精彩纷呈的中国首次空间交会对接
2011-03-06博引
□□由于进行了充分的技术准备工作,并制定了科学的交会对接方案,以及各系统精确无误的操作实施,天宫-1与神舟-8在2011年11月1-3日实施的首次空间交会对接过程十分完美,一次对接成功。我国首次空间交会对接分为远距离导引段、自主控制段、对接段、组合体飞行段、再度对接段和分离撤离段实施,可以说既步步惊心,又步步放心。
1 远距离导引段
神舟-8于11月1日入轨后,在测控通信系统的导引下,进行了5次变轨。①在飞行第5圈时,处于远望-6测量船和天链-1的02星覆盖区,神舟-8近地点抬高到260km;②在飞行第13圈时,神舟-8接受数据指令,调整轨道倾角,与天宫-1进入同一轨道面;③在飞行第16圈时,处于远望-5测量船和天链-1的01星覆盖区,神舟-8远地点抬高到330km;④在飞行第19圈时,处于天链-1的02星覆盖区,神舟-8近地点抬高到330km,进一步圆化轨道;⑤在飞行第24圈时,处于天链-1的01星覆盖区,神舟-8轨道进行组合修正,即将前几次的误差进行了一次综合修正。这样,神舟-8就从初始轨道转移到与天宫-1共面的330km高的近圆轨道。在天宫-1飞行第539圈、神舟-8飞行第28圈时,神舟-8位于天宫-1后下方约52km处,神舟-8稳稳地捕获了天宫-1,与其建立稳定的空空通信链路,神舟-8转入自主控制段。

神舟-8首次变轨
2 自主控制段
神舟-8自主控制段的3个阶段
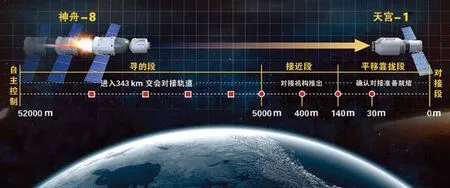
神舟-8的自主控制段又细分为3个阶段,即从与天宫-1相距52km到5km的寻的段;从相距5km到140m的接近段;从相距140m到对接机构接触的平移靠拢段。原定设计是:寻的段飞行时间约70min,接近段飞行时间约62min,平移靠拢段飞行时间约10min30s。在实际飞行中,神舟-8经过55min的飞行,4次轨道机动,到达了与天宫-1相距5km的停泊点;继续飞行85min后,2个飞行器对接机构开始接触。
11月2日23:08,在神舟-8绕地飞行28圈、天宫-1绕地飞行539圈时进入圣地亚哥测控站弧段内,神舟-8在与天宫-1相距52km处转入自主控制,然后用时约140min靠拢天宫-1。从相距52km距离到对接,为了保证每一步准确对接,中间设立了4个停泊点,即进行4次“刹车”,它们分别是5km、400m、140m和30m。
由于空间技术成熟,俄罗斯现在已经没有这样复杂的过程,美国在对接时虽然也有停泊过程,但不像我们有这么多环节。中国航天首次实施交会对接任务,航天专家们还是希望更加稳妥,首先要确保2个飞行器的安全,所以设置了4个停泊点。
·11月3日00:03,在神舟-8飞行第29圈、天宫-1飞行第540圈时,神舟-8进入5km停泊点,停泊4min,地面监视判断它们的状态,此时是在远望-5测量船跟踪弧段内,然后转入接近段。
·11月3日01:03,在神舟-8飞行第30圈、天宫-1飞行第541圈时,神舟-8进入400m停泊点,停泊约2min,地面对神舟-8对接机构的推出和准备情况进行确认,此时是在马林迪海外测控站和天链-1的01星跟踪弧段内。

