10 kV馈线快速保护方案
2011-03-04于立涛朱中华王文龙
于立涛,朱中华,王文龙
(1.青岛供电公司,山东省青岛市,266002;2.南京南瑞继保电气有限公司,南京市,211102)
0 引言
2009年底,青岛被国家电网公司列为配电自动化试点建设城市之一。目前,馈线自动化系统(feeder automation,FA)能够隔离故障区域、恢复受故障影响的健全区域供电,对于提高供电可靠性,减小停电面积、缩短停电时间具有重要意义[1-4]。另外还有依靠智能开关设备(重合器和分段器)的相互配合达到隔离故障和恢复健全区域供电的方式[5-7]。青岛供电公司本次试点区域将采用2种模式来实现不同区域线路的馈线自动化:一是集中型全自动FA。主站根据各配电终端检测到的故障报警,结合变电站、开闭所等的继电保护信号、开关跳闸等故障信息,启动故障处理程序,确定故障类型和发生位置。采用声光、语音、打印事件等报警形式,并在自动推出的配网单线图上,通过网络动态拓扑着色的方式明确地表示出故障区段,根据需要,主站可提供事故隔离和恢复供电的1个或2个以上的操作预案,辅助调度员进行遥控操作,达到快速隔离故障和恢复供电的目的[8-11]。二是智能分布式FA与配网自动化相结合。配电终端之间通过相互间通信确定故障区域,然后快速实现故障区域的精确隔离,配电终端再将故障定位和隔离的结果上报给配电主站,配电主站根据终端上报的故障信息来恢复非故障区域的供电。
本文以青岛配网自动化试点工程为基础,分析了智能分布式FA与配网自动化相结合的方案,对方案的实施和保护动作逻辑进行了分析说明,提出了一种基于光纤快速通信实现10 kV馈线快速保护的方案。
1 通信模式与馈线终端单元的联络关系
为实现馈线网络保护,馈线终端单元(feeder term inalunit,FTU)与相邻的FTU之间要具备点对点通信的能力,建立横向通信联络,采用以太网接口,通信介质为光纤,实时交互馈线网络保护需要的相关信息。
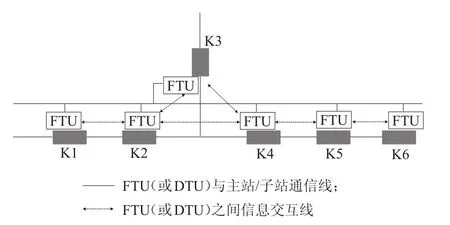
图1 FTU通信图Fig.1 Diagram of FTU communication
对于“手拉手”线路的FTU之间,如图1所示K5与K4、K6开关之间是“手拉手”连接,K5的FTU需要3个通信口,其中K5与K4、K6之间交互网络保护信息需要2个以太网口;另1个网络口负责与主站/子站通信。对于“T”接线路的FTU之间,如图1所示K2、K3、K4之间是“T”接,K2的FTU需要4个通信口,其中K2与K1、K3、K4之间交互网络保护信息需要3个以太网口;另1个网络口负责与主站/子站通信。K4的通信口个数与K2相同。
2 试点区域的改动及技术要求
2.1 现状
变电站侧的10 kV线路开关均为断路器,带二段式电流保护,配置速断21A 0 s过流7A 0.3 s(CT变比:400/5)。架空线路配有重合闸。
架空线路主干线路上安装的柱上开关全部为负荷开关。架空线的用户侧一般采用户内断路器或户外跌落式开关。
2.2 改动及技术要求
变电站侧的10 kV线路保护装置不动,在整定值中取消原电流速断保护(21 A 0 s),保留过流保护(7A 0.3 s)及重合闸功能。过流保护作为全线的远后备。变电站侧10 kV线路原电流速断保护功能由FTU实现,参与该条线路的快速保护处理。要求整条线路任1点的主保护动作延时不大于120ms、后备保护动作延时不大于200ms(均包含断路器机构最大分断故障电流时间70ms),基于光纤通道传递信息,实现全线速动保护。
如果线路上的故障在200ms内未切除,则由原线路保护0.3 s动作切除变电站侧10 kV线路开关。
原负荷开关需要更换为断路器,具备馈线故障电流分断能力。断路器要具备电动操作机构,可通过开闭所终端单元(distribution term inal unit,DTU)或FTU遥控分/合闸。要求其电动操作机构能在70ms时间内分断线路故障电流(从电动操作机构接收到外部分闸电信号开始计算时间)。建议断路器内置三相保护级电流互感器。
