车流量检测雷达系统信号处理研究
2011-02-20李秦君党宏社
李秦君, 党宏社
(陕西科技大学电气与信息工程学院, 陕西 西安 710021)
0 引 言
智能交通系统(Intelligent Transportation Systems)是一种基于无线或者有线电子信息技术的新型现代交通系统,它的涵盖范围极其广泛,包括信息技术、数据通讯传输技术、电子传感技术、控制技术及计算机技术等各个领域的先进技术.道路交通信息采集作为输入信息来源应用于智能交通系统中,担负着提供准确可靠信息源以使整个智能交通系统得以顺利准确运行的重任.车流量检测雷达系统作为智能交通系统用于获取路面信息的一种方式,具有非常广阔的应用前景.
车流量检测系统是ITS的一个子系统,是交通管理系统的重要组成部分.它通过数据采集和设备监控等方式,在道路上实时地检测交通量、车辆速度、车流密度和时空占有率等各种交通参数,这些智能交通系统中最基础的参数是道路状况实时监控、出行者动态信息系统不可缺少的基础数据.
1 车流量检测雷达原理及系统组成
车流量检测雷达有正向安装和侧向安装两种方式,应用中多采用从侧向安装的方式设计,这样一套设备可同时检测双向8车道.微波车流量雷达工作在24 GHZ频段,受2 kHz的三角波调制,采用零差型线性调频连续波(FMCW,Frequency Modulated Continuous Wave)体制.实际使用时,检测器被安装在马路边的竖直高杆上,俯向下往各车道发射调频连续波,并接收各车道上车辆反射回来的微波.尽量使得微波传播方向与车辆运动方向达到垂直,以最大程度的减小多普勒频移对车流量统计带来的影响.各车道上车辆和雷达之间距离不同,反射回来的电磁波与当前雷达发射的电磁波频率之差也不同,雷达通过对中频信号进行频谱分析,判断各车道对应频率分量的强弱,从而知道各车道有没有车存在,进一步进行车流量信息统计[1].
在车流量检测雷达系统中,硬件主要由3大部分组成:前端天线射频单元、中频信号处理单元、信号综合处理单元.系统结构框图如图1所示.
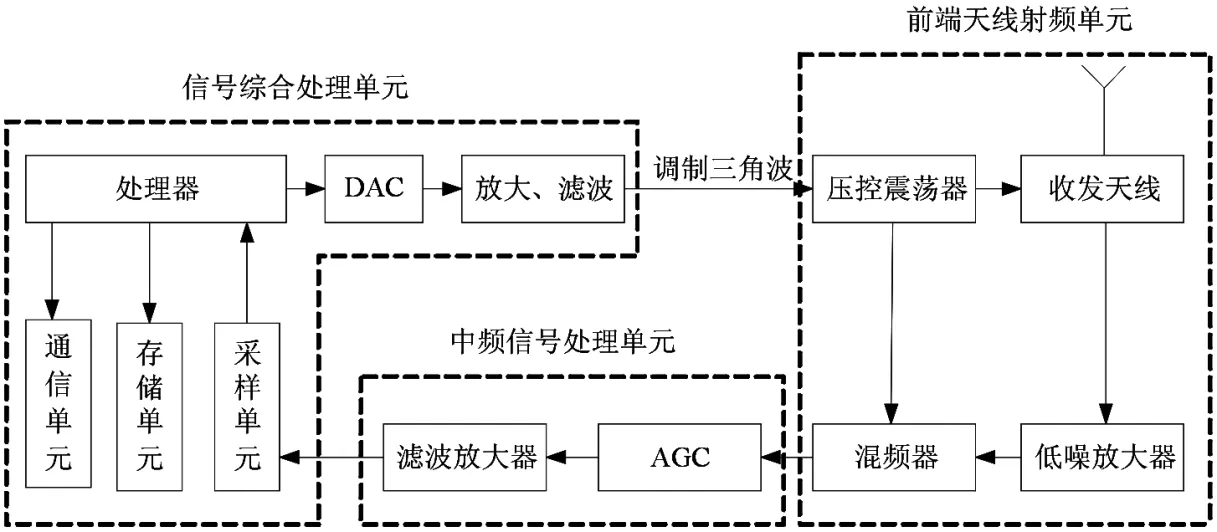
图1 系统结构框图
其中收发天线部分采用环行器使发射、接收隔离,使用标准的零拍型FMCW接收/发射机平台.由于本系统的雷达作用距离在60 m左右,使中频信号动态范围达70 dB,对于这样宽的中频动态范围,中频信号处理中采用AGC(自动增益控制)放大器,以保证模拟信号能够在信号处理机内经A/D变换成数字信号后处理.中频处理单元主要负责对射频前端混频器输出的代表路面信息的信号进行放大、滤波等,中频信号处理单元主要由低噪声放大器和匹配滤波器组成.由于回波信号很小,经混频后的中频信号需要经过低噪声放大后才能作进一步处理.由于有用信号频率处于一定带宽内,并且存在幅度较大的三角波泄露信号,因此需要对信号进行AGC(自动增益控制)处理,最终输出-1 V~+1 V之间的模拟信号给综合信号处理单元.综合信号处理单元以TI公司的TMS320系列DSP为核心处理器,通过信号调理,A/D,FFT变换等处理计算和判别出目标距离,并根据汽车行驶过雷达照射区域的时间和波形的变化以及信号处理单元内部定时器记录的数值计算出车流量、车速、车道占有率、车型等.同时DSP还产生用于收发前端信号调制的三角波经由D/A芯片转换后馈入前端[2].
