车辆半主动悬架控制器的设计与研究
2011-02-09么鸣涛
么鸣涛,顾 亮,蒙 洋
(1. 北京理工大学 机械与车辆学院,北京 100081;2. 北京航空航天大学 软件学院,北京 100083)
0 引言
半主动悬架工作时几乎不消耗发动机的功率,不需向悬架系统施加外部能源,只需适时地改变悬架的阻尼元件或弹性元件的参数即可,结构简单,造价低,而减振效果接近于主动悬架,因此半主动悬架的性能价格比高,具有更为现实的应用价值,受到国际上各大汽车公司和研究人员的广泛重视[1,2],并且根据路面来适时的调节悬架的软硬程度,将有着重要的意义[3]。
1 半主动悬架控制要求及其控制策略
本系统主要考虑振动加速度、悬架动行程、以及减振器的发热功率这些悬架性能的主要评价指标[4]。基于上述几个性能指标,控制系统根据所采集的数据,包括车身振动加速度,油气悬架气体压力,减振器的温度,来实时地改变悬架阻尼系数。为了实现实时的控制,系统只设软、中、硬三个档位。执行机构采用电液比例阀,即通过控制通过电磁阀的电流来控制节流孔开度,以实现对阻尼力的调节。

图1 半主动悬架控制器
2 半主动悬架控制器的硬件研发
半主动悬架控制器系统如图1所示,主要包括电源驱动板、主控板和温度变送板。
由于车辆电源为24伏,必须通过电源驱动板中的电压变换模块将24V变换成所需要的电压。电压变换模块采用三块电源模块,其中两块SF24S5-5W,实现24V转换成5V,但两块电源模块相互不共地。一个采用数字地,给主控板供电,一个采用模拟地,给输出模块供电。另一块电源模块为SF24S15-10W,实现24V转换为正负15V,给电源互感器供电。电源驱动板包括电源变换模块、PID恒流闭环调节模块、驱动模块等。
主控板包括如下功能模块:微处理器(单片机)、数据采集系统(采集加速度、油气悬架气体压力、各减振器的温度)、试验数据存储模块、看门狗抗干扰模块,时钟模块、上位机监控模块,ISP系统、MIC总线通讯模块,系统机构如图2所示。
微处理器采用PHILIPS公司的51单片机系列P89V51RD2,该单片机采用8位处理器,包含64kFLASH和1024字节的RAM。FLASH程序存储器支持并行和串行在系统编程系统,内设三个计数/定时器和一个看门狗定时器,具有PWM输出功能[5]。
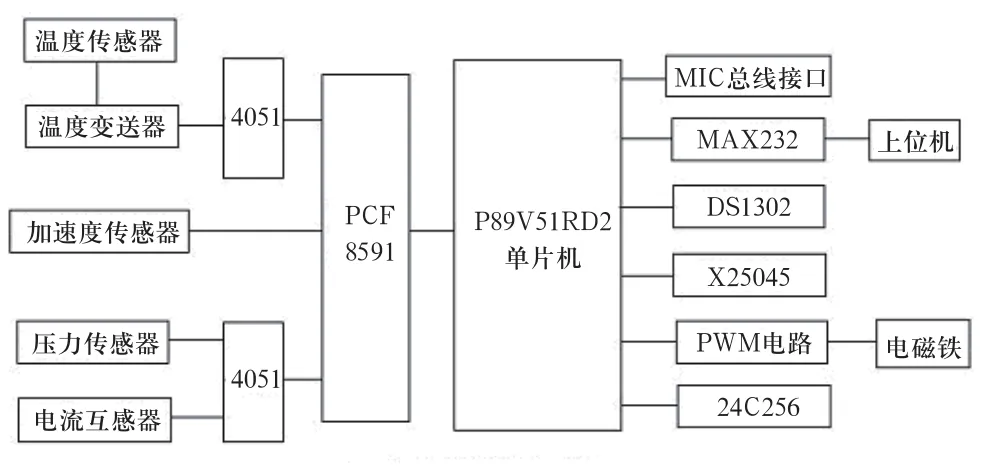
图2 半主动悬架控制器系统框图
数据采集系统采集振动加速度、悬架气缸压力、以及悬架温度三个信号。模拟量采集进来经A/D转换送入单片机,A/D转换采用PHILIPS公司的A/D芯片PCF8591,该芯片采用I2C数据总线协议。由于有多路压力和温度信号,因此用两片4051实现压力和温度信号的选线。
试验数据存储采用芯片24c256,该芯片采用I2C数据总线协议。存储空间大小为32K,控制器每隔1分钟对当前的状态信息进行存储。按每天跑车八小时计算,可以存储三天的实验数据。该存储模块的使用极大的方便了实验数据的采集和记录。
时钟模块纪录试验的时间,采用芯片DS1302。该芯片采用涓流充放电技术,节省芯片的耗电量,即使在系统断电的情况下,也能正常的工作。实验证明该芯片准确度相当高。
看门狗芯片采用X25045,以防止程序“跑飞”。看门狗需要主程序对其定期的“喂狗”,否则将产生复位信号是主程序复位。当程序受外界的干扰或进入非正常的死循环时,主程序不对看门狗进行“喂狗”操作,这是看门狗复位主程序,使其正常的运行。
ISP在系统编程系统以及上位机监控系统都是通过串口通讯实现。用MAXIN232芯片来实现电平的转换,完成于上位机的接口。ISP系统为烧写程序提供了很大的方便,不需要把芯片拔出来插在仿真器上烧写,直接可以进行在线的修改。上位机监控系统可以实现对试验数据在线和离线的读取,极大的方便了试验数据的纪录,以及故障现象的分析。
通过MIC总线可以将悬架当前的运行状况上传到上一级控制器,并从总线上获得车速等信号,实现了与车辆其他分系统信息的共享。
温度变送板中的温度传感器采用铂电阻温度传感器pt100。此传感器电阻阻值随着外界温度的升高而增大,具有灵敏度高,工作可靠的特点。但其线性度不好,需要变送电路来改善其线性度。电路图3所示。该电路采用正反馈进行线性补偿。PT端接温度传感器pt100。通过电桥,把电阻变化转化成电压的变化,并经过运放LM224进行放大处理。VT为输出,并把一定的正反馈量引入到电源输入端,经过加法器和电压跟随器,给电桥供电。经过实际的检验,此温度变送器具有较高的线性度。

