收节点可以利用协商类信令信息来与发送节点进行协商,并优化传输速率。该类信息内的“Other parameters”可进行设置,表示了该信息属于速率自适应协商类型,而不是要求改变速率。改变速率的行为与否由发送节点最后决定。
发起速率调整的节点作为速率调整的发起方,在 5066标准里称作DRC master(DRC发起方)。图1显示了一个完整的DRC流程。
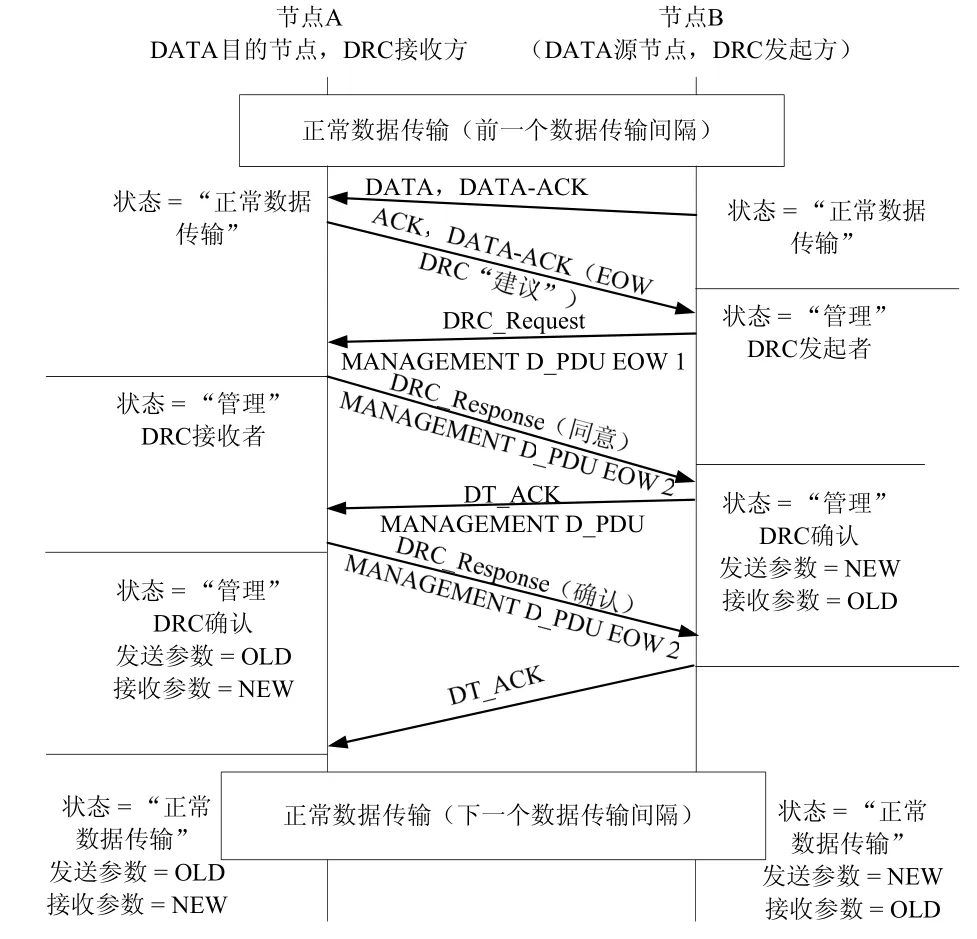
图1 完整的DRC流程
①DRC发起方发送一个DRC请求信息,包含DRC请求,其中的参数等于DRC发起方所期望的新传输速率;
②D_PDU包含了一个DRC请求协商类信息,该D_PDU依靠传输速率进行适当的重复传输;
③DRC接收节点接收到目的地址是本地的“管理”类D_PDU信息后,该信息包含有DRC-请求类型1的管理信息,那么该节点转移到管理状态;
④DRC接收方利用DRC-响应(DRC_Response)信息进行响应,响应策略如下:
a.DRC响应信息应指示“接收”或者“拒绝”,依据“管理”类信息的定义,指示DRC接收方调整参数的能力;
b.如果DRC接收方接受DRC请求,则“原因”域内应该指示“无条件接受”或者“TX和RX参数必须同时调整”等原因;
c.如果DRC接收方拒绝DRC请求,则“原因”域应该指示拒绝的原因;
d.如果请求指示了一个并不恰当的速率修正模式(例如更高的速率或更短的交织),这样的模式不可能被当前节点的噪声或误码率条件所支持,则标识“和本地条件不一致”拒绝DRC请求;
⑤DRC发起方在接收到DRC响应信息后,根据恰当的信息内容决定恰当的响应,DRC回复信息的主要策略为:
a.如果响应协商类信息的流程被重新开始发起,则DRC发起方应该已经知道 DRC接收方的发送与接收参数必须相同。因此,DRC发起方应该回复DT_ACK,即一个“管理”类的D_PDU,其中的ACK域设置为“1”,DRC发起方接受新的参数应用到发送与接收上;
b.DRC接收方拒绝速率的调整,就应回复DRC响应(取消)信息,并终止DRC流程;
c.如果DRC接收方拒绝速率(交织方式)的调整,那么可以发送一个新的DRC请求到DRC发起方,请求一个不同的速率(交织方式)来设置相同的速率;
d.如果请求一个并不恰当的参数设置时,DRC接收方可以拒绝请求,并且描述原因为“与本地条件不一致”。例如,要求一个更高速率与更短交织的请求,可能会被 DRC接收方拒绝,因为 DRC接收方认为这些参数并不能被当前的链路条件所支持;
