优秀短跑运动员途中跑时下肢关节力矩及肌群功率分析
2011-02-27钟运健刘宇魏书涛李庆
钟运健 刘宇 魏书涛 李庆
1 上海体育学院运动科学学院(上海 200438) 2 南昌大学教育学院体育系 3 清华大学体育部
目前关于短跑时下肢关节动力学的研究,涉及短跑的不同阶段,包括起跑阶段支撑期[1]、加速阶段支撑期[2]及途中跑阶段[3-6]支撑期及途中跑阶段摆动期[7]下肢各关节肌肉力矩变化,也涉及不同水平运动员。上述研究主要采用逆向动力学(inverse dynamics)方法,仅计算下肢各关节净关节肌力矩变化,以此分析各主要肌群的用力规律。由于不同阶段的短跑技术大不相同以及受试者专项、级别不同,故研究结果也不尽相同。此外,短跑是一种极限性运动,支撑期强大的地面反作用力对下肢各关节均同时产生力矩,摆动期下肢快速摆动及各关节快速屈伸和伸屈转换将产生较大的惯性力(还包括科氏力和离心力)作用于各环节,上述各力作用于不同关节所产生的力矩都不可忽视地影响着短跑时下肢各肌群的工作性质[8]。
从肌群功率能量和做功的角度解释人体环节运动的产生和控制,可间接确定关节周围肌群(伸肌群或屈肌群)的活动形式(向心收缩或离心收缩)[9]。上述短跑下肢关节动力学的研究中,少量分析了下肢肌群功率(Muscle Power)[2,4,6,7],但主要集中在加速跑阶段和途中跑的支撑阶段,目前未见综合分析优秀短跑运动员途中跑完整步态下肢各关节力矩(包括肌力矩、外力矩和惯性力矩等)和下肢各关节肌群功率变化的报道。
环节互动动力学(intersegmental dynamics)[8,10]是较新颖的研究方法,它不仅和传统的逆向动力学方法一样可量化分析肌肉力矩,还可量化重力矩、惯性力矩和外力矩对运动的影响及它们之间的相互关系,亦可了解一个环节的运动对系统中另一环节的影响。本研究采用环节互动动力学方法,量化短跑最高速阶段的一个步态中下肢各关节分力矩和关节角度,分析下肢肌群功率,确定关节周围肌群的收缩形式及工作强度,全面分析优秀短跑运动员途中跑时下肢各肌群的工作性质,为短跑专项肌肉力量训练,预防快速跑时下肢肌肉损伤以及伤后康复治疗提供生物力学依据。
1 对象与方法
1.1 研究对象
国家青年男子短跑队暨清华大学短跑队运动员8名,其中国际健将1名,健将3名,一级运动员4名,年龄21.12±1.89岁,身高181.53±3.87 m,体重74.71±4.11 kg,100米跑最好成绩10.56±0.16s。
1.2 实验方法
1.2.1 实验仪器
VICON红外高速摄影系统(英国),摄像头为MX13,采样频率为300Hz,软件版本为WORKSTATION5.1。
KISTLER三维测力台(瑞士),型号9287B,面积为600 mm×900 mm,内置信号放大器,采样频率1200Hz,通过数模转换器连接VICON系统并同步。安放于专门为本次实验在上海体育学院田径场内挖设的测力台坑内。
VISUAL3D分析软件(美国),软件版本为3.91.1。采用此软件对实验数据进行前期处理。
以测力台为中心靠近测试跑道的两端对称架设8台红外高速摄像机,机高约两米,拍摄范围约为9m×2m×2m,将摄像机与VICON工作站连接,设置并标定VICON系统。
1.2.2 实验步骤
运动员充分热身后穿着专用实验服装,并安放标记球。
运动员起跑位置约离测力台40米。运动员听到实验员的口令后全力奔跑,通过拍摄区。同时开启实验设备并采集实验数据。每个运动员需成功采集数据两次。
1.2.3 数据处理
以左脚脚尖触地至左脚脚尖再次触地作为一个完整步态周期,支撑期为左脚脚尖触碰测力台至左脚脚尖离开测力台。
使用Visual3D软件对运动学和动力学数据进行计算与平滑处理。Marker球的轨迹使用Butterworth数字滤波器进行低通滤波,截止频率为17 Hz。
