航管二次雷达数据处理
2011-03-05贾坤
贾 坤
(中国西南电子技术研究所,成都 610036)
航管二次雷达使得管制员直接在雷达屏幕上得到飞机的全部有关数据,极大改善了空中管制环境,提高了管制效率,但对航管二次雷达数据处理变得更加困难。文献[1]主要解决了一次雷达数据处理功能和流程,文献[2]研究了一次雷达和二次雷达的数据处理。虽然雷达数据处理有共性的地方,但是数据处理离不开雷达本身的工作模式。本文研究了采用模式多目标询问时序编排技术[3]实现对同一波束内多个S模式目标的选址询问和监视下的数据处理模块设计和跟踪技术。
1 航迹处理功能划分
根据航管二次雷达工作原理,其数据处理功能相应划分为以下几种模块。
1.1 数据接收网络模块
该模块完成接收数据,并对数据进行解包,去除异常数据。在Vxworks系统中作为一个独立的任务[4],能够实时地接收到数据。该任务如下:
task Spawn(“SsrReceive-Ni” ,101,0x0008,200000(FUNCPTR)SsrReceiveMcastRR,mysocket2,0,0,0,0,0,0,0,0,0)
其中,mysocket2为网络端口号。
1.2 数据预处理模块
该模块主要完成二次雷达工作模式的区分、数据存储结构体的初始化、相同目标数据的合并等,使得处理完后的数据能够满足后面模块航迹关联的需要。
1.3 航迹关联模块
该模块包括目标点迹和点迹关联、目标点迹和航迹关联,其中点迹关联是在雷达刚开机没有系统航迹情况下进行的,点航关联是在航迹建立后跟踪阶段和存在系统航迹下新目标的加入情况下进行的,该模块是整个航迹处理的关键部分,通过使用关联策略[5],可以很好地去除目标反射和干扰。根据二次雷达信号处理端发送数的特性,每过一个扇区就会发送该扇区内目标信息,依照接收特性把目标航迹关联按照雷达扇区划分方法对监视空域划分。下面介绍该处理方法和带来的好处。假如考虑二次雷达扫描一周需要4 s,如果二次雷达扫描一周做一次航迹关联,对于速度较慢的目标来说影响不大,但是对于S模式跟踪说,这样的处理方法不能满足实时性,如果是使用滞后3个扇区的办法,其设计方法为:假设天线转动为顺时针,走到10号扇区时,开始处理7号扇区的数据,如图1所示。这样,7号扇区中的目标关联只跟6号、7号、8号扇区中的系统航迹关联,因此可以节约航迹查找时间,并且在10号扇区是就对7号扇区中航迹进行管理和维护,不需要等到天线扫描完一周,提高了目标跟踪的效率。

图1 监视空域划分图Fig.1 Dividing surveillance airspace
1.4 航迹管理模块
航迹管理通常是指航迹建立、航迹更新、航迹外推、航迹删除。
所谓的航迹建立是指:如果一个目标连续几次不间断有数据,就认为构成了航迹起始的条件。快速起始认为是:连续3次有同一个目标数据构成航迹起始条件,如果航迹起始成功,就相应地存储到相应结构体中等待下一步的航迹外推。
航迹更新是指:上一时刻的航迹外推和现在时刻的观测数据符合某种规则确认为一个目标,然后对上一时刻外推航迹进行修正和校验,得到该时刻的准确航迹。
航迹外推是指:利用现有的目标信息外推下一时刻目标的航迹。
航迹删除是指:目标连续几个时刻不出现的情况下,就认为是目标消失或者目标跟丢。
其中航迹更新和外推使用滤波器来完成,本文考虑到民航飞机的起飞和降落阶段的跟踪使用了交互多模型(IMM)滤波算法,对接收到前端二次雷达信号处理发送过来的数据,采用的滤波模型有CV、CA和当前统计模型,利用交互多算法的思想,把CV、CA和当前统计模型组合成为目标物理运动的数学多模型,利用交互多模型算法求解该数学模型,假设不同模型之间的转移服从已知转移概率的有限态马尔科夫链,考虑多个模型的交互作用,以此得出目标的状态估计。交互多模算法[6]示意图如图2所示。

图2 交互式多模型算法示意图Fig.2 Illustration of IMM algorithm
交互式作用器利用模型概率和模型转移概率来计算每一个滤波器的交互输入估计 Xoj(k-1 k-1),3个滤波器各自利用最新的量测数据Z(k)和交互输入估 Xoj(k-1 k-1)计算出一个新的估计Xj(k k)和模型的可能性向量 Λ(k),然后前一时刻的模型概率u(k-1)、模型可能性向量 Λ(k)、模型转移概率u(k-1)(i j)被用来计算新的模型概率u(k),最后总的状态 X(k k)就可以通过新的状态估计 Xj(k k)以及相应的模型概率 u(k)计算出来。简单来说就是混合、滤波、概率更新、合并这样一个反复循环的过程。
1.5 数据框图
根据雷达工作方式(A/C模式询问、S模式询问和A/C模式S模式轮询),由于不同模式下雷达信号层输出的数据不同,根据下面的处理流程和滤波算法得出包含有两种询问模式下的目标航迹,如图3所示。