e.如果节点利用协商信令信息来初始化DRC流程,则发起方应发送 DRC响应(取消),并且在开始另一个新的DRC流程之前等待协商信令的更新建议。如果不使用协商类信息,则DRC请求由发起方发送来请求不同的MODEM参数,这些MODEM参数与本地的条件相一致;
⑥如果一个DT-ACK被发送来响应DRC响应,指示“接受”,节点就应该调整各自的MODEM参数并且进入到“确认(confirmation)”状态;
⑦DRC接收方直到接收到一个DT-ACK信息后,才能改变它的MODEM参数;
⑧如果一个 DT-ACK信息由 DRC接收方发出来回复DRC响应(取消),则两个节点放弃速率调整流程,并返回到MODEM参数的未改变状态。
2 速率自适应算法
5066标准对速率自适应流程进行了详细描述,但没有给出明确的速率自适应算法。短波通信系统的设计者应根据系统的设计要求与短波信道的条件对速率自适应算法进行相应的配套设计。
2.1 简单DRC算法
简单DRC算法通过接收到的FER(误帧率)来选择优化的数据传输速率。FER在数据传输子层对接收到的数据帧进行统计。简单DRC算法描述如下:
①如果收端接收到的错误数据帧数超过了整个接收到数据帧数的50%,则传输速率减少一半;
②如果接收到的FER是0,则传输速率增加一倍。
上述的 DRC算法非常简单,并且能很容易实现。简单DRC算法可以考虑使用与上述不同的门限方式,例如FER<20%,速率增加;FER>60%,速率减半。简单DRC算法的主要特点如下:
①FER主要由数据传输子层统计得到,MODEM不提供任何底层的传输参数,作为DRC依据;
②简单 DRC算法的主要缺点是可能造成速率震荡,会带来算法的调整延时;
③该算法的主要优点是实现简单,FER由数据传输子层统计得到,与MODEM之间相对独立。
2.2 快速DRC算法
2.2.1 快速DRC算法描述
快速DRC算法的目的是保证在两个5066节点之间的链路上有最佳的传输吞吐量。依据当前的信道条件选择最优化的传输速率和交织方式能够实现该目的。在速率自适应处理过程中,接收方才能决定是否进行自适应变换。接收方通告发送方,最佳的传输速率与交织方式。快速 DRC算法的输入参数如表1所示。
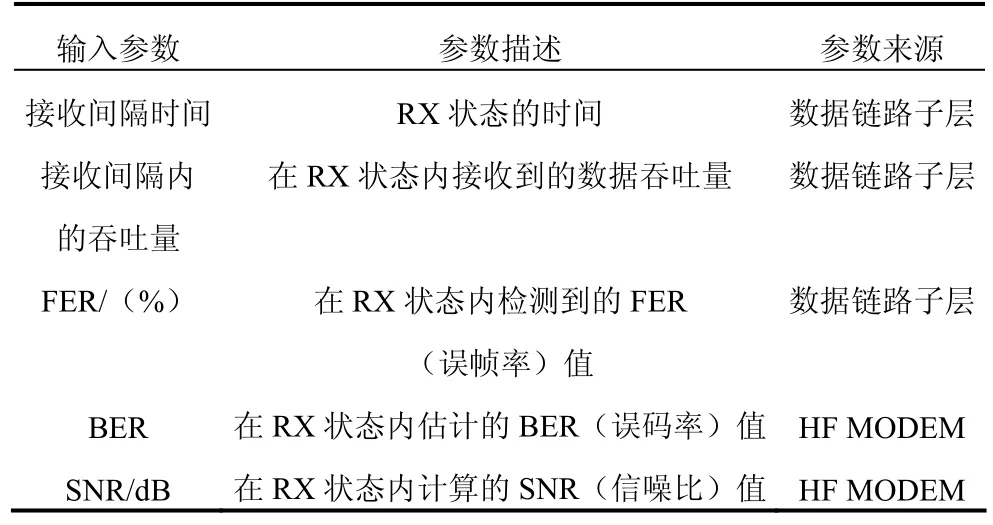
