基于机器视觉的手机镜头机器人装配应用研究*
2011-02-05张建中何永义
张建中,何永义,李 军
(1.上海大学机电工程与自动化学院,上海机器人技术与机械自动化重点实验室,上海 200072;2.合肥学院机械工程系,合肥 230022)
基于机器视觉的手机镜头机器人装配应用研究*
张建中1,2,何永义1,李 军1
(1.上海大学机电工程与自动化学院,上海机器人技术与机械自动化重点实验室,上海 200072;2.合肥学院机械工程系,合肥 230022)
介绍了机器视觉在导引手机镜头(由LENS、BARREL部件构成)机器人装配中的应用,采用直角坐标型机器人设计成手机镜头机器人装配设备,进行手机镜头同一对位置下的镜头装配实验,获取手机镜头LENS、BARREL部件在各个位置下的图像,通过模板匹配的方法确定部件的坐标值,导引手机镜头机器人装配。实验表明:机器视觉方法具有实时、在线、非接触、重复误差小、精度高、自动化等特有的优点,在机器人装配中具有较好的应用前景;设计出手机镜头机器人装配设备已经成功运用于某公司,各项性能、效果良好,均满足客户要求。
机器人;机器视觉;手机镜头;装配;图像处理
0 引言
工业机器人在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业已经得到很好的应用,也是设计制造加工等过程的自动化的重要手段。
近年来,机器视觉技术不断促进机器人在各行各业更好的应用。机器视觉是使用计算机实现对视觉信息的处理,在实现实时、在线、非接触高精度测量、提高生产效率、生产过程的柔性和自动化程度方面具有独有的优势。本文使用机器视觉技术为机器人提供装配物与被装配物的位置信息,使机器人实现更快、更便捷、更稳定的装配工作。
1 手机镜头机器人装配系统
随着电子技术的进步,手机是现代生活中不可缺少的通信工具,具有数量多、更新换代快的特点。手机在生产过程中大多数部件的装配都是手工来实现,效率低,劳动强度大,而且装配质量难以保证,随着机器人技术的深入发展,这种现状将不断发生改变,未来的手机制成设备应该具备自动化程度高、制造品质好、生产效率高的特点,本处使用机器视觉技术进行镜头零件(由LENS和BARREL构成)的定位,通过分析图像获得所需信息来控制直角坐标式三轴机械手进行手机镜头部件的移位、装配。
1.1 直角坐标型ROBOT
直角坐标型机器人是机器人的一类,由控制系统、驱动系统、机械系统、操作工具等组成,特点有:(1)便于增加视觉、测距传感器等;(2)高速度、高精度、高可靠性;
(3)每个运动自由度之间的空间夹角为直角;
(4)灵活,多功能,因操作工具的不同功能也不同;
(5)便于操作维修。
直角坐标型机器人常用于装配、焊接、搬运、包装、上下料、码垛、拆垛、检测、探伤、分类、贴标、喷码、打码、喷涂等工作,特别适用于多品种、多批量的自动化作业,直角坐标型机器人对于稳定提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
1.2 实验装置
图1是手机镜头机器人装配实验设备,由ROBOT、步进电机、视觉光源、镜头、工业相机、图像信号采集单元、监视器、通讯单元等部分构成。

图1 手机镜头机器人组装设备
工作原理:采用工业相机将镜头的LENS部件、BARREL部件转换成图像信号,根据像素分布和亮度、颜色等信息,转变成数字化信号,传送给计算机或控制器;利用软件进行图像去噪、图像增强、目标匹配及寻找目标,拟合计算目标物体位置坐标,PC机向ROBOT发位移命令,实现X-Y-Z-R运动,进行运动-位置控制。
1.3 软件算法
图2是机器人组装处理过程流程。机器视觉是通过相机获取工件的二维图像,并通过软件进行分析和解释,进而转换为命令,让机器人能够辨识物体,并确定其位置。
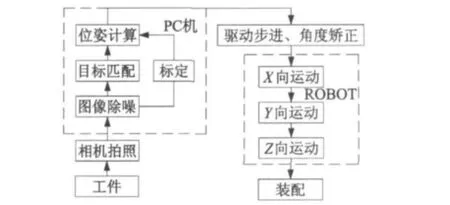
图2 机器人镜头组装处理过程流程
图像模板匹配目标分割算法公式[10]:

式中:ts、j—— 灰度阈值、实例数;
t(ui,vi)—— 模板各点的灰度值;
f(r+ui,c+vi)—— 图像各点的灰度值;
sad(r,c)——灰度差值绝对值的相似度度量。
手机镜头机器人装配软件包括图像采集、图像处理、运动控制、I/O控制、角度校正、标定、位移调整、串口通信等。
2 实验
为验证机器视觉在手机镜头机器人装配中的精度和可靠性,现采用50次同一对LENS、BARREL到位情况做实验,实验情景见图3,实测目标物体在图像中位置坐标数据如下表1、表2。
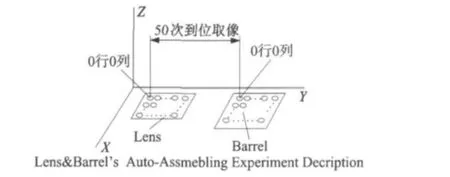
图3 手机镜头机器人组装实验描述

表1 LENS坐标值实测数据( 单位:pixel,1pixel=0.0085mm)

(续表)

表2 BARREL坐标值实测数据( 单位:pixel,1pixel=0.0085mm)


表3 LENS和BARREL坐标值均值
单次测量值的标准偏差计算:


表4 LENS和BARREL坐标值标准偏差
机器人镜头组装实验坐标数据分布曲线见图4。

图4 LENS和BARREL点位置分布曲线
机器人镜头组装实验偏差曲线见图5。

图5 LENS和BARREL点位置偏差曲线
图4a中,测量精度可以达到0.002mm;在图4b中,图像成像质量一般时,测量数据精度下降,精度仍可以达到0.004mm。图5a中,图像成像质量好,测量图像的相似程度高,测量数据精度高;在图5b中,图像成像质量一般时,测量数据精度下降。比较图5中a与b,实验中手机镜头的BARREL图像特征不够明显,使得实验中的SCORE值不高,进而导致数据精度稍差,并且数据有分散的倾向。
3 结束语
通过手机镜头机器人装配实验可以得出以下结论:
(1)系统运动精度高,图像测量数据精度高,重复性好,可靠性高,几乎没有粗大误差;
(2)工件图像成像质量直接影响数据的准确性;
(3)SCORE值的高低直接影响数据的分散程度。
存在的不足与改进措施:
(1)图像处理算法的占用时间,由于是120万像素的图片,系统的计算量大,处理时间较长,给系统运动带来明显的时滞现象。改进措施是采用高速相机、设计高速目标识别算法;
(2)精度仍有提升的空间。改进措施是分析各个装配误差源,尽量减少各个环节的误差;尤其是改进成像系统,如调焦、光源选择等;
(3)SCORE值较低,主要原因是环境光改变了这些光源照射到物体上的总光能,这种干扰使输出的图像数据存在噪声。改进措施是采用加防护屏的方法,减少环境光的影响。
总之,机器视觉在手机镜头机器人装配中的应用特点:实时、在线、非接触、精度高,可靠性好,具有较好的应用前景。作者设计出的手机镜头机器人装配设备已经成功运用于某公司,各项性能、效果良好,均满足客户要求。
[1]彭庆红.自动化二极管端子装配线的研制[J].组合机床与自动化加工技术,2011,(2):103-107.
[2]冯肖维,方明伦,何永义,等.移动机器人自然路标特征提取方法[J].机器人,2010,32(4):540-546.
[3]付京逊,冈萨雷斯R C,LRR C SG.机器人学[M].北京:中国电子科学技术出版社,1989.
[4]杨延西,刘丁,闰振杰.图像反馈机器人视觉伺服系统仿真[J].系统仿真学报,2003,15(12):1737-1744.
[5]许雷,等.一种基于小波相位滤波及视觉非线性的医学图像自适应增强新方法[J].电子学报,1999,27(9):121-123.
[6]Laine A F,Schuler S,etal.Mammographic feature enhancement bymultiscale analysis[J].IEEE Trans Medical Imaging,1994,13(4):725 -740.
[7]张建中.基于单片机的WQ-5型弯曲梁应变测量系统设计[J].自动化仪表,2007,28(5):59-61.
[8] Zitova B,Flusser J.Image registration methods:Asurvey[J].Image and Vision Computing,2003,21(11):977 -1000.
[9]张广军.机器视觉[M].北京:科学出版社,2005.
[10]斯蒂格,尤里奇,威德曼,等.机器视觉算法与应用(双语版)[M].北京:清华大学出版社,20081.
[11]Kim S,Oh S Y.Hybrid position and image based visual servoing for mobile robots[J].Journal of Intelligent and Fuzzy Systems,2007,18(1):73 -82.
[12]Craig J J.Introduction to robotics:Mechanics and control[M].Beijing:China Machine Press,2005.
[13]M.A Younis.On line surface roughnessmeasurements using image processing towards an adapptive control,Computers and Industrial Engineering,1998,35(1 -2):49 -52.
[14]吴振彪,王正家.工业机器人[M].武汉:华中科技大学出版社,2006.
(编辑 赵蓉)
App lication Research on Machine Vision in Mobile-Phone Robotic Assembly Equipment
ZHANG Jian-zhong1,2,HE Yong-yi1,LIJun1
(1.School of Mechatronics Engineering and Automation,Shanghai University,Shanghai Key Laboratory of Mechanical Automation and Robotics,Shanghai 200072,China;2.Department of Mechanical Engineering,Hefei University,Hefei230022,China)
The paper introduced an important app lication research on machine vision in guiding mobilephone lens(include LENSand BARREL)robotic assembling process.A mobile-phone lens cartesian coordinate robotic assembly equipment was designed and experiments were conductedLet the assembling equipment work at the same coupleworkpiece’s positions for fifty times,acquire the image at every position,and calculate theworkpiece’s center coordinates w ith templatematching,so as to drive the robot to move to the right positions.Comparing w ith other typicalmethods,results show that the special advantage of the technology ofmachine vision is both characterized by automation,non-contact,high accuracy,low errors of replication on functions,It’s no doubt thatmachine vision is a good technology which w ill lead to good application future in guiding robotic assembling equipment.Themobile-phone lens robotic assembly equipment has been developed successfully for a corporation,and its good performancemeets all the demands of industry production.
robot;machine vision;mobile-phone lens;assembling;image processing
TP391
A
1001-2265(2011)06-0029-04
2010-03-17;
2011-04-11
安徽省高校省级自然科学研究项目(KJ2010B180)
张建中(1970—),男,安徽巢湖人,合肥学院机械工程系讲师,在读博士,研究领域为机床加工、机电控制、图像处理与检测,(E-mail)zjzfirst@yahoo.com.cn;何永义(1965—),男,浙江兰溪人,上海大学机电工程与自动化学院教授,博士,博士生导师,研究领域为智能控制,机器人,机电一体化,(E -mail)heyongyi@mail.shu.edu.cn。