神舟-8进入寻的段示意图(神舟传媒/制)
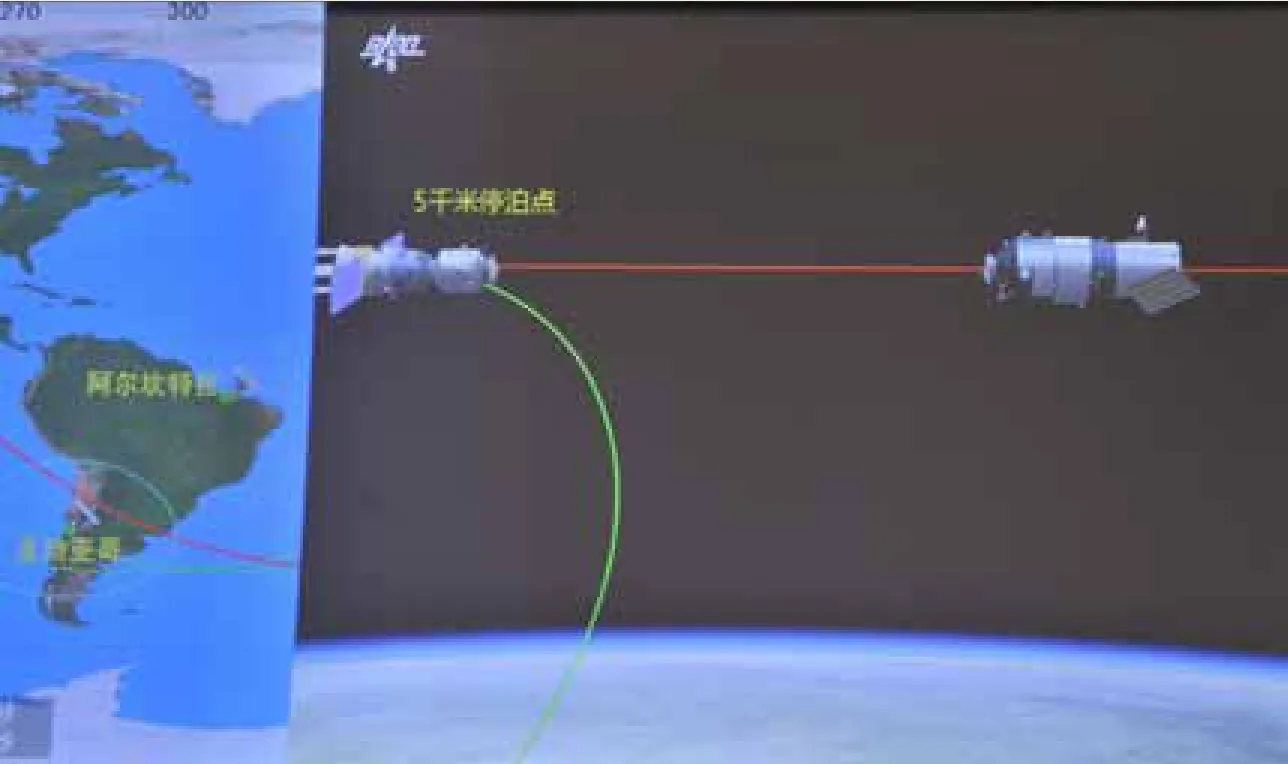
神舟-8进入与天宫-1相距5km的停泊点