表1 快速DRC算法的主要输入参数
表1中的参数描述可以有效地反应当前信道的条件。“快速DRC算法”通过收集来自于MODEM的统计信息,包括BER和SNR,通过多个信息的统一决策,适应当前信道的实际情况作自适应调整。快速DRC算法的输入输出如图2所示。
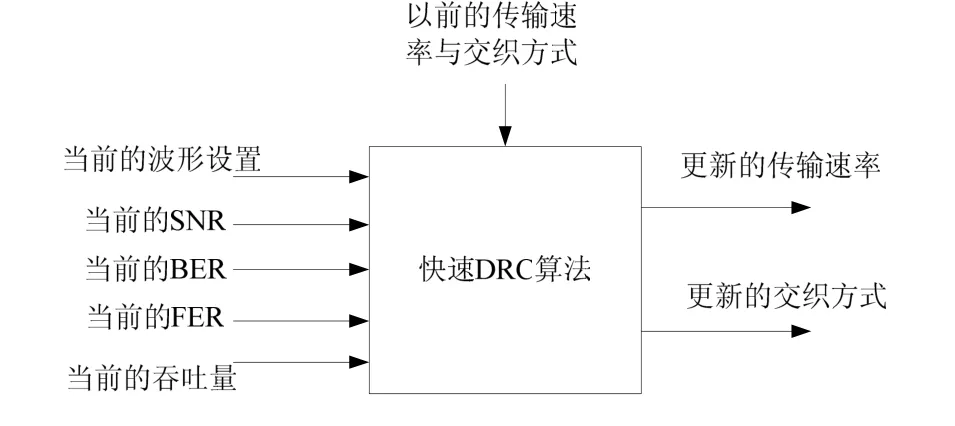
图2 快速DRC算法的输入与输出参数
如图2所示,快速DRC算法的主要策略为:
①由接收端发起DRC流程;
②在接收端的RX阶段分别对吞吐量、BER、FER和SNR进行计算;
③在RX阶段结束时,接收端进行快速DRC算法,计算得出当前更新后的传输速率与相应的交织方式;
④在下一个TX阶段之前,接收端根据DRC算法的结果与发送端进行DRC协商,完成速率的更新;
⑤在下一个TX阶段采用更新后的速率进行传输。
2.2.2 快速DRC算法的特点
根据快速DRC算法的处理流程,可以得出快速DRC算法主要有以下特点;
①快速DRC算法将BER引入速率自适应的门限设计,性能更优于仅将FER作为门限来调整速率;
②通过多个参数的结合调整速率,更能反映信道的条件,真正做到依据信道条件对传输参数进行自适应调整;
③快速 DRC算法的主要缺点就是实现负载,需要由物理层的MODEM提供参数支持,这样在数据链路子层执行的DRC算法与MODEM的处理并不独立,相互之间有额外的控制开销。
2.3 DRC算法的仿真分析
在点对点的通信情况下,对简单DRC算法与快速DRC算法进行仿真分析。仿真场景考虑使用高斯信道,信噪比从-2~5 dB进行交替变换。传输速率从600 b/s~64 kb/s做自适应调整。其他点对点传输参数在两类算法的仿真中保持一致。仿真结果如图3所示。
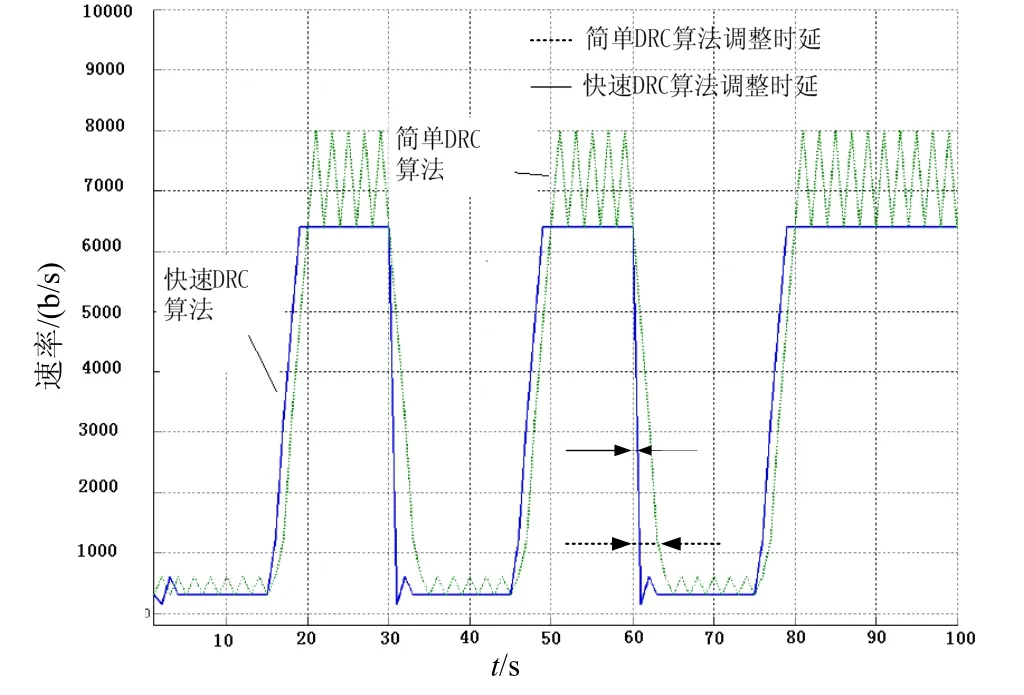
图3 简单DRC算法与快速DRC算法的仿真分析
从仿真结果可以看出,简单的 DRC算法实现简单,但是会造成自适应的调整时延和速率振荡,适合于信道条件相对较好的短波环境。快速 DRC算法实现复杂,需要由MODEM 与数据传输子层协调实现,会带来更好的系统性能,适合于信道条件相对较差的短波环境。因此,对于不同的短波环境,速率自适应的设计应该考虑实现效率与可靠性的折中。
4 结语
