基于单频电磁制导方式的AGV小车
2011-01-22刘建锋张长胜
刘建锋,张长胜
(昆明理工大学 信息工程及自动化学院,云南 昆明 650051)
基于单频电磁制导方式的AGV小车
刘建锋,张长胜
(昆明理工大学 信息工程及自动化学院,云南 昆明 650051)
介绍了电磁制导方式,包括电磁信号的产生和检测,信号的选频放大以及TTL电平的转换。小车控制核心综合以上TTL电平信号,控制小车的行走状态以实现多点自动运输功能。根据其原理已做出了实物,并实现了基本功能,证明了该设计方案是可行的。
电磁制导;选频放大;单片机
自动导向车(AGV)是采用自动或人工方式装载货物,按设定的路线自动行驶或牵引着载货台车至指定地点,再用自动或人工方式装卸货物的工业车辆。
AGV的研究与开发集人工智能、信息处理、图像处理为一体,涉及计算机、自动控制、信息通信、机械设计和电子技术等多个学科,成为物流自动化研究的热点之一。目前,AGV仍有多项关键技术有待提高和突破,以进一步提高AGV的性能,降低制造成本和减少使用费用。本文介绍的AGV主要解决导向及定位问题。
综合成本和系统稳定性能考虑,本设计采用电磁单频导向技术结合非接触式ID卡识别定位。电磁引导介质采用柔性较好的漆包线,可不用专门开敷线槽,在试用阶段可随机根据实际情况设置线路走向(可用胶带固定引导线)。非接触式ID卡识别定位,采用PS/2接口及其传输协议(市面上有很多成熟产品),在小车上安装一个ID读卡器,该读卡器的有效距离可达15 cm,在各个站安装一张ID卡,小车经过时读卡器在MCU的控制下读出ID卡信息,即可实现定位。
采用单频电磁制导方式及非接触式ID卡读卡定位方式的优点:系统比较简单,易于维护;制造成本比较低;安装简单,引导线理论上可以只用一根完整的线。
1 基本原理
电磁探测方法如图 1所示。1、2、3都是电磁探测头,其中1、2是导向探头,3是计数探头,用来记录小车的位置。A、B为两个驱动轮,小车方向的改变由两个驱动轮的配合完成。前导向轮是没有动力的。
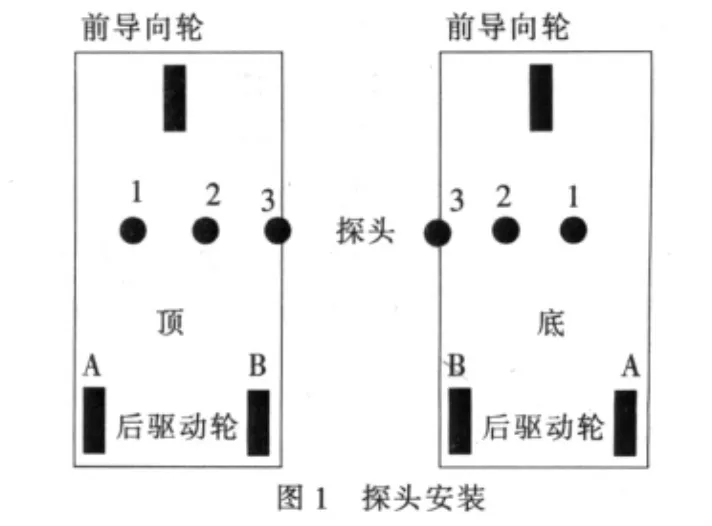
