基于轨迹图磁阻传感器车辆检测算法
2011-03-06黄景武邹传云陈瑞鑫
黄景武,邹传云,陈瑞鑫
(西南科技大学 信息工程学院, 四川 绵阳 621010)
0 引言
随着社会经济的发展,人民生活水平不断提高,私家车数量剧增,而随着中国城市交通的快速发展,车辆越来越多,伴随着停车场越来越大型化,停车场管理开始趋向于智能化。由于大型停车场面积大,采用人工肉眼来实现每个停车状态监控成本太高,使用视频监控或图像采集分析的方式实现停车位状态的监控虽然减少了人力,但是物检测率高、相当于依赖人的判断、不能实现自动化管理和节约成本。现在普遍使用基于地感线圈的车辆检测,但是该技术有成本昂贵、维护困难和使用寿命短等缺点[1-4]。
地磁传感器是可以检测地磁场信号的新型传感器。地磁传感器可以实时、准确的检测出停车位状态,通过无线传感器网络实时统计每个车位的状态。该系统可实时向驾驶员提供停车场车位状况,可实时向停车场管理人员提供当前的停车场运营情况、每个车位状态,可实现停车场自动统计和智能管理[3-4]。
磁阻传感器在车辆经过时,x轴输出曲线类似于一阶高斯曲线,z轴输出曲线类似于高斯曲线[5-6]。现根据磁阻传感器具有这样的特性,提出基于轨迹图分析的磁阻传感器车辆检测算法。最后通过Matlab仿真检验算法的可行性和正确性。
1 信号分析
车辆对磁场的扰动可看作多个双极性磁铁组成的模型。这样的双极性磁铁模型具有南北的极化方向,这种模型能够反映引起地球磁场的扰动。这样的扰动在汽车发动机和车轮处尤为明显,此外扰动也取决于车辆内部、车顶或后备箱中有没有其他铁磁物质。总之,其综合影响是对地球磁力线的扭曲和畸变[6],如图1所示,这种扭曲也被称作车辆的硬铁影响或干扰。
地球磁场是表示地球磁场方向和大小的物理量,地球磁场的要素有:地磁总强度F、水平分量H、垂直分量HZ、东分量HY、北分量HX、磁偏角D为水平分量H与X轴的夹角,磁倾角I为矢量F与水平分量H的夹角,如图2所示。目前,车辆检测法可根据研究的地磁要素不同分为垂直分量检测法(HZ)和水平分量检测法(包括HX、HY、H、磁偏角D)。
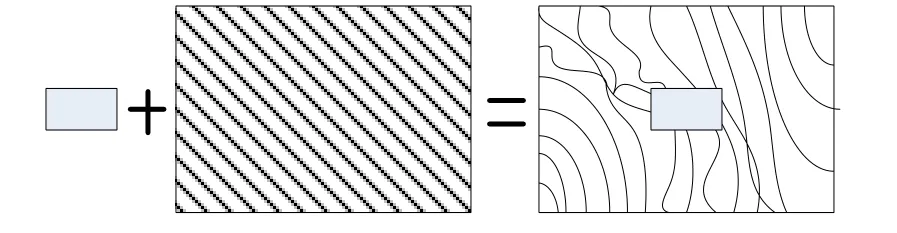
图1 均匀磁场中铁磁物体引起的畸变

图2 地磁要素
这里的地磁检测器X轴为沿车辆行驶方向,Z轴为垂直于路面方向[7],如图 3所示。检测器实际输出曲线[8]如图 4所示,图上半部分为传感器的X轴输出曲线,下半部分为Z轴输出曲线。
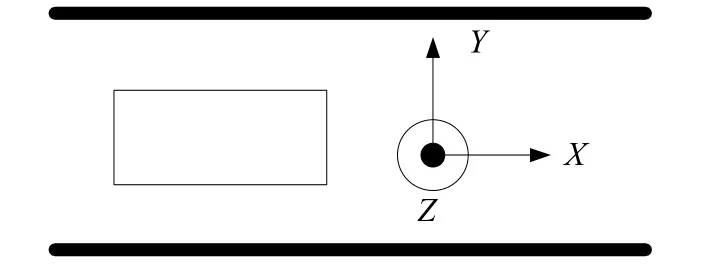
图3 地磁检测器的安装

图4 检测器输出曲线
2 垂直分量算法
2.1 固定阈值算法
该算法通过设定固定的阈值,将采集的地磁序列信号与该阈值比较文献[9]中介绍了该算法:将Z轴方向的地磁信号序列和固定的阈值相比较,一旦连续有 10个信号值大于固定阈值,就认为检测到了车辆,若Z轴和X轴方向的地磁信号序列同时连续在阈值下0.25 s,则认为车辆离开。
由于地磁检测器的应用环境较复杂,容易受到多种因素的干扰,检测的时间序列存在个别的断点和异常值,该算法并不能排除这些断点和异常值的干扰,从而引起车辆的误检和虚警。
2.2 状态机检测法
状态机检测法可通过设定中间状态的方法来消除相邻车位或其他噪声的干扰,增强了算法的鲁棒性。但是状态机算法仅对于车辆何时进入检测区进行判断,并没有判断该车辆何时离开,故容易出现将几辆车误判为1辆。
3 轨迹图分析算法
3.1 轨迹图分析算法分析
轨迹图分析算法是基于检测器输出曲线特性的算法。根据传感器X轴的一阶高斯曲线和Z轴的高斯曲线构造算法,高斯曲线满足式(1):

f(x)满足如图5所示的曲线,f(x)称为正态分布,也称为高斯分布。图4中传感器Z轴的输出曲线形状与高斯曲线很相似。

图5 高斯曲线
f(x)对x求一阶导,整理得式(2),f'(x)如图6(a)所示:

为了方便讨论,f(x)和 f'(x)取 µ=0,δ=1,也就是 f(x)服从标准正态分布;记w(x)= f(x)+ |f'(x)|,则:

式(3)中,f(x)取 µ=0,δ=1。w(x)曲线如图 6(b)所示,w(x)关于纵轴对称,曲线会出现极大值点。轨迹图算法的实现就是将类似于 f'(x)曲线的传感器 X轴输出取绝对值|f'(x)|,之后将类似于f(x)曲线的Z轴输出与|f'(x)|叠加得到类似于w(x)曲线的曲线。通过这样的预先处理,将传感器两个轴的输出转换为具有双峰特性的二维曲线,因为每辆车经过检测器得到的处理曲线都具有双峰特性,把图6(b)称为车辆经过磁阻传感器的检测轨迹图。在图6(b)曲线加一个长度为两个峰值之间采样点的关于采样点的窗函数,通过加窗只保留一个轨迹图的峰值间曲线而去掉其余部分以及非轨迹图干扰部分,图6(b)加窗之后曲线如图7所示。这样就用一个双峰值曲线部分代表有一辆车进入车位或者离开车位。
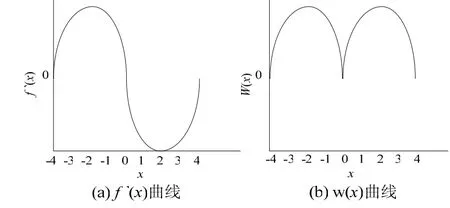
图6 高斯曲线变化
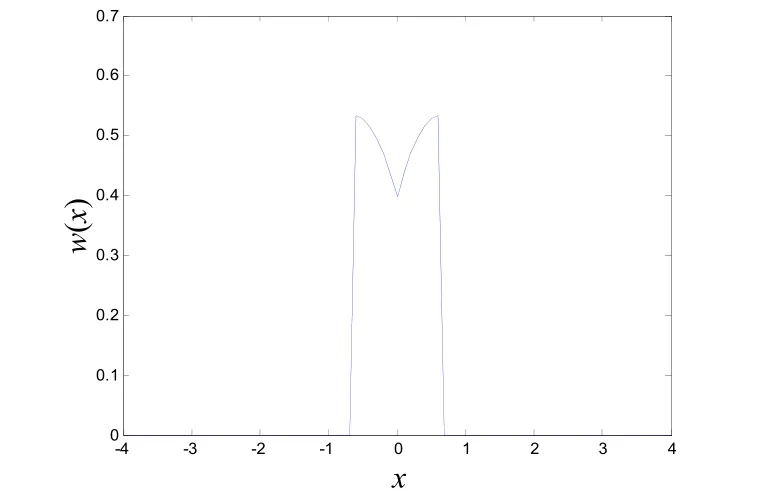
图7 w(x)曲线加窗
3.2 实验结果
在Matlab中构建车辆轨迹曲线数据,模拟间隔不同时间经过检测器的车辆,经过轨迹图算法对数据进行处理得出的仿真结果如图8所示。
从图中可以看出一共有 6辆车次经过检测器,图 8(a)是这6辆车次的轨迹图,而图(b)是加窗后的轨迹图。

图8 用轨迹图算法处理的数据
4 结语
通过理论推导和实验证明基于轨迹图分析的磁阻传感器车辆检测算法可以有效地检测经过检测器,通过计数的方式来确认车位是否有车,当计数为奇数时说明有车进入车位,当计数为偶数时说明车辆离开车位。这一算法能满足当前车辆车位占用状态可靠性和准确性的需要。
[1] 李宁,黄银龙,王占斌,等.双卡技术在涉车系统中的实现研究[J].通信技术,2011,44(01):60-62.
[2] CHEUNG S Y, ERGEN S C, VARAIYA P.Traffic Surveillance with Wireless Magnetic Sensor[C].USA:[s.n],2005: 479-493.
[3] 杨旭,刘小方,张泽奇,等.基于激光测距的导弹发射车定位系统设计[J].通信技术,2010,43(11):52-54.
[4] DUARTE M F, HU Yuhen.Vehicle Classification in Distributed Sensor Network[J].Journal of Paralle Land Distributed Computing, 2004,64(07):826-838.
[5] MICHAEL J C, SMITH C H, BRATLAND T, et al.A New Perspective on Magnetic Field Sensing[DB/OL].[1998-05-01](2010-08-10).http://www.magneticsensors.com.datasheet/new_pers.pdf.
[6] COIFMAN B, DHOORJATY S, LEE Z H.Estimating Median Velocity Instead of Mean Velocity at Single Loop Detectors[J].Transportation Research, 2003,11(03):863-880.
[7] CARUSO C J, WITHAMWASAM L S.Vehicle Detection and Compass Applications using AMR Magnetic Sensors[EB/OL].(1999-05-10)[2010-08-10].http://www.google.com.hk/url?sa=tsource=web&c d=1&ved=0CCQQFjAA&url=http%3A%2F%2Fmasters.donntu.edu.ua%2 F2007%2Fkita%2Fgerus%2Flibrary%2Famr.pdf&ei=-NfhTaGeI5CgvQ Oqi_meBw&usg=AFQjCNGQrp_dtas0O_r4lUeYweRzly2MFw.
[8] CHENG Singyu.Traffic Surveillance by Wireless Sensor Networks:Final Report[C].USA: California PATH Research Report,2007:52.
[9] 潘霓,骆乐,闻育.基于磁阻传感器的车辆检测算法综述[J].计算机工程与应用, 2009,45(19):245-248.