根据Visual3D软件建立骨架模型的要求,将身体分为14个环节。左右髂棘和大转子点分别为骨盆的近端与远端,骨盆近端与远端半径为左右髂棘和大转子点间距离的一半,骨盆深度为0.144 m。膝关节中心定义在胫骨内外粗隆的中点,踝关节中心定义在内外踝中点。身体重心根据每个环节的相对近端与远端的环节重心及环节测量学参数计算获得。计算下肢各关节角度、角速度。
参考刘宇等的环节互动动力学模型[8,10],自主编程计算大腿、小腿、足三环节间的肌肉力矩及三环节间动力交互作用。在该模型内,每个关节的力矩,即关节净力矩(NET)包含重力矩(GRA)、肌力矩(MUS)、惯性力矩(MDT)和外力矩(EXF)。计算公式为NET=MUS+GRA+MDT+EXF。公式中,GRA为重力在关节处产生的力矩,MDT为运动产生的力矩,即环节角速度角加速度在关节处产生的力矩之和,EXF为短跑动作支撑阶段地面反作用力在关节处力矩,MUS为肌肉在关节处产生的力矩。
计算下肢各关节肌肉功率Pj的公式[2]为:Pj=Mj×ωj。公式中,Mj为各关节j活动时主动肌群和拮抗肌群的肌力矩(本文表述为MUS);ωj为关节j的角速度。本文定义,如果关节力矩和角速度为正,则该力矩的作用是伸展关节(其中踝关节为背屈);反之当关节力矩和角速度为负,该力矩的作用就是屈曲关节(其中踝关节为背屈);肌肉功率为正时,代表肌力矩和关节角速度方向相同,肌肉进行向心收缩;肌肉功率为负时,代表肌力矩和关节角速度方向相反,肌肉进行离心收缩。
应用多点三次样条插值法将关节力矩,角度、角速度及肌肉功率数据标准化为完整步态100%中的数据值。使用SPSS10.0软件包对搜集资料进行统计分析。所有数据用均数±标准差( ± s)表示,差异性检验采用配对t检验。P < 0.05表示具有显著性差异,P > 0.05表示无显著性差异。
2 结果与分析
根据环节互动动力学方法,绘图分析受测对象下肢各环节所受力矩分量,取其左腿动作为研究对象。本实验将一个步幅分为支撑和摆动两个阶段,从运动员左脚触地开始称为支撑阶段(临界点为标准化时刻17.7%±1.2%),而从左腿开始摆动称为摆动阶段,其中摆动阶段根据时向不同,以大腿竖直在重心垂线位置为界(标准化时刻55.1%±2.3%),又划分为摆动前期和摆动后期。
分析支撑期下肢各关节的各力矩可见,作用于下肢各关节的力矩主要为外力矩和肌力矩(图1)。外力对于髋关节、膝关节和踝关节的力矩大部分为屈髋、伸膝和背屈力矩,肌力矩则为伸髋、屈膝和跖屈力矩(图2),各关节肌力矩在支撑期主要为对抗外力矩而作正功(图3)。摆动期,作用于下肢各关节的力矩主要为惯性力矩和肌力矩。髋关节肌力矩则主要先后为屈髋和伸髋力矩。而膝关节肌力矩主要先后表现为伸膝力矩和屈膝力矩(图2),惯性力矩是影响大腿和小腿动作的主要动力——肌力矩的主要因素。髋关节和膝关节(尤其是膝关节)肌肉力矩在摆动期的大部分时间均处于做负功状态(图3),为克服惯性力矩而使动作减速和控制动作。

图1 完整步态中下肢各关节角度和角速度(rad/s)变化

图2 完整步态中髋关节(hip)、膝关节(knee)和踝关节(ankle)环节力矩
髋关节在整个支撑阶段持续伸展(图1),地面反作用力在触地初期通过髋关节前方,产生使髋关节屈的外力矩(图2,EXF),伸髋肌群产生伸髋力矩做正功(图2,MUS),最大功率值达1106±231W(图3)缓冲外力矩并使髋关节持续伸展,防止髋关节过度屈曲,而并非仅仅因为“着地瞬间髋关节的伸肌力矩是人体做扒地动作时形成的[3]”,随着地面反作用力通过髋关节后方而产生伸髋力矩,屈髋肌做负功,出现一短暂的肌肉功率波峰。在接下来的直至支撑阶段的中期,伸髋肌群做正功,功率维持在较高水平,最大功率值出现在支撑中期,达2658±937W。

图3 下肢各关节肌群功率(W)变化