神舟-8进入平移靠拢段时CCD光学敏感器介入
·11月3日01:16,在神舟-8飞行第30圈、天宫-1飞行第541圈时,神舟-8进入140m停泊点,停泊约2min30s,地面对神舟-8对接机构准备情况进行确认,此时是在卡拉奇测控站和天链-1的01星跟踪弧段内,然后转入平移靠拢段。
平移靠拢段指的是从140m停泊点到对接机构接触这一飞行段。在从140m停泊点到30m停泊点过程中,神舟-8沿直线接近天宫-1,速度约为0.5m/s。
·11月3日01:22,在神舟-8飞行第30圈、天宫-1飞行541圈时,神舟-8自主进入30m停泊点,停泊2min,地面监视判断神舟-8的状态,对对接准备情况进行最终确认,此时是在天链-1的01星和东风测控站跟踪弧段内。
课外阅读书目,可结合教材选篇推荐,可选择与教材内容紧密相关作品,可选择与作者所处时代接近作品,可选择与教材选篇主题相似不同时代作品。目的在于加深学生对教材选文所代表作品的理解,提升学生阅读积淀,培养学生文学鉴赏能力。在教学某篇作品前后,推荐相应作品。学习《再别康桥》,推荐阅读岳南反映民国文人心路历程的《南渡北归》;学习《故都的秋》,推荐阅读《郁达夫散文选》《郁达夫小说选》;学习《采薇》前,推荐阅读祝和军《大秦帝国的野蛮成长》前二卷;学习《边城》前,推荐阅读体现沈从文爱情观点的《三三》《媚金、豹子与那羊》等小说。从比较阅读角度,再推荐阅读同写爱情的川端康成的《伊豆的舞女》、张承志的《黑骏马》。
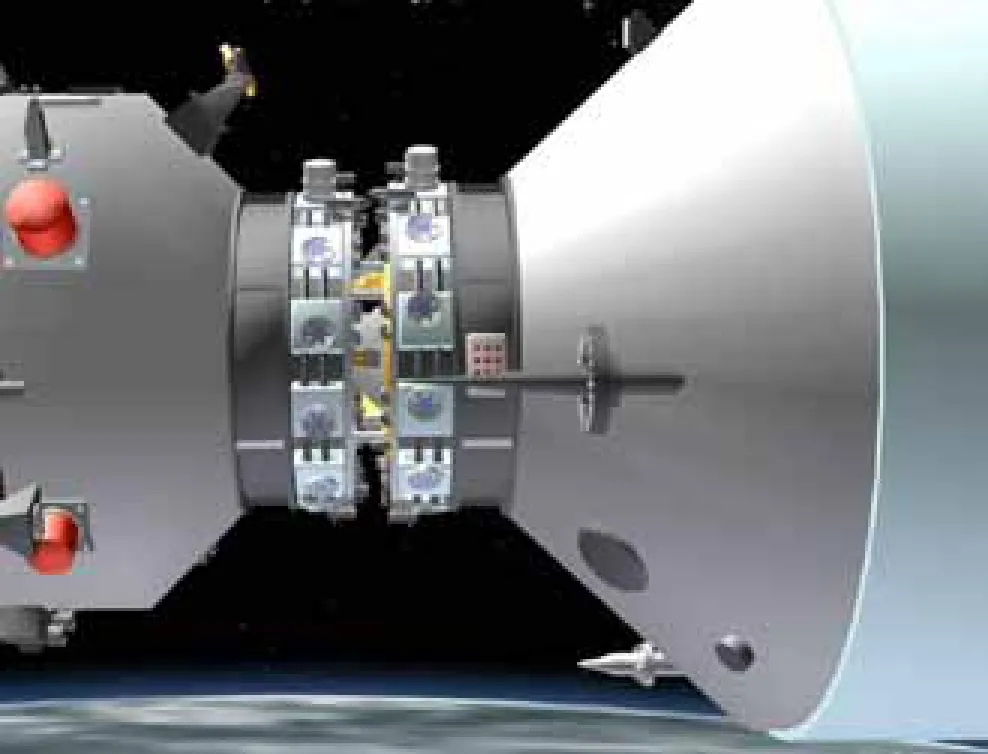
然后,神舟-8以0.2m/s的速度驶出30m停泊点,与天宫-1对接机构接触,平移靠拢段结束,神舟-8自主控制段也结束,转入对接段。
在这4个停泊点中,5km停泊点最重要。对于2个飞行器来说,它是一个相对安全的距离。其次是30m停泊点,就像临门一脚,此时多个发动机同时工作,把2个飞行器拉过来,接合到一起,所以这个点应该说是技术含量最高的。140m停泊点也很关键,在此处要测试对接机构传感器,从而确定神舟-8的对接状态是否已经到位。
从相距52km直至交会对接,作用距离较远的微波雷达率先工作;进入20km后,精度较高的激光雷达开始工作;进入100m时,使用更加精确的CCD光学敏感器。这3台交会测量设备完全由我国自主研制。