图3 数据框图Fig.3 Block diagram of data
2 航迹处理流程
如图4所示,该流程主要包括数据解包、预处理、航迹起始、航迹关联、航迹更新、航迹预测、航迹维护功能,针对不同目标数据特点(雷达询问模式)分别建立目标信息处理分支,尽可能地考虑目标数据的特点。
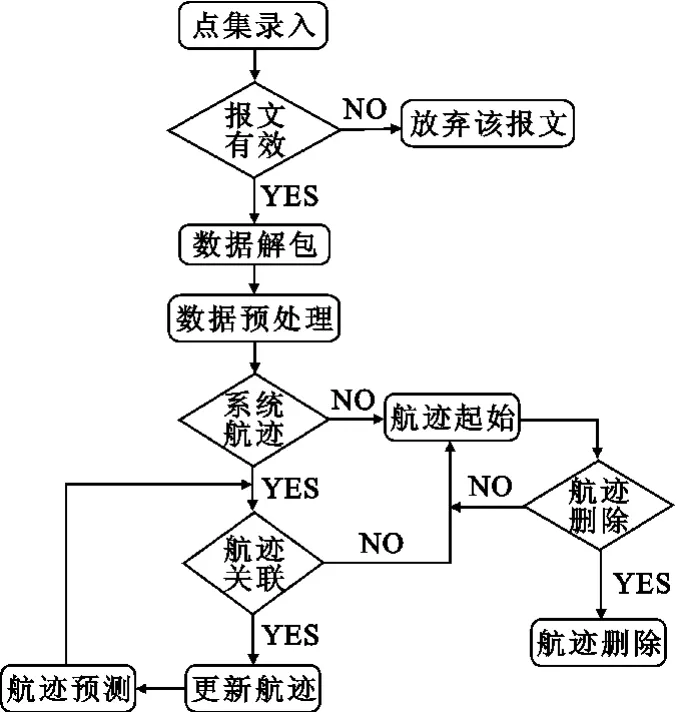
图4 航迹处理流程图Fig.4 Flow chart of track processing
3 外场试验效果图
本次外场选在成都某地,对空中的民航飞机进行了实际数据采集,使用了A/C模式、S模式[7]和A/C和S组合模式进行了询问,通过航管显示电脑截图如图5和图6所示。
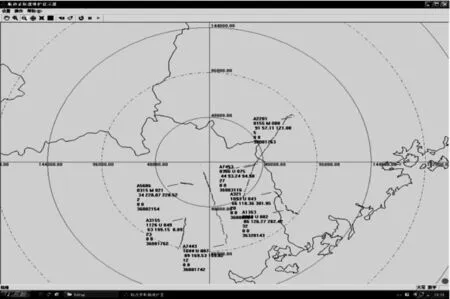
图5 外场混合模式询问实验图Fig.5 Outfield test of mixed mode inquiry
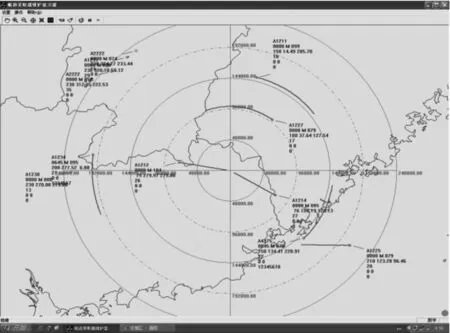
图6 外场A/C模式询问实验图Fig.6 Outfield test of A/C mode inquiry
图5和图6说明了雷达数据处理模块的划分合理性。此外,空中客机过雷达天线的正北时能够持续稳定跟踪,通过外场实际试验可以看到民航飞机的3A地址码和S模式地址码。
4 结 论
已有的雷达数据处理主要针对二次雷达的一种模式下的处理。本文研究了A/C和S模式组合工作模式下,航迹处理进行了模块划分和航迹处理流程设计,并在Vxworks嵌入式操作系统上实现。通过外场试验验证了该航迹处理功能模块划分和航迹处理流程的合理性。但是在目标超过一定数量时,该航迹处理模块不能够满足目标跟踪的任务。此外,当目标大量存在干扰情况下,该航迹处理模块会产生虚假目标,其关键技术有待进一步研究。
[1]何友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2009.HE You,XIU Jian-juan,ZHANG Jing-wei,et al.Radar Data Processing and Application[M].Beijing:Publishing House of Electronic Industry,2009.(in Chinese)
[2]刘宇,聂健荪,李永宁,等.一种一二次雷达航迹相关的算法[J].中国民航飞行学院学报,2011,14(2):17-20.LIU Yu,NIE Jian-sun,LI Yong-ning,et al.A Track Relation Algorithm for Primary/Secondary Radar[J].Journal of China Civil Aviation Flying College,2011,14(2):17-20.(in Chinese)
[3]王亚涛.空管二次雷达S模式询问机目标捕获与监视实现方案[J].电讯技术,2010,50(7):71-76.WANG Ya-tao.Target Capture and Surveillance Method for Mode S Air Traffic Control SSR Interrogator[J].Telecommunication Engineering,2010,50(7):71-76.(in Chinese)
[4]Vxworks程序员指南[M].王金刚,高伟,苏琪,等,译.北京:清华大学出版社,2003.VxWorks Programmers Guide[M].Translated by WANG Jin-gang,GAO Wei,SU Qi,et al.Beijing:Tsinghua University Press,2003.(in Chinese)
[5]万洪容,赖作美,刘晖,等.S模式二次雷达询问机航迹录取技术研究[J].舰船电子工程,2010,30(5):74-78.WAN Hong-rong,LAI Zuo-mei,LIU Hui,et al.Research on Flight Path Generation Technology of Mode Sfor Secondary Surveillance Radar(SSR)Interrogator[J].Ship Electronic Engineering,2010,30(5):74-78.(in Chinese)
[6]康耀红.数据融合理论与应用[M].西安:西安电子科技大学出版社,1997.KANG Yao-hong.Data Fusion Theory and Application[M].Xi′an:Xidian University Press,1997.(in Chinese)
[7]兰鹏.S模式与军用敌我识别[J].电讯技术,2006,46(3):139-143.LAN Peng.Mode S and Military IFF[J].Telecommunication Engineering,2006,46(3):139-143.(in Chinese)
