基于机载INSAR技术生产DLG产品的工艺和方法
2011-02-20苗小利
苗小利
(西安煤航技术开发应用分公司, 陕西 西安 710054)
0 前 言
由于雷达干涉测量(INSAR)具有全天时全天候工作的优点,可以直接获取地形的高程信息,因此其应用领域得到了不断推广.许多欧美国家已将实用化的机载高分辨率INSAR 技术作为一种新的、先进的技术手段逐渐应用于地形测绘方面.近几年,我国也开展了基于INSAR技术地形测绘的研究与试验,初步形成了基于单片正射INSAR影像、数字高程模型生产DLG数据的工艺流程和作业方法,推动了机载INSAR技术在地形测绘方面的应用.
1 机载INSAR技术生产DLG产品的工艺流程
雷达干涉测量(INSAR)是基于时间测距的成像机理,利用雷达回波信号所携带的相位信息获取地表的高程信息,其原理是通过两副天线同时观测,获得同一区域的重复观测数据(复数影像对),提取同一目标对应的两个回波信号之间的相位差,结合观测平台的轨道参数等提取高程信息[1],生成DEM数据.INSAR影像则是由SLC数据的实部和虚部计算出振幅值,然后进行灰度化变换,生成原始影像,再经过变换以及去噪声、地理编码后生成DOM数据,而DLG数据的高程、平面坐标则分别源于机载INSAR技术生成DEM、DOM数据,因此基于INSAR技术生产DLG产品的工艺流程有别于其他技术手段,具体如图1所示.

图1 机载InSAR系统生产DLG流程
2 机载INSAR技术生产DLG的作业方法
2.1 平面定位方法
由于单片INSAR影像特殊的侧视成像机理,对于高出地表的垂直地物,则产生顶底位移现象[3],即雷达波束到顶部A的时间比到底部B的时间短,顶部影像a先被记录,底部影像b后被记录,如图2所示,因此顶部影像a和底部影像b的位置在单片INSAR影像中不是处于同一位置(正射投影A、B两点应为同一点),在影像中产生了Δr(其中Δr=Δh/tanη,ΔR=Δh/cosη)的定位误差.
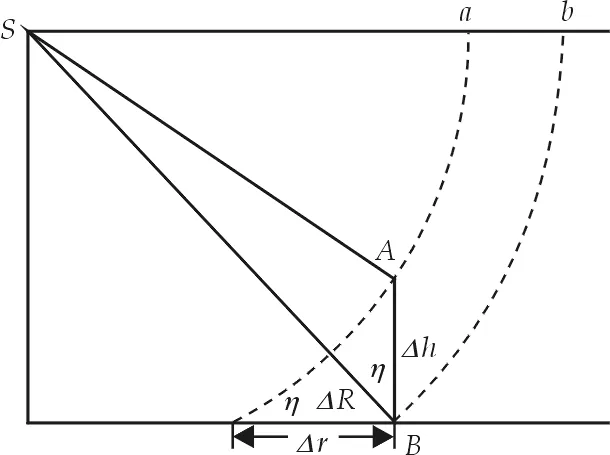
图2 地物高度引起的投影差
其次在单片INSAR影像中,垂直地物的顶部的影像往往没有遮挡,多呈现为突出的高亮点,而底部的影像或因遮挡或为阴影而不易定位,因此基于单片INSAR影像垂直地物的定位,如果在地物影像的顶部位置,须经过误差改正,才能达到底部定位的目的.
所以,虽然INSAR是以影像形式显示地物目标特征,但是它不同于光学传感器的成像方式和成像机理[1],因此基于机载INSAR影像平面定位时应特别关注其误差的分布规律,才能达到准确定位.
2.2 地貌数据采集方法
DLG数据包括地貌数据的采集、自然地物和人工地物的采集.利用机载INSAR技术可以直接获取地表的DEM数据,从DEM数据我们可以生成等高线和高程注记点数据,从而形成了地貌数据.具体方法如下:首先是利用自主开发的程序DEM数据处理软件,将原始的DEM RAW格式数据转换成ASC码格式或矢量图形数据,然后采用成熟的商业软件(如ARCGIS)生成等高线,利用自主开发的软件通过内插从DEM数据中读取高程注记点,如图3所示.概括起来可以形成如图4所示的作业流程.