神舟-8拍摄的天宫-1(视频截图)

神舟-8伸出对接机构准备对接示意图
3 对接段

神舟-8向天宫-1最后靠拢(视频截图)
通过位置精度控制和交会测量设备状态确认,神舟-8和天宫-1在我国甘肃、陕西上空用约8min完成了捕获、缓冲、拉近和锁紧4个过程。11月3日01:28,在神舟-8飞行第30圈、天宫-1飞行541圈时,进入东风测控站跟踪弧段内。对接环接触,进入捕获锁紧程序,地面严密监视对接机构的锁紧状态。此后,神舟-8对接口上的4只插座与天宫-1对接口上的4只电连接器对接上后,2个飞行器实现了刚性连接,形成组合体。
11月3日01:36,在神舟-8飞行第30圈、天宫-1飞行541圈时,交会对接圆满成功。当2个飞行器锁紧后已经飞行至太平洋中部远望-3测量船的上空,这时自主交会用的激光雷达、微波雷达、空空通信机等相关设备关机。
不过,实际过程很复杂。据专家介绍,当神舟-8和天宫-1相距仅几十厘米时,在它们的速度、位置、姿态、偏差等11个参数满足对接的初始条件后,神舟-8在惯性作用下继续前进,与天宫-1轻轻相触。当感应装置感受到接触,飞船尾部4台发动机随即点火,“捕获”后旋即关机,紧接着相继展开缓冲、校正、拉近、拉紧、锁死等一系列动作,有上千个齿轮和轴承同步动作,从而组成了刚性连接的组合体。在这个过程中,既要防止“牵不上手”,又要防止“追尾事故”。神舟-8和天宫-1的相对速度需控制在0.2m/s,神舟-8的前进速度比天宫-1略胜一筹,在交会对接时,它比天宫-1的飞行速度略快0.2s。具体过程分为以下8个步骤。
第一步:“相撞”。11月3日01:28,在惯性作用下,神舟-8与天宫-1对接环以0.2m/s左右的速度轻轻接触,神舟-8尾部4台发动机随即点火,推动飞船钻进天宫-1的怀抱,对接过程正式开始。
第二步:“捕获”。11月3日01:29,当神舟-8主动对接机构上的对接环接到失衡传感器发出对接指令信号后,6根滚珠丝杆就会向外推出200mm,对接环上安装的3对捕获锁撞到天宫-1被动对接机构相对应的卡板器上,捕获锁与卡板器互相咬合,被牢牢卡住,2个飞行器对接机构顺利捕获,实现柔性连接,飞船发动机旋即关机。

神舟-8与天宫-1“相撞”示意图(神舟传媒/制)

神舟-8“捕获”天宫-1示意图
第三步:“缓冲”。11月3日01:30,神舟-8对接机构机械缓冲系统开始工作,储存和消耗能量。其对接环受到撞击后通过一套传动机构,联向对接机构上的摩擦自动器和电磁阻尼器,分别吸收纵向和横向的撞击能量,进行缓冲。碰撞、捕获和缓冲3个步骤共用时约60s。
第四步:“校正”。11月3日01:31,当神舟-8成功捕获天宫-1并实施缓冲后,神舟-8对接环的6根滚珠丝杆继续往外推至300mm,同时对2个飞行器的姿态、位置和偏差等进行强行校准,校准用时约80s。
第五步:“拉近”。校准后,神舟-8对接环的6根滚珠丝杆缓缓收缩,将2个飞行器“拉近”,将天宫-1轻轻“拥入怀抱”,这一过程用时约240s。
第六步:“拉紧”。在神舟-8和天宫-1的对接面上,分别安装了12对结构锁,每把结构锁的拉力达3t。当2个飞行器被拉近后,2个对接面的12把结构锁一一相扣,将二者紧紧粘连。在天宫-1与神舟-8的对接机构中,还各有3个完全对称的捕获锁,当捕获锁出动,二者两两合在一起时就能依附在一起,就似门的撞锁相扣,实现2个飞行器最初的捕获、连接和定位。
第七步:“密封”。在2个飞行器拉紧后,对接机构上的驱动电机将带动钢丝绳系统将2个连接器面上的密封圈压缩,保持密封。
第八步:“刚性连接”。通过对接锁使2个连接器贴合,使天宫-1上的4只直径为3.8cm的电连接器插头准时插入神舟-8对接口上的4只插座,实现“刚性连接”,将2个飞行器组合成一体。拉紧、密封和刚性连接共用时220s。

