汽车电子节气门半实物仿真装置的开发
2011-01-23葛建中
葛建中
(芜湖职业技术学院机械工程系,安徽芜湖 241000)
目前,半实物仿真技术已广泛应用于各类汽车电子控制系统(包括发动机ECU和一些控制子系统)的开发。常见商品化的半实物仿真系统如dSPACE、ADRTS、MAXION 等均为国外进口产品,功能丰富、性能强大,适用于各类汽车电子控制系统的快速原型开发,但是价格极为昂贵,除了极少数能够进行产品开发的院校和公司外,一般院校如果只用于教学或普通开发则成本过高。
国产的9S12半实物仿真系统,是一套基于Sim ulink的控制系统开发及半实物仿真的软硬件工作平台,其使用方式与国外进口产品完全一致。它采用飞思卡尔9S12单片机作为实时仿真机,普通的PC机作为系统主机,具有低成本、高效率的特点,实现了与Simulink的无缝连接,能方便地实现代码生成、代码下载及试验与调试,可以完成从系统建模、分析、离线仿真到实时控制的全过程。通过综合考虑其通用性、高性价比、可移植性的特点,本文选用了该系统[1-2]。
本文研发的系统从满足汽车电子高效率开发或普通教学的实际需要出发,让用户以较小的代价仿真不同的使用环境,观察到实际车辆内部控制系统的控制过程等,辅助汽车电子节气门的设计、开发或教学,减少实车实验的工作量和成本,提高工作效率。
1 电子节气门控制系统
1.1 实际的电子节气门控制系统与结构
电子节气门是发动机 ECU根据加速踏板位置传感器、节气门位置传感器等工况信号,计算出最佳节气门开度,通过电机驱动达到优化节气门开度的目的。
实际的电子节气门控制系统如图1所示,包括加速踏板位置传感器、电子节气门体和控制器3大部分。其中,电子节气门体是由节气门定位电机、节气门位置传感器1、节气门位置传感器2以及回位弹簧等组成。
节气门定位电机一般为步进电机或直流电机,两者的控制方式也有所不同。
本系统方案选用直流电动机作为节气门的定位电机,直流电动机的速度控制采用斩波技术,通过控制脉冲宽度调制(PWM)达到控制直流电动机电枢电压的目的。控制单元通过调节脉宽调制信号的占空比来控制直流电机转角的大小,电机方向则是由和节气门相连的回位弹簧控制的。电机输出转矩和脉宽调制信号的占空比成正比,据此调节节气门开度。
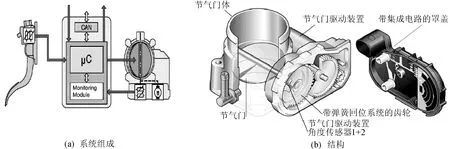
图1 电子节气门控制系统的组成与结构
1.2 电子节气门控制系统的模型
实际的电子节气门控制系统是一个复杂的非线性系统[3],其模型框图如图2所示。控制系统采集来自传感器的各种信号,根据不同的发动机运行状态和传感器信号确定期望的节气门开度。系统通过一定的反馈控制算法,控制电子节气门直流电机转矩输出,使电子节气门达到期望的开度,以实现快速准确的电子节气门控制[4]。

图2 电子节气门控制系统的模型
2 半实物仿真装置的设计
2.1 半实物仿真装置的组成
根据汽车电子教学的特点、电子节气门的工作原理与控制策略,需要在能够满足各项实验内容的前提下简化系统,设计的半实物仿真装置主要添加了一个空调开关信号来演示“基于发动机扭矩需求的节气门控制”。
本文讨论的9S12半实物仿真系统,包括硬件系统和软件系统。其中硬件系统包括9S12开发板和接口板,可以方便地实现AD、数字IO、PWM和CAN等功能;软件系统包括Simulink下的建模与实时代码生成软件包9S12toolbox、代码编译和下载软件等。
汽车电子节气门半实物仿真装置如图3所示,图3中省略了PC机以及系统与其的连线。