以髋为轴的短跑摆动技术其摆动速度的关键在于脚离地后的摆动期大小腿的快速折叠。先前的研究表明,影响大小腿折叠速度和角度的肌群是担负伸髋与屈膝双重任务的各关节肌,在折叠前摆开始阶段,由于髋关节还处于伸展状态,使这些肌肉保持较高的激活水平,造成了屈膝折叠力量的主动不足[2]。而本研究通过量化肌力矩和惯性力矩发现,在摆动前期,作用于膝关节的惯性力矩主要为屈膝力矩(图2,MDT),使小腿屈曲的工作主要是由惯性力矩而不是屈膝肌群(腘绳肌)来贡献动力的。而肌力矩主要为伸肌力矩,做负功(图3)为控制动作及使屈膝动作减速。
摆动后期,虽然髋关节先后经历屈曲和伸展(图1),但惯性力矩始终为屈髋力矩,而为对抗屈髋惯性力矩(图2,INT),并使髋关节屈曲速度减慢及进入下一步的摆动腿快速下压(伸髋),肌肉力矩也一直表现为伸髋力矩(图2,MUS),伸髋肌群先后为髋关节活动的拮抗肌(离心收缩)和主动肌(向心收缩),分别为髋关节活动做负功和正功(图3)。伸髋肌群在摆动后期先后出现正功率峰值(3996±1120W)和负功率峰值(-1606±781W)。同时,摆动后期伸膝阶段,屈膝肌群做负功,膝关节屈肌群主要表现为屈肌力矩对抗伸展膝关节的惯性力矩,做负功使伸膝动作减速而进入支撑期,并在此阶段达到整个步态膝关节肌群的功率最大值(-2104±572W),故摆动后期为伸髋屈膝肌——腘绳肌易发生拉伤的时相[11,12]。
从整个支撑期各关节的角速度和肌肉功率曲线看(图1),膝关节角速度低于其它关节角速度,故膝关节肌群在整个支撑期功率均处于较低水平,远低于髋关节和踝关节肌群功率值,此与Bezodis研究结果[6]一致。我们认为,膝关节主要作用为保持身体重心高度及将髋关节能量传递给踝关节。虽然Johnson也得出相似结论,但结果略有不同,其研究显示,在支撑前期膝关节肌肉功率值很低,支撑中期出现较高功率,峰值为1544±512W,但逐渐下降至足离地[2]。原因可能是Johnson研究的是加速跑阶段。
支撑期地面反作用力始终通过踝关节前方,故外力矩在整个支撑阶段均为背屈力矩(图2,EFX),而踝关节肌群也仅表现为跖屈力矩,以对抗使踝关节背屈的外力矩输出正功为身体提供动力而保持短跑最高速度阶段的跑速[1]。支撑前期跖屈肌做负功以吸收地面反作用力产生跖屈踝关节的能量,功率峰值为4930±933W。到支撑中期,跖屈肌由离心收缩(做负功)转换为向心收缩(做正功),推进身体进入摆动期。在这个过程中,踝关节跖屈肌群经历伸-缩循环(stretch-shortening cycle,SSC),在缩短之前储存了大量弹性能,有利于蹬伸阶段的动力供给与功率输能[1]。同时,下肢单关节和双关节骨骼肌相结合的解剖结构,有利于肌肉能量从大关节向小关节(近端向远端)传递[13]。从快速跑支撑期各关节的角速度峰值和肌肉功率峰值来看,从近端到远端依次出现角速度峰值和伸肌的正功率峰值。同时,我们还发现支撑期踝关节角速度峰值和肌肉功率峰值明显高于其它关节的速度峰值和肌肉功率峰值(图1,表1,图2),说明优秀运动员很好地做到了髋关节肌肉能量传递给踝关节后加大踝关节对地面的作用而更好地保持跑速。这些研究结果和Johnson分析加速跑和Bezodis分析途中跑支撑阶段的研究结果很相似[2,6]。
短跑及其技术的实质是人体以髋为轴的高速摆动,后蹬只是以髋为轴的摆动运动的继续。快速跑时大部分向前推进力和功率的产生都有赖于髋关节周围的肌群。当运动速度增加时,产生速度的髋关节周围肌群的贡献也在增大,尤其是髋关节在摆动末期的加速下压和支撑初期积极伸髋使身体重心快速越过支撑点而获得更多推进力[14]。我们通过环节互动动力学量化下肢各关节力矩的贡献成分,发现髋关节伸肌在整个支撑期和摆动后期起主要作用,而髋关节屈肌只在摆动前期起主要作用(图2,MUS)。各关节肌群快速做功能力(功率峰值)是优秀运动员取得最佳运动成绩的保证,本研究结果显示髋关节伸肌群功率峰值显著高于髋关节屈肌群,髋关节伸肌群做正功时功率峰值显著高于其做负功时(表2)。这表明短跑途中跑时,伸髋肌群做功能力更重要,尤其是快速主动收缩能力。专项练习应多采用跨步跑等方法[15],以加强伸髋肌群的快速做功能力。
