基于总变分的多特征阴影检测方法研究
2011-01-26张力耘贾晓敏陈苏娟
张力耘,贾晓敏,陈苏娟
(1. 山西省电力勘测设计院, 山西 太原 030001;2. 北京清华山维新技术有限公司,北京 100085)
基于总变分的多特征阴影检测方法研究
张力耘1,贾晓敏1,陈苏娟2
(1. 山西省电力勘测设计院, 山西 太原 030001;2. 北京清华山维新技术有限公司,北京 100085)
针对实际生产过程中,影像上的阴影导致影像信息量缺损,影响影像匹配和拼接这一问题,提出基于总变分的多特征阴影检测方法,并通过实验验证了该方法的有效性。
阴影检测;多特征。
1 概述
在航空影像的应用处理中,为了目标识别,需要提取有关分割后物体的形状、颜色等信息。但这些信息被一些噪声干扰,一部分来源于图像获取过程,一部分来源于自然 原因,比如阴影。对于阴影而言,它具有双重性质:一方面,它是空间目标之间时空关系的一种反映,可用来辅助地面上人工目标的提取、地形分类和地质制图、确定目标的高度、形状、表面特性以及相互运动关系等;另一方面,它的存在将直接影响到影像上目标地物的边缘提取、目标识别、地物分类、影像匹配和影像目视解译等。因此,有效的检测或者消除阴影,具有十分重要的意义。
2 多特征方法的提出
现有的检测阴影算法大多是根据影像阴影区域的某种同一性,即通过分析阴影在亮度、几何结构和色彩等方面的性质来识别阴影。高空间分辨率遥感影像的场景复杂、投影目标众多、包含的阴影区域也比较复杂,如投影表面不平坦、目标与其投射的阴影区域间有遮挡等。另外,影像中还存在与阴影光谱特征相似的其他地物,如水体等,这些都影响到影像中阴影区域的检测。如果只利用阴影区域的某一种特性,则由于存在异物同谱和同物异谱的现象,不能充分区分目标,对于包含水体的影像出现阴影错检和漏检的情况,不能达到理想的检测效果。
图像分析过程中无论是目标表达还是参数测量,都是围绕着“特征”来展开的。因而,“特征”在遥感影像分析中具有重要的意义。特定的目标总是和相应的特征或特征组合(多特征)相联系的,掌握了目标特征之后,只要选择合适的特征或特征组合,就能把某一目标与其它目标区别开来。基于此,一些学者通过分析高空间分辨率遥感影像中水体与阴影区域的光谱特征,提出了基于彩色空间多特征的阴影检测方法。
在影像的生成过程中,由于直射光线被遮挡,阴影区域的亮度特征被作为阴影检测的重要手段。本文运用总变分方法进行阴影区域的检测即利用这一特征,当有其它较暗、亮度较小的地物时,运用总变分方法不能准确区分阴影区域与此类地物,进而不能达到较好的检测结果。影像中的水体一般呈现暗色,其亮度值与阴影区域的亮度值很接近。如果只利用亮度值特性进行检测,则会出现将水体错检为阴影的现象。因此,本文运用多特征的方法进行水体与阴影的区分。即首先运用总变分方法对影像的阴影进行检测,针对存在水体与阴影混淆的情况,分析水体与阴影在R、G、B三个通道的亮度特征,利用它们的特征差异提取出水体,从而达到检测阴影的目的。
3 基于总变分的多特征阴影检测方法
3.1 总变分阴影检测基本原理
本文所研究的阴影检测问题,是将阴影作为图像退化的一种特殊形式,在满足图像总变分最小的情况下,达到阴影检测的目的。总变分方法进行阴影检测的基本思想为,在满足图像总变分最小的情况下,通过抑制影像上非阴影区域像素值的变化,同时突出显示具有阴影特征的区域,可以达到阴影检测的目的。
3.2 多特征检测的基本思路
影像中的水体,由于其反射系数较小,一般呈现暗色,其亮度值与阴影区域的亮度值很接近。如果只利用亮度值特性进行检测,则会出现将水体错检为阴影的现象。由于水体对蓝色波段有较好的穿透能力,但是蓝色波段受大气散色的影响严重;绿色波段对水体的穿透能力最强。因此,对水体来说,其绿色通道与蓝色通道的亮度值有明显的不同,其差值为:

其中,ΔIs表示水体在绿色通道与蓝色通道的亮度差值,IG表示水体在绿色通道的亮度值,IB表示水体在蓝色通道的亮度值。
而一般的阴影区域则不具有这样的特征,蓝色通道、绿色通道中的亮度值相近,其亮度差值ΔIy比水体要小,即

利用这一特征差异,可以区分水体与阴影。
然而,在实验中发现,利用水体与阴影的这一特征差异,有一些影像中的阴影区域仍然不能被正确地检测出来。本文采用IKONOS实验影像分析见图1:

图1 实验原始影像
图2给出了实验所用影像中阴影G分量和B分量的亮度直方图,图3给出了实验所用影像中水体G分量和B分量的亮度直方图。对这几幅图进行分析可以发现,水体在G、B通道中的亮度差值并不比阴影区域的差值大,因此这一特征差异对于检测水体存在不足。

图2 阴影G、B分量的亮度直方图

图3 水体G、B分量的亮度直方图
针对上述不足,通过对水体与阴影的特征进行分析,并作出改进。通常情况下,水体在G通道有较高的反射率,而在R通道的反射率比较低,因此,本文利用Jin等提出的G、R通道特征值来区分水体,即利用影像的G通道与R通道的差值与其和值的商进行区分,即:

实验证明,利用这一特征可以有效地提取出水体。
具体检测流程见图4。

图4 多特征阴影检测流程图
即首先对原始影像进行总变分阴影检测,由于水体的亮度值与阴影区域的亮度值很接近,因此,在检测出的区域中包含有水体。本文通过对影像的学习,确认影像中是否包含水体,如果影像中包含有水体,则需利用公式(3)计算影像G、R通道的差值与和值之商,提取出影像中的水体。由于影像中的水体边缘比较浅,悬浮物、藻类等植物含量比较多,只利用影像的RGB三通道特征不能正确检测,需要通过影像的学习,对提取出的水体进行形态学膨胀操作,准确提取出水体的范围,从而确定阴影区域。若影像中的水体边缘无植被存在,则可直接运用公式(3)计算,提取出影像中的水体。
3.3 算法实验及结果分析
本文通过以上步骤对IKONOS遥感影像进行阴影检测,原始图像为包含水体的阴影图像。
(1)图5为待检测的原始图像,图像中包含有阴影与水体。图6为利用变分方法检测出的阴影区域(白色区域),由图可以看出,检测结果不仅包括建筑物、植被的阴影区域,还包括水体。

图5 原始影像

图6 变分法检测出的阴影区域
(2)利用G-R之差与其和的商,提取水体,如图7所示;图8为利用边长为8的方形结构元素对提取出的水体进行膨胀处理,确定的水体范围。
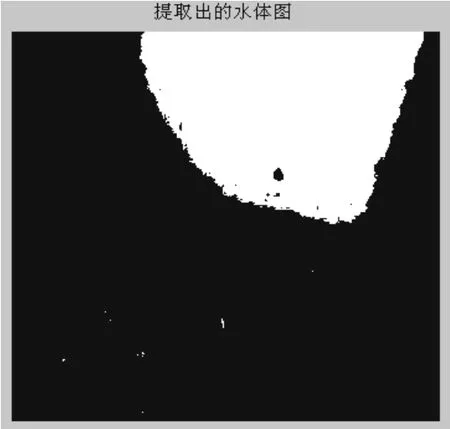
图7 利用G-R提取水体图
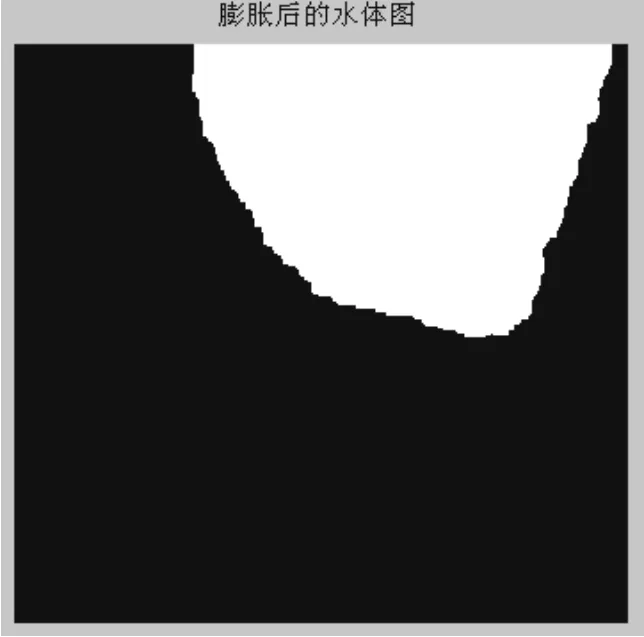
图8 膨胀后的水体图
(3)在初次检测出的阴影图中去除水体,得到最终的阴影区域,见图9、图10。
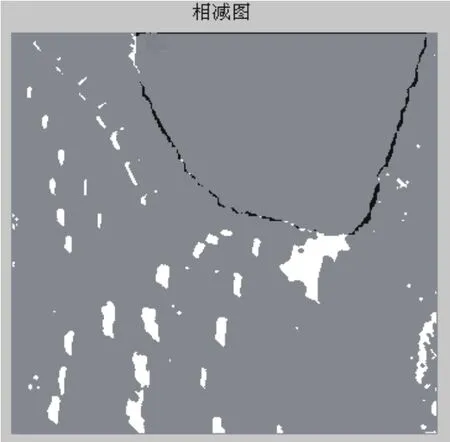
图9 去除水体后的阴影图