神舟-8与天宫-1“缓冲”示意图
神舟-8与天宫-1“拉近”示意图
从接触到最后的锁紧仅用了约8min,比原计划缩短了7min。神舟-8和天宫-1实现“刚性连接”后,通过制动控制系统,接通2个飞行器的电、气、液路通道,进行信息和能源并网。
第1次对接的整个过程处于夜间,即太阳光无法照射的地球阴影区,肉眼很难看到,只能通过专业手段进行观测。这是由于在地面无法完全模拟太空中的阳光强度,为了避免强光对测量设备的干扰,所以首次交会对接选在地球阴影区进行。

天宫-1和神舟-8锁紧完成(视频截图)
第1次、第2次对接都是在我国甘肃、陕西上空进行,主要是因为这两地的地面测控站分布比较密集,属于搭界弧段,可实现测控全可见。同时,这两地又处于天链-1的01星和02星中继卫星的覆盖弧段,能够保证神舟-8和天宫-1从相距140m的停泊点,到最终的靠拢锁紧段,整个过程都在我国测控范围内。这样一旦出现紧急情况能够及时进行测控,第一时间进行处理,从而保证各类操控的可靠性。
4 组合体飞行段
在这一飞行段,由天宫-1负责组合体飞行控制,神舟-8处于停靠状态,但如果出现故障,神舟-8则可以立即进行“替补”。组合体内部环境的统一控制是未来载人空间站运行的重要技术。虽然因无人参与,这次试验对大气环境不进行验证,也不打开舱门,但2个飞行器之间的通道是否畅通至关重要。
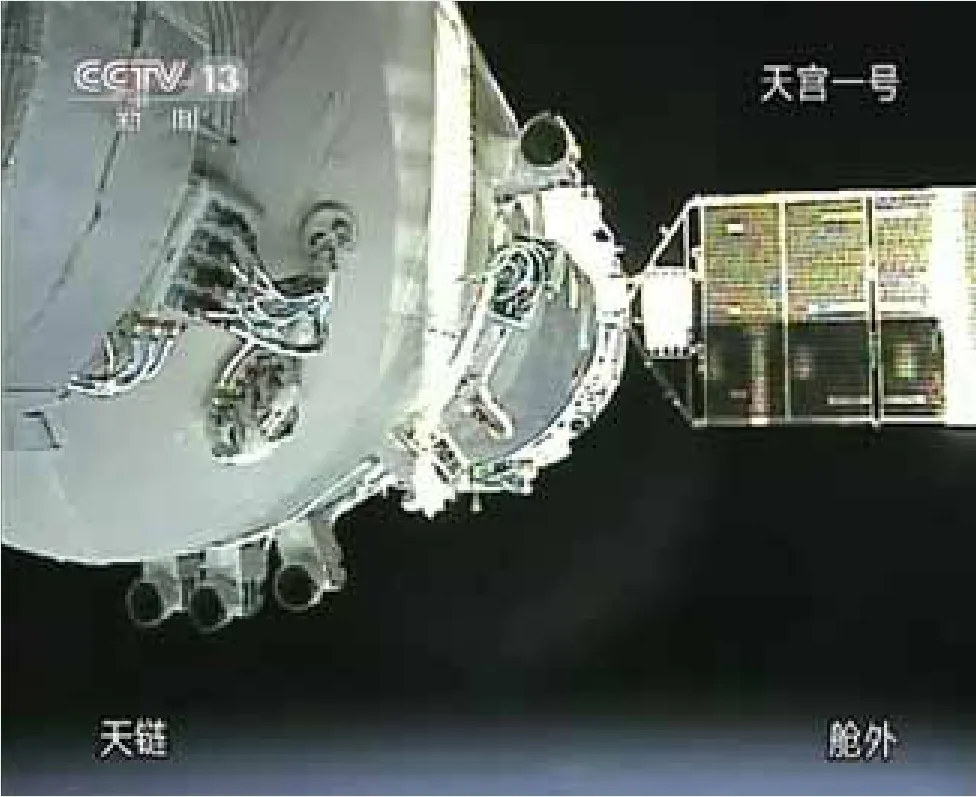
天宫-1摄像头拍摄的天宫-1和神舟-8对接锁紧完成后的画面(视频截图)
5 再度对接段

