应用于无人直升机海洋航空磁力测量的机载GPS定位系统
2011-01-10梁冠辉纪育强
梁冠辉,纪育强,孙 强
(国家海洋局第一海洋研究所,山东 青岛266061)
应用于无人直升机海洋航空磁力测量的机载GPS定位系统
梁冠辉,纪育强,孙 强
(国家海洋局第一海洋研究所,山东 青岛266061)
无人直升机海洋航空磁力测量工作需要为磁力数据提供精确的位置和高程。根据无人直升机海洋航空磁力测量的实际工作环境和对定位精度的要求,设计了该机载单频GPS定位系统,并进行了模拟试验和野外试验,处理GPS数据采用商业软件。试验结果表明:该机载GPS定位系统满足定位精度要求,可应用于无人直升机海洋航空磁力测量。
无人直升机;单频GPS;高程
无人直升机海洋航空磁力测量工作需要获取水平精度优于2 m的动态位置并进行精度优于50 cm的动态高程测量,用于磁力数据的定位与校正。GPS不但可以进行三维坐标测量而且具有易于安装、定位精度高、工作效率高的特点,因此本文采用GPS作为整个磁力测量系统的定位系统。
商业GPS接收机由于质量和体积较大、抗震性能差,不适合安装于无人直升机平台。该系统中的单频GPS接收机内嵌于工业控制计算机PC104,适用于无人直升机海洋磁力测量。在较小范围内(<20 km),该系统获取的单频GPS数据经过差分处理所得经纬度精度可达到分米级别、高程精度优于50 cm。
1 系统设计
用于飞机测量高程的仪器有:气压高度表、无线电高度表、机载雷达和机载激光测高仪等,以上仪器仅能进行高程测量[1-3],GPS在进行高程测量的同时还可以进行经纬度测量,获取飞机的三维坐标,其工作原理如下。
GPS主要由三部分组成:空间星座、地面监控和用户设备。空间星座由24颗GPS卫星组成,用户设备主要包括GPS接收机硬件和数据处理软件。GPS卫星向地面发射频率为1 575.42 MHz和1 227.40 MHz的信号,GPS接收机接收信号并对其进行解算,求得卫星与接收机之间的距离,这样在地球直角坐标系下可得如下观测方程组:

式中:Di为各个卫星到接收机的距离;(Xi,Yi,Zi)为各个卫星的坐标;c为卫星信号的传播速度;Ti为各个卫星的钟差。 接收机坐标值(X0,Y0,Z0)以及接收机钟差 T0为未知数,当GPS接收机接收到4颗或者4颗以上的卫星,式(1)的方程组可解算出以上未知数,即求得接收机的三维坐标。
GPS定位方法按照参考点的不同位置可以分为:单点定位和差分定位。单点定位的精度为米级,差分定位的精度达到厘米级,这是因为差分定位比单点定位能够更有效地消除或减弱卫星的轨道误差、卫星钟差、接收机钟差及电离层、对流层的折射误差等误差。差分定位按照观测量不同分为测码伪距差分定位和测相伪距差分定位,测相伪距差分定位的精度要高于测码伪距差分定位;按照数据处理方式不同分为实时处理和测后处理[1],磁力测量工作无需实时处理数据,因此机载GPS定位系统采用测相伪距动态差分后处理的工作模式。工作模式示意图如图1所示。

图1 机载差分GPS工作模式示意图
机载GPS定位系统由两部分组成:基准站和流动站。基准站采集双频GPS数据并以文本方式存储双频观测数据,流动站采集单频GPS数据,同样以文本方式存储单频观测数据,事后将二者数据转存至PC机,并使用商业软件进行差分处理。该机载GPS定位系统的设计要求为:水平定位精度要求2 m,高程定位精度要求为0.5 m,数据更新率要求为10 Hz。
按照系统设计要求,基准站采用商业双频GPS接收机LEICA SR530 Geodetic RTK Receiver,其数据更新率最高达到10 Hz,静态定位精度为:3 mm+0.5 ppm。流动站采用本文基于Novatel OEMV1 card设计的机载单频GPS接收机,OEMV1 card标称差分定位精度为0.45 m,数据更新率最高为20 Hz。单频GPS接收机主要包括:单频GPS天线、OEMV1 card和 PC104工控机,OEMV1 card内嵌于PC104工控机,单频GPS天线和PC104工控机安装于无人直升机。系统组成框图如图2所示。

图2 机载GPS定位系统组成框图
2 定位精度验证试验
为了验证该机载单频GPS定位系统的定位精度,本文进行了两种试验:模拟试验和野外试验。
处理试验数据使用商业软件TTC(Trimble Total Control)。 使用的星历为 IGS(International GNSS Service)提供的轨道精度为5 cm的精密星历。首先对观测数据进行预处理,扫描基站和流动站观测数据,剔除二者共同观测时间很短的卫星和出现卫星失锁的观测时段,改善观测质量[2],然后使用TTC软件的整周模糊度在航解算OTF(Ambiguity Resolution on the Fly)模式处理观测数据。
模拟试验的目的是验证OEM板卡的标称精度。试验场地设在青岛市内,基线长度约为150 m,模拟试验每组数据的观测时间约为6 h。选取其中4组数据进行分析,表1为4组数据的动态三维均方根误差(RMS)最大值,所有历元的经度和纬度RMS值都小于5 cm,高程RMS值都小于10 cm,优于该OEM板卡标称定位精度。