图3 温度变送器电路图

图4 PWM模块原理图
本控制系统通过PWM输出来控制通过电磁阀的电流。但是当长时间使用时,电磁阀过热,其电阻增加,从而导致通过电流阀的电流减小,偏离控制目标,势必影响悬架的控制性能。通过电流互感器可以测得通过电磁阀的电流,并把测得的数据送入单片机,通过PID控制算法调整PWM的参数设定,以实现电磁阀恒流输出,电路图如图4所示。LH1为霍尔传感器,f1端接负载。当pt1端注入PWM脉冲时,负载电路就能够适时的接通和断开。霍尔传感器可以感应负载电路的电流,通过电位器将其转化成电压信号i/v1,经A/D转化后送入单片机。此模块还有故障诊断的功能,电路中接入了熔断电阻,当电磁阀短路时,输出电流过大,导致熔断断开,时输出电流为零,流互感器能及时检测到此信息并送给单片机。
3 半主动悬架控制器的软件设计
半主动控制的软件设计分为如下几个模块构成:MIC总线通讯模块实现MIC的读写操作,I2C总线通讯模块,实现对数据存储器24C256的读写以及A/D转换器PCF8591的读写;PWM输出模块,通过设置寄存器的参数,来适时的改变PWM输出;时钟模块,完成对时钟芯片的读写操作;串口通讯模块,主要实现ISP功能以及上位机监控功能;PID控制模块,实现数字PID算法,以适时的调节PWM参数,以控制通过电磁阀的电流;主程序模块,将各模块通过接口连接起来,实现整个控制功能。
4 结论
所有的软件均经过调试运行,从台架试验和实际的跑车试验的结果来看,控制器实现了对减振器阻尼的预期控制目标,并实现了控制系统与PC机的数据通信。在系统编程功能和对试验数据的在线和离线采集功能,极大的方便了程序的修改和实验数据的读取。 实验结果表明:控制器的软、硬件设计完全符合军标要求。
[1] T.Yoshimura,K.Nakaminami,M.Kurimoto,J.Hino.Active suspension of passenger cars using linear and fuzzy-logic controls[J].Control Engineering Practice,1999,7:41–47.
[2] TOSHIO YOSHIMURA. Active suspension of vehicle systems using fuzzy logic[J].International Journal of Systems Science,1996,27:215-219.
[3] 丁法乾.履带式装甲车辆悬挂系统动力学[M].北京:国防工业出版社,2002 .
[4] 俞德孚.车辆悬架减振器的理论和实践[M].北京:兵器工业出版社,2003.
[5] 何立民.单片机高级教程[M].北京:北京航空航天大学出版社,1999.