2 系统软件程序设计
2.1 程序总体框架
总体上,系统是利用高速DSP芯片的定时器产生一定时间间隔的中断,同时DSP芯片对由ADC采样的信号进行频谱分析,由于雷达检测器安装在固定的位置,其覆盖区域的背景比较固定,因此可以在频域上完成杂波的消除算法,将有车辆通过时的频谱与无车辆通过的频谱进行频域消干,再根据频谱的幅度位置判定车辆所属车道,分别记录车辆通过的次数,然后除以定时器的中断周期,就可得到车流量的统计信息[3].
系统开机时首先对DSP芯片的各内部寄存器进行初始化,然后对系统中用到的定时器0和定时器1以及计数器等常数赋初始值,接下来在软件中将定时器0, 1开启,两个定时器分别用来控制微波波束每次检测车辆的周期和统计车流量的周期.DSP的工作流程主要是一个主循环,在每次主循环中,首先检测串口通讯标志变量comflag是否为0,若为0,表示目前没有与计算机界面进行串口通信,比如雷达刚上电,界面还没有发出连接雷达命令时,这时依次进行信号采集,频谱分析,判断各车道有无车存在(用函数Vexist实现),车流量统计(用函数flowcount实现),发送车道信息,这些工作在36 ms内完成,由定时器0来控制;然后查询串口接收缓冲区有无界面发过来的命令帧,若没有则继续执行主循环,若有则先将串口通讯标志变量comflag置1,再从串口接收缓冲区中读取命令并执行,比如连接雷达,然后继续主循环.如果主循环在开始检测到串口通讯标志变量comflag为1,说明还在串口通信当中,跳过车流量统计继续和界面通信,执行界面的命令比如用户参数设置等,直到界面最后发出接受车道信息命令时,DSP执行的操作就是将comflag变为0,表示不再和界面进行串口通信,下一次主循环在开始检测到comflag为0,于是又进行车流量统计,并发送车道信息.程序的统计时间设定为30 s,由定时器1控制.
若达到了统计时间则计算每分钟的车流量,进行平均车速、车道占有率和长车流量的计算并与计算机串口进行通信,将车流量信息传至交通管理系统进行交通的管理调度,然后进入新一轮大循环并进行新一轮车流量监测;若未到达30 s则程序转入小循环,累计当前车数.整个程序每30 s重新显示一次当前的车流量信息,周而复始实时检测.程序流程图如图2所示[4,5].
2.2 车流量统计
void Vexist (int a [8]),此函数根据FFT的结果判断本次检测周期内(36 ms)各车道有无车存在,入口参数和出口参数都是a [8],a数组中某一个元素为0表示本次检测周期该元素对应的车道没有车,反之,为1表示有车存在.它的流程图如图3所示.