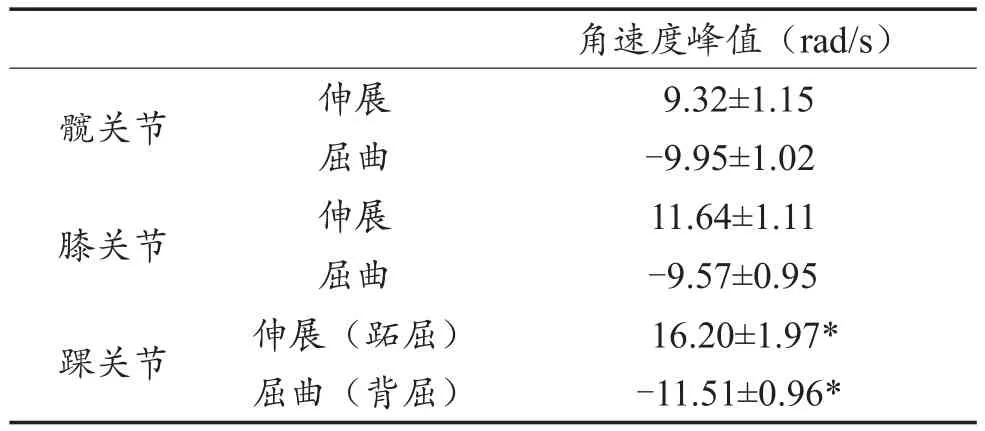
表1 支撑期各关节角速度峰值比较(n = 8)

表2 下肢各肌群功率峰值比较(n = 8)
我们还发现,屈膝肌群在摆动后期伸膝阶段产生屈膝力矩以对抗伸膝的惯性力矩(图2),在此阶段,出现了膝关节肌群在整个步态中做负功功率峰值(标准化时刻78%左右)。表2显示,膝关节屈肌群功率峰值显著高于膝关节伸肌群功率峰值。这说明快速跑膝关节屈肌群的快速做功能力极为重要。膝关节屈肌做负功时功率峰值显著高于其做正功时,提示快速跑时易导致屈膝肌群被动拉伤[11,12,16],应加强膝关节屈肌群的专项练习,尤其是退让性快速收缩能力。
根据足在支撑期的角度变化,我们发现踝关节先背屈后跖屈(图1),踝关节跖屈肌群先做负功,缓冲较大的外力矩,再跖屈做正功伸展踝关节(图3)以产生短跑动力。本研究结果表明,支撑期运动员支撑腿踝关节退让工作时,跖屈肌功率峰值(-4930±933W)显著大于其在蹬伸阶段做正功时(图3,表2)。这说明踝关节跖屈肌群快速做功能力(尤其是快速退让收缩能力)直接影响地面缓冲与蹬伸的效果。此外,运动员在极短的支撑时间内,踝关节角度变化较大(图1)。对于踝关节力量训练应采用速度、力量、幅度为一体的综合性练习方式,即在快速离心力量训练中要有活动幅度练习,在幅度练习时也要有快速离心力量练习,如负重超等长训练等[17]。
分析高速运动状态下的运动动作时,应充分重视施加在身体各环节的外力和惯性力(还包括科氏力和离心力)对肌肉工作性质的影响;以后研究应结合下肢各关节环节各种力矩,进一步定量分析快速跑时下肢各单块肌肉长度、收缩速度及冗余肌力的变化,深入地分析下肢各单块肌肉(群)工作性质,为短跑专项肌肉力量训练提供生物力学依据,进而探讨提高短跑运动员运动成绩的方法。
3 总结
优秀运动员快速跑时,作用于身体各环节的外力(支撑期)和惯性力(摆动期)对各关节肌群工作性质产生重要影响;髋关节伸肌群、膝关节屈肌群及踝关节伸肌群的快速做功能力在快速跑时极其重要,尤其是髋关节伸肌群和膝关节屈肌群的快速主动收缩能力和踝关节跖屈肌群的退让性快速收缩能力是影响短跑成绩的重要因素。
[1] Jacobs R,Ingen Schenau GJv. Intermuscular coordination in a sprint push-off. J Biomech,1992,25:953-65.
[2] Johnson MD,Buckley JG. Muscle power patterns in the midacceleration phase of sprinting. J Sports Sci,2001,19:263-72.
[3] 施宝兴. 短跑途中跑支撑阶段支撑腿关节肌肉生物力学特性的研究. 天津体育学院学报,2006,21(6):495-499.
[4] Belli A,Kyröläinen H & Komi PV. Moment and power of lower limb joints in running. Int J Sport Biomech,2002,23,136-141.
[5] Kuitunen S,Kömi PV,Kyro lainen H. Knee and ankle joint stiffness in sprint running. Med Sci Sports Exerc, 2002,34(1):166-173.