要求FTU具备对线路过流故障(两相短路、三相短路)的检测能力;三相涌流检测能力。能准确检测空投变压器、带电动机重合等情况,避免误动;具备馈线网络保护功能,实现馈线的故障区段准确定位,在40ms以内切除区段故障,实现故障隔离(不含断路器机构分断故障电流时间);具备重合闸功能,排除线路上的瞬时性故障;具备近后备保护功能,在故障点临近开关拒动时,由上级开关的FTU近后备保护切除故障。
3 保护动作基本逻辑分析
3.1 F1处故障
配电网结构如图2所示。K6检测到故障电流(开关在合位),K7没有检测到故障电流(开关在合位),故障信息1个有1个无,即认为故障点在这2个开关之间。K5检测到故障电流(开关在合位),K6也检测到故障电流(开关在合位),2个都有故障信息,即认为故障点在这2个开关的区域外。
3.2 F2处故障

图2 配网结构图Fig.2 Structure of distribution network
K6和K7都没有检测到故障电流(开关在合位),2个都没有故障信息,即认为故障点在这2个开关之外。
3.3 F3处故障
K7检测到故障电流(开关在合位),L1没有检测到故障电流(开关在分位),故障信息1个有1个无,即认为故障点在这2个开关之间。
3.4 F4处故障
K1检测到故障电流(开关在合位),K2没有检测到故障电流(开关在合位),K3没有检测到故障电流(开关在合位),3个中只有1个有故障信息,即认为故障点在“T”接点上。
3.5 F5处故障
K1检测到故障电流(开关在合位),K3检测到故障电流(开关在合位),K2没有检测到故障电流(开关在合位),3个中有2个有故障信息,即认为故障点在“T”接点之外。
3.6 F6处故障
K1、K2、K3都没有检测到故障电流(开关在合位),3个都没有故障信息,即认为故障点在“T”接点之外。变电站的出线开关A的FTU检测到故障电流,K1没有检测到故障电流,即认为故障点在出线开关A和K1之间。K1和变电站的出线A开关断开,F6故障被隔离。主站遥控合闸联络开关L1,出线A的非故障区域负荷转由出线B供电。
3.7 F7处故障
K8开关为线路末端开关,如果K8检测到故障电流,直接判定K8下游有故障。是否“末端开关”,可作为装置定值进行整定。
由上述分析可知,以上逻辑对故障的判定并不依赖于故障电流的方向。
4 重合闸投入时的保护逻辑分析
4.1“手拉手”开关重合闸
如图2中F1点故障:K6、K7处的DTU(或FTU)通过馈线网络保护在故障定位完成后,检测到故障电流的K6处DTU(或FTU),先保护动作出口,跳闸K6开关;K7开关先不动作。
在K6合闸储能完成的条件下经固定延时(可整定),重合闸K6。
如果F1为永久性故障,K6处DTU(或FTU)再次检测到故障电流,重合闸后加速动作,直接跳闸K6;在重合闸后加速动作的同时,K6处DTU(或FTU)向K7处发送重合闸后加速动作信息,K7处DTU(或FTU)收到该信息,直接跳闸K7。至此,F1点被隔离。
如果F1为瞬时性故障,K6重合闸后,DTU(或FTU)没有再检测到故障电流,重合闸成功,瞬时性故障排除。
4.2 “T”接点开关重合闸
如图2中F4点故障:K1、K2、K3处的DTU(或FTU)通过馈线网络保护在故障定位完成后,检测到故障电流的K1处DTU(或FTU),先保护动作出口,跳闸K1开关;K2、K3开关先不动作。在K1合闸储能完成的条件下经固定延时(延时可整定),重合闸K1。
如果F4为永久性故障,K1处DTU(或FTU)再次检测到故障电流,重合闸后加速动作,直接跳闸K1;在重合闸后加速动作的同时,K1处DTU(或FTU)向K2、K3处发送重合闸后加速动作信息,K2、K3处DTU(或FTU)收到该信息,直接跳闸K2、K3。至此,F1点被隔离。如果F1为瞬时性故障,K1重合闸后,DTU(或FTU)没有再检测到故障电流,重合闸成功,瞬时性故障排除。
5 防开关拒动逻辑分析
如图2中F1点故障:K6、K7处的DTU(或FTU)通过馈线网络保护在故障定位完成后,K6有故障电流流过,会立即发“故障定位在本处”的信息给临近的K5处DTU(或FTU),K5处DTU(或FTU)即启动近后备保护功能(K5与K6同时检测到故障电流)。