图3 DEM数据生成的等高线和内插的高程点及其注记 图4 等高线和高程注记提取流程图
2.3 地物要素的判采方法
地物版数据采集,包括两方面的内容,一是INSAR影像的地物目标的识别(定性),二是INSAR影像的地物目标的定位.对于地物目标的定位应从SAR的成像原理入手分析,由于SAR影像为侧视投影,因此它不同于光学影像的中心投影,更不同于地形图的正射投影,即是将INSAR斜距影像校正成地距的正射影像,但因地物、地形高度引起的顶底倒置、阴影、叠掩等无法消除,这是影响INSAR影像定位精度的主要原因,因此在DLG数据采集过程中点线面三类要素的定位精度就成为关注的重点.
对于地物目标的识别与判读, INSAR图像与光学图像类似,可以将地物目标分为点状地物、线状地物和面状地物,这些不同类型的地物目标在图像上具有不同的表征形式,判读方法也有所不同.
2.3.1 点状地物目标
INSAR图像上的点状地物目标是指以亮点形式呈现在图像上的目标.通常这些目标的几何尺寸小于一个分辨单元的地面尺寸,但它的回波信号相当强,在整个地块的回波中占据了主导地位,这时像素的信号几乎就只反映它的存在[2].如地面控制点(角反射器)、高压输电线塔、油井、油罐、液体、气体贮存设备、卫星地面接收站、信号灯等,都呈现为点状地物目标.
点状地物目标都处在一定背景中,能否从背景中识别判读出点目标,不仅与点状地物目标的性质有关,也与背景的特性和图像噪声有关.在点状地物目标识别中,背景的干扰主要表现为相干斑噪声,因此点状地物判采时应注意区别相干斑噪声.
2.3.2 线状地物目标
线状地物目标通常有表示两种情况,一是表示不同类地物要素的界线,如水陆界线,二是当地面地物要素的横向尺寸小于分辨单元尺寸时,表示为线状要素.采集线状要素应注意,人工线状地物要素通常都比较直,很少弯曲,即使有转弯的地方也总是钝角,如铁路、公路、桥梁、机场跑道、梯田坎等;而自然线状地物要素情况比较复杂,如自然河流的弯曲方向变化较多,而地质断裂造成的线性体则多为直线或有一定弧度.在采集中应充分利用这些成像的特征.
2.3.3 面状地物目标
面状地物目标通常是由许多同一类型的散射点组成,其位置是随机的,所接收到的电磁波相位不同,其振幅也是随机的,但没有任何一个散射点的回波散射可以在总回波功率占主导地位[2].表现在图像上,这类地物最强和最弱信号的周期变化,形成一系列亮点和暗点相间的图斑,且色调一致.在地形图中面状地物主要有街区式居民地、露天体育场、双线河流、湖泊、池塘、水库、双线水渠、土质植被等.两种相邻的地物目标后向散射系数之差便可形成边界线.相邻地物目标反差越大,边界线越清楚,判采这类地物时可以利用地物的几何特征、纹理信息等进行.
3 精度检测
基于以上的作业方法,经过了两个试验区的实施,并进行了成果的平面精度检测和高程精度的检测,统计结果如表1~表3所示,从表中数据不难看出其平面精度能够达到1∶10 000、1∶50 000成图精度的要求,而高程精度能够达到1∶50 000的成图要求、1∶10 000丘陵地区的成图精度要求.

表1 平面精度统计表

表2 高程精度统计表

表3 规范限差要求
4 结束语
综上所述,将机载INSAR技术用于生产DLG产品,通过两个试验区的试验和生产,采用上述工艺和作业方法可以满足1∶5万的精度要求,同时也能达到1∶1万丘陵地区的高程、平面精度的要求.如果要达到1∶1万平地的高程精度,还需要提高机载INSAR技术获取DEM数据的精度,或采取野外实测的方法进行.
参考文献
[1] 廖明生, 林 珲.雷达干涉测量——原理与信号处理基础[M].北京:测绘出版社,2003:36-41.
[2] 宋建社, 郑永安, 袁礼海.合成孔径雷达图像理解与应用[M].北京:科学出社,2008:57-59.
[3] John C.Curiander, Robert N.McDonough.Synthetic Aperture Radar:Systems and Signal Processing[M]. Beijing:Publishing House of Electronics Industry, 2006:259-265.
[4] Chris Oliver.Shaun Quegan.Undersstanding Synthetic Aperture Radar Images[M].Beijing:Publishing House of Electronics Industry, 2006:49-54.
[5] 舒 宁. 雷达遥感原理[M]. 北京:测绘出版社,1997.
[6] 张继贤,杨明辉,黄国满.机载合成孔径雷达技术在地形测绘中的应用及其进展[J].测绘科学, 2004,(6):45-49.
[7〗 刘国林,郝晓光,薛怀平. InSAR技术的理论与应用研究现状及其展望[J] .山东科技大学学报(自然科学版) , 2004,(9):62-66 .
[8] 刘国祥, 丁晓利, 李志林, 等. 使用InSAR 建立DEM的试验研究[J] . 测绘学报, 2001,(3):37-40.
[9] 顾天襄.合成孔径侧视雷达影象平面加密精度[J]. 武汉测绘学院学报, 1983,(2):28-31.