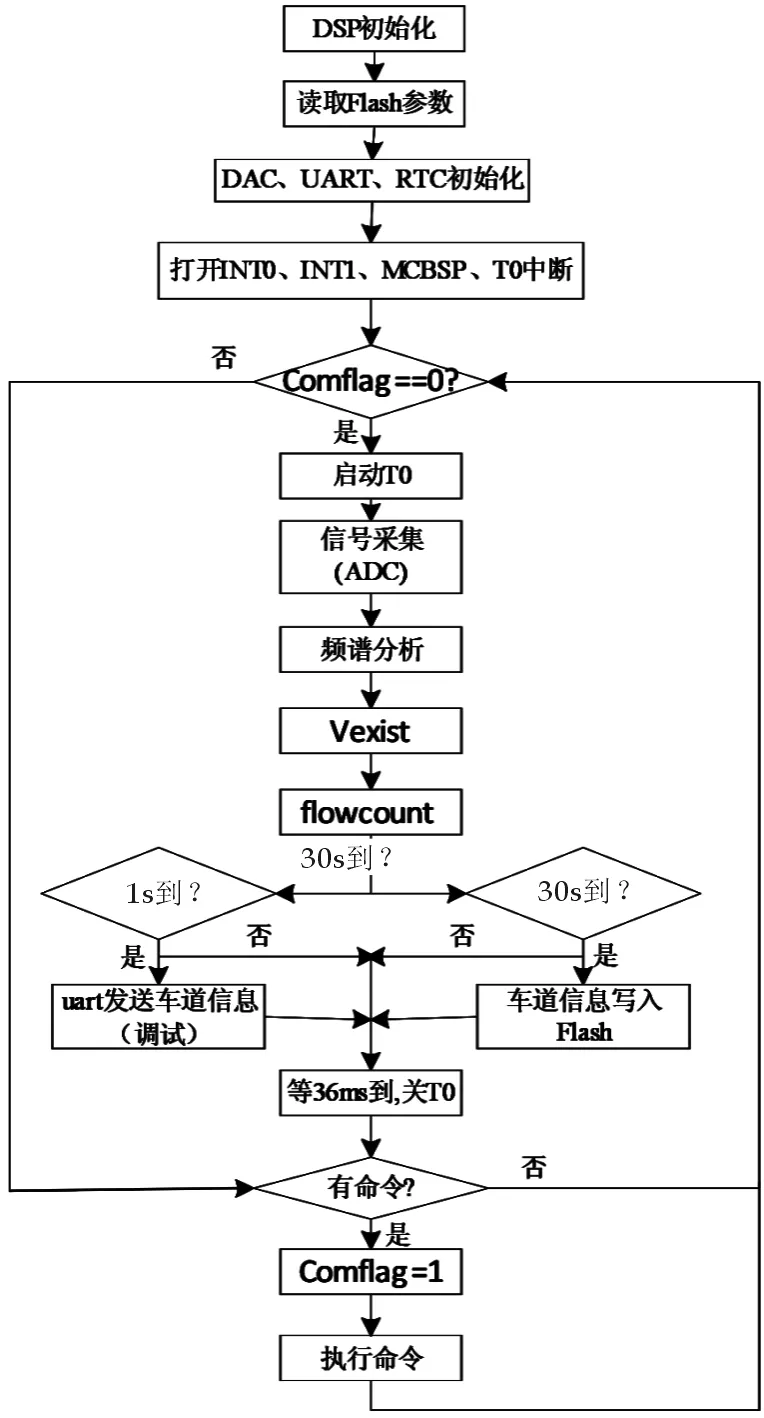
图2 主程序流程图

图3 检测周期内车道有无车辆判断流程图
其中,lane_ index是车道指针, nLane是车道数,f_index是频率指针,freq[16]是车道频率点,fft_squ[]是幅度谱的平方数组,level [8]提车道门限.此子程序就是对于每个车道,都判断该车道对应的几根谱线中有没有值超过门限的,若有则认为本次检测周期内该车道有车存在,否则认为无车.
void flowcount(int a [8]),此函数对总车流量等车道信息进行统计.每次车流量统计主循环都会得出本次检测周期车道有无车存在的结论,仅以第一车道为例,用一个变量REGIST1来表示:为0表示无车,为1表示有车,而车道状态用REGIST11表示:为0表示无车状态,为1表示有车状态.容易想到车流量计数的一般方法是:每次主循环都将得出的REGIST1值赋给REGIST11,即车道状态随本次检测周期的结果而改变:本次检测时间里判断有车存在,车道状态变成有车状态,本次检测时间里判断没有车存在,车道状态变成无车状态.当车道状态从无车变到有车时,即有车进入雷达检测区域时,车流量才加一[6,7].
3 结束语
本文针对FMCW体制雷达,采用中频处理单元和DSP处理器,设计了微波雷达车流量检测系统,应用相关算法对中频信号进行频谱分析,获得车道信息并进行车流量统计,并设计实现了系统信号处理、车流量统计及串口通信的软件系统.
参考文献
[1] H Xu. Real-time adaptive on-line traffic incident detection[J]. Proc. of the IEEE International Symp. On Intelligent Control,1996,l,200-205.
[2] Natvig,M.K., Westerheim, H.. National multimodal travel information-a strategy based on stakeholder involvement and intelligent transportation system architeeture[J].Intelligent Transport Systems, IET.2007,1(2):102-109.
[3] 张 建,王传琦,李瑞强,等.基于微处理器的车流量数据的检测与分析[J].微计算机信息,2007,(12):25-26.
[4]蒋铁珍,余 稳,孙晓玮.RAF-T1微波交通检测器在智能交通系统中的应用,第一届智能交通年会集[C].2005,249-255.
[5] 盛怀茂,李玉芳,夏冠群,等.FMCW毫米波雷达中频滤波器的研究明[J].红外与毫米波学报,2001,(6):472-476.
[6] 周 晔.数字信号处理系统在车流量检测系统中的应用与研究[D].华东师范大学硕士学位论文,2007,4.
[7] 陈良章,郑 纯,薛 伟,等.基于DSP的微波车流量检测系统设计与实现[J].交通与计算机,2008,(l):50-53.