小车的驱动方式:如图1所示,小车的动力轮是后面的A、B两个驱动轮,其转向也是由这两个动力轮协调工作完成。寻线走时,当1号和2号两个探头都有信号时,小车的两个驱动轮都动,即为直走;当1号探头有信号而2号没有信号时,说明小车偏离了轨道,此时是A轮不动,B轮动,直到1、2两个探头都有信号为止;当1号没有信号而2号有信号时,A轮动,B轮不动,直到1、2两个探头都有信号为止;当两个探头都没有信号时,小车停止行走,停在原地。探头信号有无与驱动轮停与走的关系如表1所示。
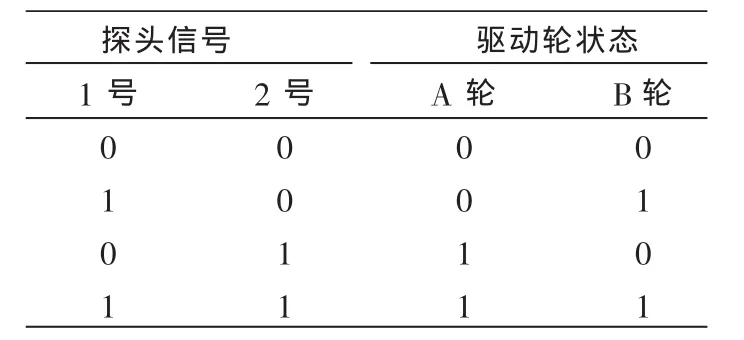
表1 探头信号与驱动轮的关系
3号探头用于定位计数,每到一个站点就通过ID卡进行识别计数定位(即每测到一次信号就计一次数),直到所计的数与MCU中计算的值相等,说明小车到达了既定位置。3号探头的关键就是计数要准确,不能误计,否则就会使整个系统不能使用(小车只能一直沿着信号线走,不能定位)。
2 硬件设计
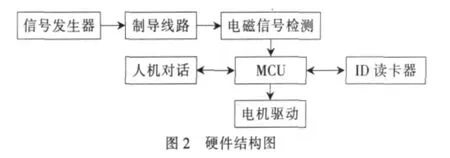
AGV小车硬件设计部分由信号发生器、制导线路、电磁信号检测、小车控制核心(MCU)、读卡器、电机驱动组成,基本的硬件结构图如图2所示。
2.1 制导线路
制导线路的设置是本设计的关键部分,如果线路没有设置好,后续的所有工作将不能完成。制导线路如图3所示,其中虚线部分是屏蔽部分。由于电磁场是矢量,当电流方向大小相同且是平行的两条线时,周围的电磁都会相互抵消,故需要将虚线部分屏蔽。该布线的关键就是要将虚线部分的屏蔽工作做好,只有这样,小车才能很好地完成寻线工作。

图3 制导线路
2.2 信号发生器
为了产生电磁信号,由信号发生器来产生交变的电信号。为了产生足够强的磁场,该信号发生器的输入输出电流不能太小,在使用专业的信号发生器来产生交变信号时,要将其设置成功率输出模式,输出电压约为3 V。
市面上的专用信号发生器的价格都比较贵,且其功能很多,而本设计因不能发挥其所有的性能,不需要那么多的功能,所以自制了一个简单的信号发生器,只能产生频率可调的且占空比不定的方波,其信号产生的基本流程如图4所示。
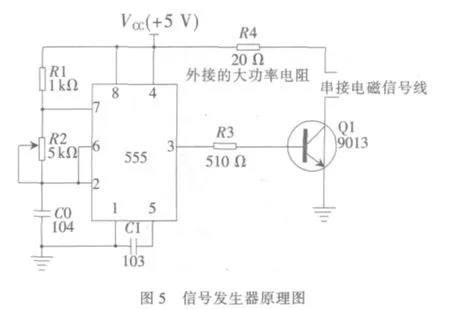