图3 汽车电子节气门半实物仿真装置
本装置主要由电子节气门体、加速踏板位置传感器、空调开关、接口电路板、9S12单片机开发板、上位机6个部分组成,此外为便于使用还提供了一个12 V的电源和开发板的支架。
2.2 硬件接口电路设计
2.2.1 传感器信号处理电路设计
模拟信号会带来较多的毛刺或因干扰、突发故障等产生的较大的电压波动,为了防止各种干扰进入系统,主要设计了对加速踏板位置传感器信号、节气门位置传感器信号及空调开关信号的跟随和滤波,这是整个系统抗干扰的重点部分。传感器信号处理电路共4路,由4只单电源供电的运算放大器 LM 324完成信号的跟随,外接电阻、电容组合滤波,传感器信号经过处理后与9S12单片机的AD通道直接相连。
2.2.2 驱动电路设计
本设计采用脉宽调制方式,利用功率晶体管的开关作用,形成直流斩波电路,通过改变占空比来改变节气门定位电机电枢的平均电压,调整直流电机的电枢电流,以此实时控制电机的扭矩,硬件设计中直接应用了电机专用驱动芯片MC33886和12 V电源驱动直流电机的方案。
2.3 半实物仿真系统模型的搭建
将所有输入输出设备与控制对象直接连接。通过9S12 toolbox中的实时硬件接口库,并通过Sim ulink自动生成电子节气门控制算法,下载到9S12单片机中,可方便快捷地实现电子节气门的半实物仿真。使用9S12半仿系统的“一键自动生成”的功能,建立模型,点击Simu link工具栏上的“”图标,其后的编译、生成代码、下载等所有过程全部自动完成,用户只需在下载完成后重新上电即可进行系统的仿真运行,系统信号还能实时返回上位机界面。搭建的电子节气门半实物仿真系统模型,如图4所示。

图4 搭建好的电子节气门半实物仿真系统模型
图4中,A to D Converter Channel 1为加速踏板位置传感器电阻1的信号,是系统的输入信号;A to D Converter Channel 0为节气门位置传感器电阻1的信号,是系统的反馈信号;A to D Converter Channel 3为空调开关的信号;A to D Converter Channel2为节气门位置传感器电阻2的信号,虽然采集了本信号,本文涉及的算法未考虑此信号,只是显示出来,对系统不影响;PWMA为系统对节气门定位电机 1脚的输出信号;PWM-B为系统对节气门定位电机2脚的输出信号。
3 控制算法及其调试
3.1 PID控制器及系统软件仿真
系统采用PID控制,将偏差的比例P、积分I和微分D通过线性组合构成控制量,对被控对象进行控制。

其中,KP为比例系数,成比例地反映控制系统的偏差信号e(t),偏差一旦产生,控制系统立即产生控制作用以减小偏差;T I为积分时间常数,主要用于消除静差,提高系统的无差度,积分作用的强弱取决于积分时间常数 TI,TI越大积分作用越弱,反之则越强;TD为微分时间常数,反应偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节周期。
因此,如何设置一个合理的P、I、D参数组合并精心调试优显重要。在Simulink下建立的根据PID原理图设计的软件仿真模型[5-7],如图5所示。
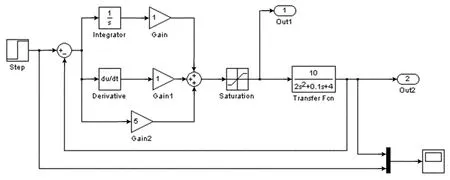
图5 PID控制软件仿真模型
如何确定传递函数是仿真成败的关键。根据已有研究成果[8],在M atlab环境中,电机电压与节气门角度的传递函数在节气门阀转角小于初始开度时,其表达式为:

其中,s是指对连续系统的拉氏变换,输出的是连续系统的传递函数模型。
3.2 仿真在电子节气门控制器设计中的应用
半实物仿真中采用PID控制策略,不用考虑传递函数的问题,因为被控对象电子节气门体直接连接在系统电路中。用Simulink设计的控制器直接去控制受控对象,可观察实际控制效果,如节气门有无卡滞、振动等现象。如果控制效果不理想,则可以利用 Sim ulink的 Function Block Parameters:PID Contro ller对话框功能,调整控制器的结构或调试控制器的参数,直至获得满意的控制效果。
调试好的控制器可以认为是实际控制器的原型,如果控制效果理想,在硬件电路上作适当的修改后便可以投入制作嵌入式控制器,生成的代码也可以直接使用,从而大大缩短开发控制器的周期,最终实现产品定型。本文提供了控制算法的调试方法后,教学时可引导学生完成模型建立到电路连接的全部过程,得到闭环系统负载和节气门的变化规律曲线和稳态闭环系统转速仿真结果,并可逐一调试控制器参数,选出一个合理的参数组合。
3.3 硬件在环测试举例
电子节气门最主要的功能是完成非线性控制,控制节气门至一个最佳的节气门开度来适应加速踏板位移量和发动机转速等行驶条件,以适应全部工作范围内良好的节气门控制和适应性[9-11]。
由于采用加速踏板位置传感器信号时,输出效果的比对并不是很明显。采用Simulink中自动产生的方波信号来模拟驾驶员操作加速踏板的动作,相当于瞬间踩加速踏板到底的工况,观察此时的节气门响应(即节气门定位电位计上的反馈电压的变化),可以明显观察出当前的控制参数是否合理。
控制模型根据上面的需求变动,如图6所示。
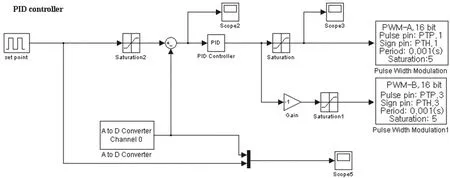
图6 用于测试控制算法的电子节气门系统控制模型
根据经验做法,先调试比例值,然后调试积分、微分的数值,且设定比例值为较大的一个数值,积分、微分的数值较小。
通过Sim ulink的Function Block Parameters对话框输入界面,输入第 1组 10、0.1、0.1组合,观察输入方波与节气门响应的比对,如图7a所示,显示出目前系统响应较快,约1/5周期节气门即可达到预定的位置,但有明显的尖峰,说明运动节气门过度,需要减小比例。
输入第2组2、0.1、0.1组合,观察输入方波与节气门响应的比对,如图7b所示,从中可以看出当前系统响应太慢,约1/2周期节气门就能达到预定的位置,需要增加比例。按照上述方法进行多次试验,观察比对效果,图7c所示的第3组4.5、0.1、0.1组合,控制效果较为理想,由此确定比例值定为4.5较合理。
按照同样的方法依次调试积分、微分的数值,观察如图7d所示的第4组4.5、1、0.1组合,其控制效果不如图7c所示的组合理想。经多次调试,第3组4.5、0.1、0.1组合的控制效果最理想,因此确定该组合为本系统的最佳控制参数。由于是基于实际机械电子系统测试,控制效果可从实际观察感知,因此利用硬件在环测试方法可以简便地测算出较为理想的PID参数组合。

图7 4组控制参数组合状态下系统对方波信号的实际响应
3.4 仿真结果分析及对策
电子节气门中的PID控制器结构相对简单并易于实现,但也容易出现超调,且在目标转角变化率较大时会出现偏差。本装置在软硬件上采取了一些必要措施,最大限度地克服了电子节气门自身由于机械结构(如弹簧等)的原因所导致的非线性影响,首先对输入指令重新整形,以形成光滑的参考信号,然后采用 PID控制器,以达到改善控制器瞬态性能的目的。
4 结束语
本电子节气门半实物仿真装置的设计、制作及硬件在环测试均达到了预期的开发效果,本系统作为低成本的汽车电子开发装置已定型并投入商品化生产。该装置能测试、观测了解实际发动机转速随节气门角度和负载转矩的实时变化,可以分析比较控制器模型控制策略的优劣并自动生成控制代码,可以仿真或测试实际车辆的电子节气门在现实环境下运行的各种参数的效果,是汽车教学及其一般开发领域理想的操作平台。
[1]薛定宇.基于Matlab/Simu link的系统仿真技术与应用[M].第2版.北京:清华大学出版社,2011:367-392.
[2]王 斌,刘昭度,吴利军,等.基于dSPACE的汽车电子节气门半实物仿真试验台[J].小型内燃机与摩托车,2007,36(4):1-4.
[3]肖卫国,尔联洁.非线性控制系统半实物仿真技术研究[J].系统仿真学报,2003,15(1):93-95.
[4]杜开明,秦大同,刘振军,等.电子节气门仿真控制[J].重庆大学学报:自然科学版,2005,28(4):14-18.
[5]张金柱,张 毅,韩玉敏.汽车电子节气门控制器仿真设计[J].黑龙江工程学院学报,2006,20(1):60-63.
[6]王玉顺,张振东.电子节气门控制系统研究[J].传动技术,2008,20(3):29-33.
[7]吴 琼,彭 忆.基于模型的汽车电子节气门控制系统研究[C]//中国智能自动化会议论文集,2009:521-526.
[8]潘 峰,薛定宇,徐心和.基于dSPACE半实物仿真技术的伺服控制研究与应用[J].系统仿真学报,2004,16(5):936-939.
[9]韩玉敏.汽车智能电子节气门控制系统的研究[J].交通科技与经济,2006(2):87-88,99.
[10]杨正宇,周美立.基于Simulink的机械系统动力学数字仿真[J].合肥工业大学学报:自然科学版,2002,25(5):688-692.
[11]张炳力,张友皇,赵 韩.基于Simulink与Stateflow的自动变速器性能仿真[J].合肥工业大学学报:自然科学版,2010,33(8):1125-1130.