北约的 5066标准主要针对短波通信系统提出了标准建议,其中的速率自适应机制作为适应短波信道条件的优化方法,该标准进行了详细的描述。速率自适应技术需要在特定的时间段内根据信道质量状况选择最佳的数据发送速率。5066标准里没有给出明确的速率自适应算法,设计者需要根据短波通信系统的实际情况进行相应的配套设计。同时,速率自适应算法的设计应该以短波信道的质量条件以及网络环境为依据,保证传输的可靠性与实现效率的折中。
[1] 景渊,曹鹏,黄国策.北约短波数据通信标准最新进展[J].舰船电子工程,2009,29(06):24-28.
[2] 张尔扬,王莹,路军.短波通信技术[M].北京:国防工业出版社,2003.
[3] 朱红琛.STANAG 5066标准在短波网络通信中的应用研究[J].通信技术,2009,42(10):87-80.
[4] STEPHAN Schulze.Design and Implementation of a STANAG 5066 Data Rate Change Algorithm for High Data Rate Autobaud Waveforms[D].South Africa:University of Pretoria, 2005.
[5] THOMAS A K, HOLGER Buchholz.STANAG 5066 – Flexible Software/Hardware Solution for the new NATO HF-Communication Protocol[C].USA:IEEE,2002:487-490.
[6] STANAG 5066.Profile for Maritime High Frequency (HF) Radio Data Communications[EB/OL].(2005-05-13)[2011-03-12].http://NATO STANAG 5066 Edition2, 1999.ieeexplore.ieee.org/ iel3/4826/ 13334/00607595.pdf?arnumber=607595.
[7] TRINDER S E, GILLESPIE A F R.Optimization of The STANAG 5066 ARQ Protocol to Support High Data Rate HF Communications[C].China:[s.n.],2000: 482-486.