图10 最终的阴影区域
上述实验从目视角度可以看出,将水体与阴影的G通道与R通道的特征差异应用到遥感影像的阴影检测中可以达到区分水体与阴影的作用,去除水体后阴影区域不会受到干扰,影像细节保持完好,目视效果理想。
4 结论
本章主要针对包含与阴影区域亮度相近的地物(如水体)的影像进行阴影检测时,将该地物当作阴影区域误检的情况,提出基于总变分的多特征阴影检测方法。
检测的过程可分为两步:粗检测和去除水体。首先通过对影像的学习,了解影像的纹理性质,以及影像是否包含与阴影区域色调相近的地物,如水体。根据学习的情况,选择总变分方法进行阴影区域的粗检测,对检测结果进行分析,然后利用G-R通道亮度特性提取出水体。通过对影像的再次学习,运用形态学膨胀的方法对结果进行后续处理,确定影像的阴影区域。本章通过实验验证了该方法的有效性。
[1] 冈萨雷斯.数字图像处理[M].阮秋琦,译.北京:电子工业出版社,2007.
[2] 王树根.正射影像上阴影和遮蔽的成像机理与信息处理方法[D].武汉大学博士学位论文,2003.
[3] 陈晓秋,骆剑承,周成虎.基于多特征的遥感影像分类方法[J].遥感学报. 2004,8(3).
[4] Jin, X. and Davis, C.H. An integrated system for automatic road mapping from highresolution multi-spectral Satellite imagery by information fusion[J].Information Fusion.1999,6(4):257-273.
[5] 李艳霞,闫冬梅,徐素妍,崔玉红.基于彩色空间多特征的高空间分辨率遥感影像阴影检测[J].装备指挥技术学院学报. 2007,18(3).
[6] 老大中著.变分法基础(第二版)[M].北京:国防工业出版社,2007.
[7] 王军利.基于彩色航空影像的阴影检测算法研究[D]. 武汉大学硕士论文.2005.
[8] 江晖.水体信息自动提取遥感研究[D].武汉:中国地质大学硕士论文.2006.
Research on multi-feature Shadow Detection Algorithms Based on Total Variation
ZHANG Li-yun, JIA Xiao-min , CHEN Su-juan
(1. Shanxi Electric Power Exploration&Design Institute, Taiyan 030001, China; 2. Beijing Tsinghua 3D new technology limited company, Beijing 100085, China)
Image becomes the main source of obtaining information and important means of utilizing information towards people, because of its large quantity and high transmission speed. However, it is disturbed by noise, including shadow. In order to solve the problem of image information loss in the production, a shadow detection method based on multi-features of shadow detection was purposed. After the experiments with several real images, it shows that the multi-features shadow detection is valid.
shadow detection; multi-feature.
P237
B
1671-9913(2011)05-0034-05
2011-08-11
张力耘,男,从事数字化档案、档案数据库管理工作。