振荡信号由如图5所示的555产生。555频率可调但是占空比不可调节(会随频率变化而变化),查阅相关手册可知,555工作电压为5 V时输出的电流为100 mA。为了得到很好的寻线效果,实际的电流要大于200 mA,故需要进行功率放大,其基本电原理图如图5所示。由555及其外围电路组成的多谐振荡器,其产生方波信号频率为:

R2是可变电阻,由该公式可以计算出信号发生器的频率范围是 1.3 kHz~14.3 kHz。
2.3 非接触式读卡器
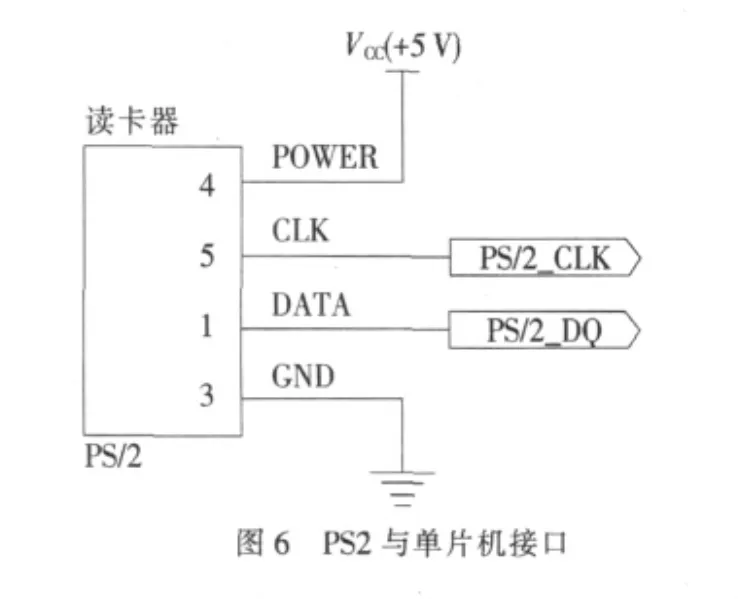
该读卡器的接口协议和电气特性与PS/2键盘是一致的,所以完全可以将该读卡器当作一个PS/2键盘来处理。
具有5脚连接器的键盘称为AT键盘,而具有6脚mini-DIN连接器的键盘则称为PS/2键盘。但实际上这两种连接器都只有4个脚有意义,分别是时钟脚(Clock)、 数 据 脚(Data)、 电 源 脚(+5 V)和 电 源 地(Ground)。在PS/2键盘与PC机的物理连接上只要保证这4根线一一对应就可以了。PS/2键盘由PC机的PS/2端口提供+5 V电源,时钟脚Clock和数据脚Data都是集电极开路的,所以必须接大阻值的上拉电阻,平时这两个脚均保持高电平,有输出时才被拉到低电平,之后自动上浮到高电平。图6的单片机是带有上接电阻的,所以PS/2可以与MCU直接连接。
2.4 小车控制核心MCU
MCU用一片AT89S51单片机来实现,51系列单片机其价格便宜、功能强大、且易学易用,唯一不足的是容易受到外界脉冲信号的干扰。但可以采用如下方式来消除脉冲信号的干扰:(1)硬件处理。首先要注重电源设计,电源要稳定可靠;其次是在单片机的电源引脚与地引脚之间加去耦电容,两个不同的电源电路连接用光电耦合隔开等。(2)软件处理。可采用指令冗余技术、拦截技术、软件看门狗等处理技术,使程序能够自动回到正常位置执行程序。
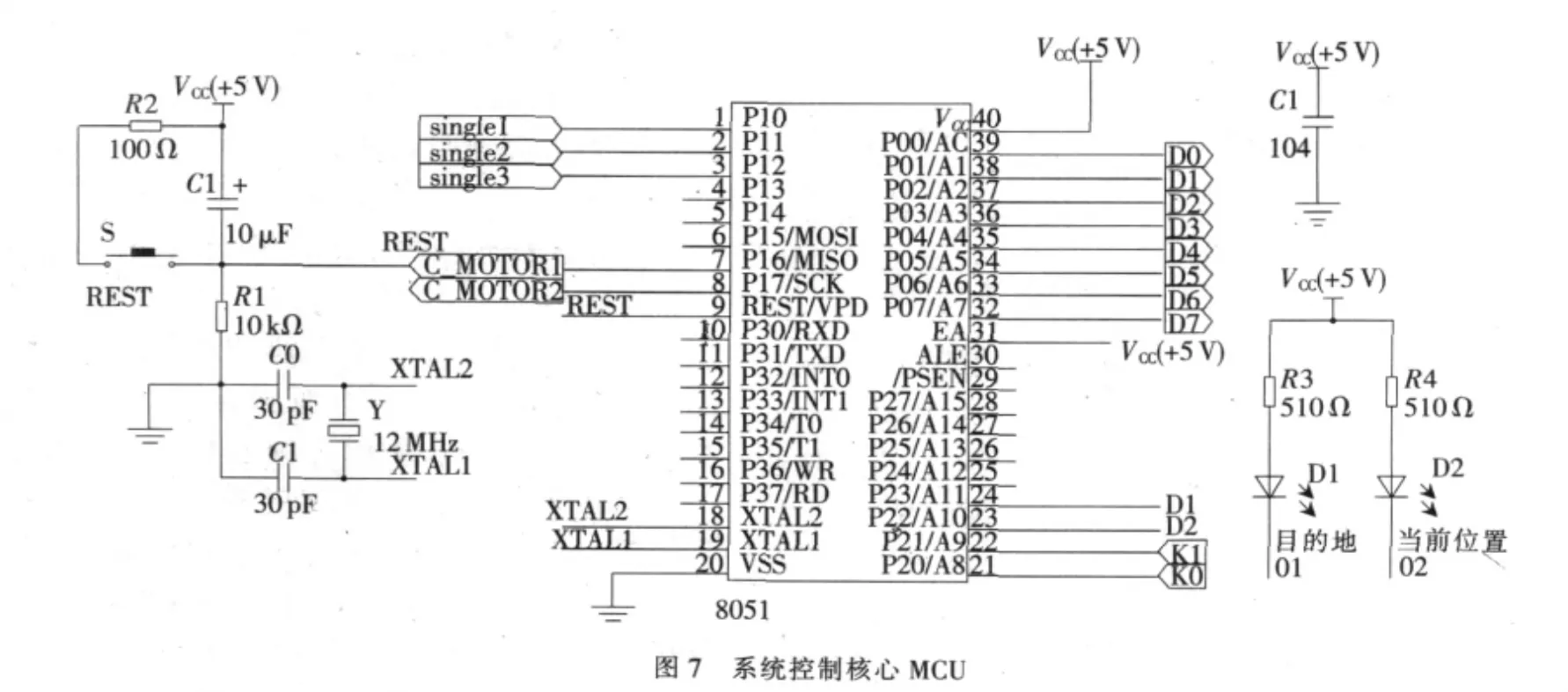
MCU引脚链接如图7所示,因为计算定时器初始值比较容易,MCU的时钟信号是用一只12 MHz晶振提供。C_MOTOR1、C_MOTOR2是电机控制信号输出端,single1~single3是电磁信号经过处理后的输入端,P0中即D0~D7是 LED数码管显示的数据端,K0、K1是键盘接口。IO口可用作以后系统扩展时用。这样MCU既满足了当前系统的要求,也为以后的扩展升级留有空间。