组合体在飞行12天后,于11月14日成功进行了分离和第2次交会对接试验。其主要过程为:组合体先转身180°,然后对接机构解锁,2个飞行器分离,神舟-8撤离至与天宫-1相距140m处停泊,按程序进行了第2次交会对接,再次构成组合体。其目的是再次验证交会对接技术及对接机构等部件工作的可靠性与稳定性,为未来的神舟-9、10载人手动对接打下基础。这样可以增加空间试验的子样,以获得最大的效益。第1次对接是在地球阴影区进行,由于没有太空中强光的影响,交会对接非常顺利。为了充分验证测量设备的抗干扰能力,第2次交会对接在光照区举行,以考察测量设备在光照干扰下的工作情况,为以后载人手动对接做准备。这一做法有其合理性、经济性,但同时也存在风险,然而我们成功了。
6 分离撤离段

天宫-1-神舟-8组合体在轨运行示意图(神舟传媒/制)

天宫-1与神舟-8交会对接任务全过程
再次对接的天宫-1与神舟-8组合体继续飞行2天后,于11月16日进入分离撤离段。2个飞行器再次分离,分离后神舟-8缓缓转身180°,从而与天宫-1行驶方向一致,同时加速飞行。神舟-8撤离至与天宫-1相距5km以外的安全距离时,交会对接试验结束。11月17日,神舟-8返回舱返回内蒙古主着陆场。
2个飞行器能否正常分离与能否正常对接一样重要,一旦无法分离,未来载人航天器上的航天员就可能面临巨大风险。根据程序设计,对接锁可自动分离,锁紧机构依次解开后,2个对称的弹簧提供了初始推力,神舟-8离开天宫-1,慢慢飞远,直至撤至安全距离,神舟-8发动机点火,加速离开。自动分离一旦出现故障,也可以进行手动分离,将2个对接机构掰开;此外,还可以采用火工品将对接机构炸开,实行强行分离。
对接机构上的12把结构锁,每个锁的拉力都是数吨级。为了确保分离,采取了4重备份。神舟-8锁钩自动解锁失效时由天宫-1锁钩解锁;如果仍然不行,则先用火工品炸断神舟-8锁钩;仍然无效时,最后的选择就是把天宫-1的锁钩炸毁,如果发展到这一步,天宫-1的对接机构将永远失效,无法迎接下一艘飞船。
神舟-8撤离返回后,地面控制对天宫-1进行2次轨道机动,将其从337km的对接轨道抬升到约382km的自主飞行长期管理轨道,等待下一次交会对接。382km这个高度是根据2012年发射神舟-9的发射窗口计算得出的,届时天宫-1将通过自然衰减,轨道高度将降到约343km。■