[6] Bezodis IN,Kerwin DG,Salo AI. Lower-limb mechanics during the support phase of maximum-velocity sprint running. Med Sci Sports Exerc,2008,40(4):707-715.
[7] Vardaxis V,Hoshizaki TB. Power patterns of the leg during the recovery phase of the sprinting stride for advanced and intermediate sprinters. Int J Sport Biomech,1989,5:332-349.
[8] 刘宇. 人体多关节运动肌肉控制功能的生物力学分析.台北:中国文化大学出版部,1999. 6-8.
[9] Winter DA. Biomechanics and motor control of human movement. 4nd edn. New York:John Wiley. 2009. 43-45.
[10] Hunter JP,Marshall RN,McNair PJ. Segment-interaction analysis of the stance limb in sprint running. J Biomech,2004,37(9):1439-1446.
[11] Thelen DG,Chumanov ES,Hoerth DM,et al. Hamstring muscle kinematics during treatmill sprinting. Med Sci Sports Exerc,2005,37(1): 108-114.
[12] Yu B,Queen RM,Abbey AN,et al. Hamstring muscle kinematics and activation during overground sprinting. J Biomech,2008,41(15):3121-3126.
[13] Schache AG,Wrigley TV,Baker R,et al. Biomechanical response to hamstring muscle strain injury. Gait & Posture,2009,29:332-338.
[14] Bezodis IN,Salo AIT & Kerwin DG. Joint Kinetics in Maximum Velocity Sprint Running[C]. In H.-J. Menzel and M.H. Chargas (Eds). Proceedings of the XXVth Symposium of the International Society of Biomechanics in Sports,2007,59-62.
[15] 黄达武. 软性塑胶跑道对短跑途中跑及其部分专项力量训练手段技术的影响研究. 武汉体育学院硕士学位论文,2006. 63-68.
[16] Chumanov ES,Heiderscheit BC,Thelen DG. The effect of speed and inf uence of individual muscles on hamstring mechanics during the swing phase of sprinting. J Biomech,2007,40(16):3555-3562.
[17] 井兰香,刘宇,田石榴.不同负重超等长练习下肢各关节作用分析. 体育科学,2009,29(5):50-53.