K5临近的DTU(或FTU)在变电站馈线开关处,因为K5不是故障临近点开关,给变电站馈线开关处DTU(或FTU)发送“故障定位不在本处”的信息,不启动近后备保护。
K5从检测到故障电流开始计算时间,在固定时延之后(时间可整定,在本方案中可整定为120ms)仍然检测到故障电流(如K6拒动),近后备保护动作出口,直接跳闸K5开关。K6开关因拒动,DTU(或FTU)会发送“拒动”信息给K7,让K7直接跳闸。
6 应用实例分析
6.1 实例配网接线
35 kV软件园站的10 kV软学线与35 kV辛家庄站的10 kV大学线建立了“手拉手”关系,KG5为联络开关,正常在断开位置,其他开关正常在闭合位置。如图3所示。模拟瞬时性故障,故障点位于KG1与KG2之间;故障前有1A(二次电流)的负荷电流;装置的重合闸功能投入。

6.2 KG1跳闸情况分析
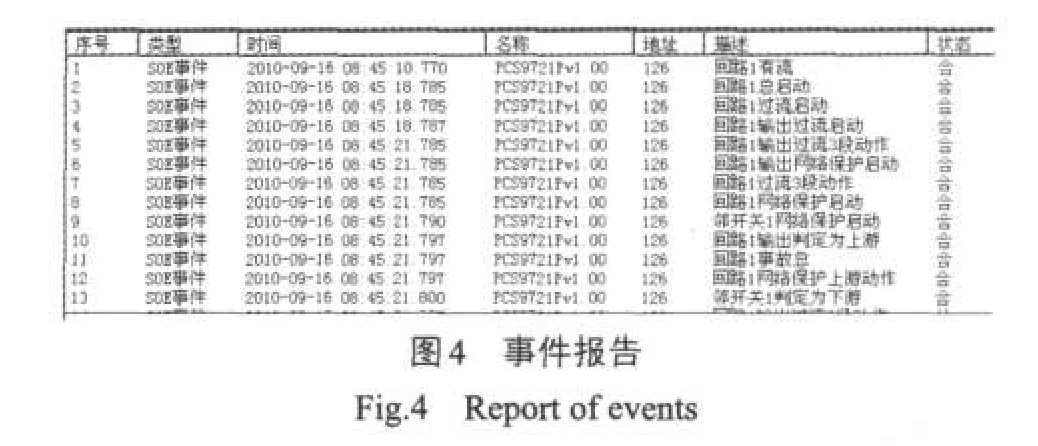
图4为KG1处FTU采集的本装置以及接收到相邻装置保护信息的事件报告,采用各装置SOE事件的相对时标可计算时间差。“回路1”为本回路即KG1,“邻开关”为相邻开关KG2。根据该报告可以看出,序号7的事件为“回路1过流3段动作”时间为08:45:21.785;序号12的事件为“回路1网络保护上游动作”,时间为08:45:21.797,因此,可以看出12 ms KG1判定本侧FTU位于故障点上游并发跳闸命令给KG1断路器。
6.3 KG2跳闸情况分析
根据事件报告可以看出,序号9的事件为“邻开关1网络保护启动”,时间为08:45:21.790;序号13的事件为“邻开关1判定为下游”,时间为08:45:21.800,因此,可以看出10ms KG2判定本侧FTU位于故障点下游,KG2开关不动作。
6.4 试验结果
KG1判定位于故障点相邻上游(简称“上游”),跳闸后重合成功;KG2判定位于故障点相邻下游(简称“下游”),但不跳闸。由于通信采用点对点直接互联方式中间环节仅有光纤,故通道延时可忽略。以上可以看出从保护动作时间12ms加上开关固有动作时间40ms,故障切除时间可缩短到52ms。
7 结论
结合配网自动化的实施,提出了基于光纤通信的馈线快速保护的技术方案。当保护动作时,实现故障的准确定位与隔离的同时,可发送命令到配网自动化主站系统,由主站系统实现网络重构与恢复。本方案是针对青岛地区典型配网供电模式设计的保护自动化解决方案,基于高速的光纤通信网络进行信息传递,自动识别故障位置,准确的隔离故障,经验证这种馈线快速保护动作时间短,选择性好,灵敏度高,解决了继电保护的整定配合问题,为提高配电网的供电可靠性提供了有效的技术支撑。
[1]杨爱民.深圳福永镇配电自动化实施方案[J].电网技术,2002,26(7):84-86.
[2]曹福成,高明,岳金成.大同配电网自动化系统的规划与实施[J].电网技术,2000,24(10):50-51.
[3]徐丙垠.馈线自动化技术[J].电网技术,1998,22(22):54-60.
[4]吴福保,侯保永,李贵民,等.ON2000一体化配网综合调度自动化系统[J].电力系统自动化,2002,26(22):70-73.
[5]张永忠,青志文,邱仕义,等.湖南汉寿城区配电自动化工程[J].电力系统自动化,2001,25(8):65-67.
[6]陈树勇,宋书芳,李兰欣,等.智能电网技术综述[J].电网技术,2009,33(8):1-7.
[7]余贻鑫.面向21世纪的智能配电网[J].南方电力技术研究,2006,2(6):14-16.
[8]郭志忠.电网自愈控制方案[J].电力系统自动化,2005,29(10):85-91.
[9]董新洲,施慎行,王宾,等.新型配电线路自动化模式[J].电力系统及其自动化学报,2007,19(3):1-7.
[10]陈勇,海涛.电压型馈线自动化系统[J].电网技术,1999,23(7):31-33.
[11]刘健,程红丽.配电网的分层及其应用[J].电网技术,2002,26(S):61-63.