3 软件设计
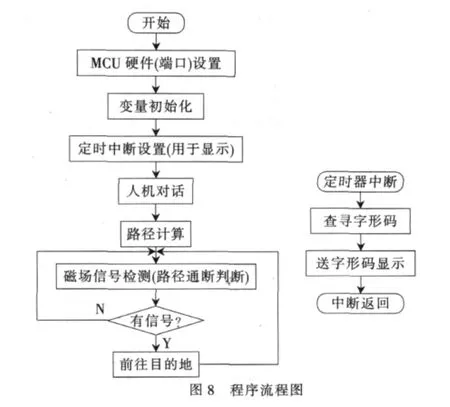
软件设计分为初始化模块、读卡器读卡模块、位置计算模块、小车行走模块(内含故障处理机制)。其程序流程如图8所示。
各模块基于结构化程序设计的思想,为了保证得到结构化的程序,可采用以下方法:自顶向下、逐步细化、模块化设计、结构化编程。在软件设计中选用了通用性比较强的C语言作为系统驱动程序的编写语言。
当从设备(PS/2)向主设备(MCU)发送数据时,首先检查时钟线,以确认时钟线是否为高电平,如果是高电平,从设备就可以开始传输数据;反之,从设备要等待获得总线的控制权,才能开始传输数据。传输的每一帧由11 bit组成,发送时序及每一位的含义如图9所示。
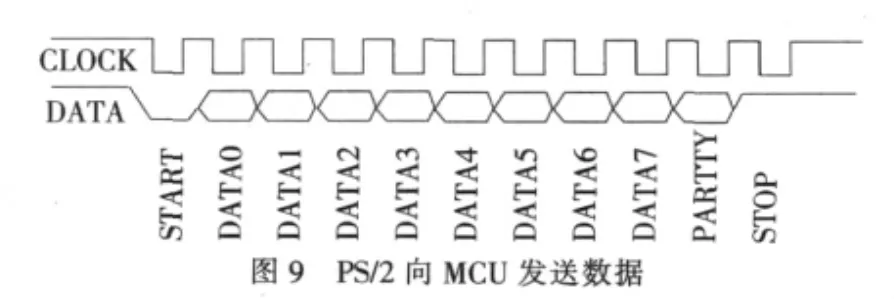
在PS/2通信过程中,MCU在时钟信号为低时发送和接收数据信号。因为MCU向键盘发送的是指令,需要键盘回应,所以这部分程序采用查询方式I。而MCU接收键盘数据时,数据线上的信号在时钟为低时已经稳定,所以这部分程序采用中断方式,且不需要在程序中加入延时程序。
4 测试结果
虽然电磁信号接收处理部分能够接收并处理信号发生器所产生的磁场信号,但是频率调节的效果并不理想。因此将信号发生器做成频率可调的,以便于信号发生器与电磁信号接收处理部分握手,以及达到在演示时能体现出电路的选频特性。
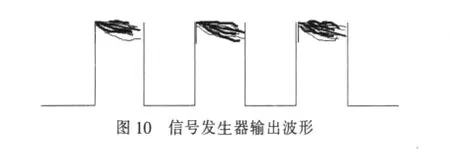
用示波器观察信号发生器的其输出波形发现,输出波形并不是很完好,有很多谐波在里面,如图10所示。由于这些谐波存在,使得该波形的带宽BW比较宽,不能很好地体现出电路的选频作用。这是因为三极管开关速度及电路焊接的问题。

本文设计的系统软硬件都已通过各种测试,与同类产品相比,该系统的突出优点是安装方便、使用成本低、引导路径的更改比较随意,这也是使用成本低的关键因素。
[1]OGATA K.现代控制工程[M].美国:普伦蒂斯-霍尔公司,1997.
[2]KASHIWABARAK,FUKUSHIMAY,OSHINOYAY,et al.非接触式的指导行钢板 [M].电气学会研究会,2003:49-54.
[3]NONAMI K,TIAN H.滑模控制的柔性转子-磁轴承系统使用的鲁棒降阶的VSS监控[M].日本:机械C工程师学会 60(571),(1994):897-905.
[4]KASHIWABARAK,FUKUSHIMAY,OSHINOYAY,et al.垂直振动的磁力边缘钢板有应用[J].东海大学学校运动工程,2004,44(1):75-81.
[5]UTKIN V I.滑模的控制和优化[M].德国:施普林格出版社,1992.
The AGV vehicle based on single frequency electromagnetism guidance
Liu Jianfeng,Zhang Changsheng
(School of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650051,China)
This paper introduced electromagnetism to lead mode,including the creation of electromagnetism,examination of electromagnetism,choose pin with signal to enlarge and convert(into TTL).Small car control core comprehensive above TTLs,control the car run or stop to realize automatic conveyance between any two function.The real object has been done according to the principle,and it works well.
electromagnetism lead;choose pin with signal enlarge;MCU
TP273+.5
A
1674-7720(2011)03-0018-04
2010-09-15)
刘建锋,男,1986年生,硕士研究生,主要研究方向:工业控制。