表1 模拟试验各组数据所有历元三维RMS最大值表(单位:m)
野外试验是为了验证单频GPS定位系统机载环境下的定位精度。试验场地设在东营海边,机载单频GPS接收机以无人直升机为运动载体,移动速度在6~15 m/s范围内,无人直升机航线为设定的磁力测线,飞行过程中,GPS基线长度在1~13 km范围内。野外试验每组数据为每个航次的数据,观测时间约为40 min。同样选取试验中四组数据进行分析,其动态三维RMS最大值如表2所示。图3为选取其中一组进行作图分析,图3(a)为该组数据所有历元的高程值序列,图3(b)~(d)为所有历元的三维RMS值序列[3]。

表2 野外试验各组数据所有历元三维RMS最大值表(单位:m)
表2中野外试验数据所有历元的经纬度RMS值均小于10 cm,高程RMS值均小于50 cm,满足磁力测量工作的要求。比较图3(a)中高程变化趋势与图3(b)~(d)中三维RMS值变化趋势可知:在飞行过程中,无人直升机起飞及爬升过程中姿态变化较大,导致三维RMS值较大。无人直升机固定高度飞行后,姿态平稳,则三维RMS值趋于稳定且幅值降低,因此可推断无人直升机飞行姿态是影响动态高程精度的主要因素之一。


图3 野外试验数据高程及三维RMS值
在进行模拟试验的过程中,存在高程值偏差较大的试验数据,其部分历元的高程RMS值超过0.5 m,不满足定位精度的要求。选取其中一组进行分析如图4所示,图4(a)为该组数据所有历元高程值,图4(b)为所有历元高程RMS值,该组数据所有历元的位置精度因子(PDOP值)如图5所示。

图4 未满足定位精度数据的高程及RMS值
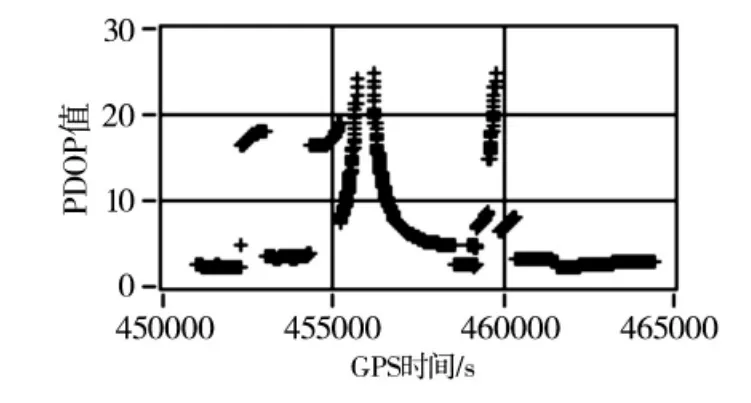
图5 未满足定位精度数据的PDOP值
对比图4和图5中幅值较大的时刻可知高程值出现较大偏差的时刻、高程RMS值较大的时刻与PDOP值偏大的时刻符合,由此可推断卫星的观测质量是影响定位动态差分定位精度主要因素之一。试验场地周围建筑物对基站和流动站共同观测卫星的信号产生遮挡,而且基站和流动站共同观测的卫星存在升降,使观测卫星出现失锁现象,都会降低定位精度。因此在进行野外磁力测量工作中基站的选址应该保证飞行过程中基站和流动站共同观测的卫星不被遮挡,同时工作时间避开观测卫星升降的时刻。
3 结论
通过对该机载GPS定位系统进行的精度验证试验及试验结果可以得出如下结论:该机载单频GPS定位系统以无人直升机为运动载体可以完整采集动态单频GPS数据并保存数据文件,使用TTC软件对观测数据进行差分处理,得到的经纬度定位精度优于10 cm,高程测量精度优于50 cm,满足系统设计要求。因此该机载单频GPS定位系统可应用于无人直升机海洋航空磁力测量。
[1]张峰,于海龙.飞机测高天线的设计[J].空间电子技术,2010(3):90.
[2]姚怡,黄智刚,李锐.便携式气压高度计研制及误差修正技术研究[J].遥测遥控,2009,30(6):48.
[3]王少云.无线电高度表静态模拟测高试验结果分析[J].数据采集与处理,2006,21(3):371.
[4]周忠谟,易杰军,周琪,等.GPS卫星测量原理与应用[M].北京:测绘出版社,1997:125-139.
[5]魏二虎,黄劲松.GPS测量操作与数据处理[M].武汉:武汉大学出版社,2004:71.
[6] 张小红.动态精度单点定位(PPP)的精度分析[J].全球定位系统,2006(1):8-10.
Airborne GPS Positioning System in Unmanned Helicopter Used for Marine Aeromagnetic Survey
LIANG Guan-hui,JI Yu-qiang,SUN Qiang
(The First Institute of Oceanography,SOA,Qingdao Shandong 266061,China)
Unmanned helicopter marine aeromagnetic survey needs precise location and elevation for the magnetic data.Considering the working condition and the requirement for the position accuracy,the airborne single-frequency GPS positioning system is designed.The simulation experiments and experiments on the sea have been performed.The results of experiments indicate that the airborne GPS positioning system could satisfy the accuracy requirement and could be applied to the unmanned helicopter marine aeromagnetic survey.
unmanned helicopter;single-frequency GPS;elevation
P715
A
1003-2029(2011)03-0043-04
2011-02-21
基于无人机的海洋航空磁力探测系统研制(2007AA09Z319)
梁冠辉(1985-),男,硕士研究生,主要从事系统研制开发工作。
