旋转导向钻井稳定平台摩擦模型参数辨识研究
2011-01-05王艳丽袁立志
王艳丽 葛 蕾 袁立志
(1.陕西科技大学镐京学院 陕西西安) (2.长庆油田分公司技术监测中心 陕西西安)(3.川庆钻探工程有限公司长庆钻井总公司 陕西西安)
旋转导向钻井稳定平台摩擦模型参数辨识研究
王艳丽1葛 蕾2袁立志3
(1.陕西科技大学镐京学院 陕西西安) (2.长庆油田分公司技术监测中心 陕西西安)(3.川庆钻探工程有限公司长庆钻井总公司 陕西西安)
通过对旋转导向钻井稳定平台中摩擦现象的深入研究,确定了能够全面描述此摩擦现象的摩擦模型。并提出了采用神经网络的方法对其参数进行辨识,且利用MATLAB软件进行了仿真研究,仿真实验表明神经网络参数辨识的精度更高,这对提高平台的稳定性及自适应性有很大帮助。
稳定平台;LuGre摩擦模型;神经网络辨识
0 引 言
旋转导向钻进技术可以自动、灵活地调整井斜和方位,且具有轨迹控制精度高,井眼净化效果好、位移延伸能力强等特点,是导向钻井技术一次质的飞跃[1]。其中稳定平台是旋转导向钻井系统中的一个重要环节,但它是一个复杂的时变的非线性系统,且受多种因素的影响,诸如泥浆排量的大小、盘阀接触面积的大小、盘阀弹簧力的大小以及稳定平台自身机械结构和控制仓内元器件特性等。于是,就必须对各子系统建立不同近似程度的反映系统不同运动状态下的数学模型,从而进行系统的仿真和分析,以确保系统的各项性能达到钻井技术指标,满足设计要求。通过辨识数学模型,可以优选设计参数、预测系统性能、减少实物试验次数,从而大大节省研制经费。因此,模型参数的辨识在稳定平台的设计及控制中就显得尤为重要。
1 稳定平台中摩擦模型的确立
1.1 稳定平台中的摩擦现象
要使稳定平台能够在旋转的钻柱内保持稳定,就必须使施加到平台上的力矩平衡。工作中的稳定平台受到一个正向力矩MF和一个反向力矩ML的共同作用。其中正向力矩MF为下涡轮发电机产生的控制力矩;反向力矩ML主要包括上涡轮发电机产生的摩擦力矩、稳定平台主支撑轴承的摩擦阻力扭矩、涡轮发电机和扭矩发生器上两个涡轮支撑轴承的摩擦阻力扭矩、控制主轴旋转时的惯性扭矩及液压控制分配单元上下盘阀之间的摩擦扭矩等。稳定平台的受力如图1所示[2]。
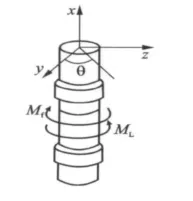
图1 稳定平台受力示意图
1.2 LuGre模型
LuGre摩擦模型是Canudas[3]等人在 1995年提出来的,其旋转运动的表达式为[4]:



式中,.θ为摩擦表面的相对角速度,rad/s;Tf为摩擦力矩,N·m;Tc为库伦摩擦力矩,N·m;Ts为最大静摩擦力矩,N·m;σ0为运动前的微观变形量z的刚性系数,N·m/rad;z为粘滞状态下相对运动表面间的相对形变量,rad;σ1为粘性阻尼系,N·m/(rad·s-1);B为粘性摩擦系数,N·m/(rad·s-1)。
由于LuGre模型不仅考虑了粘性摩擦、库仑摩擦,而且考虑了静态摩擦以及Stribeck负斜率效应,因此,LuGre摩擦模型能够较全面的描述稳定平台中的摩擦现象。
2 基于权值边界问题的神经网络参数辨识
2.1 网络模型结构
为了使所构造的神经网络模型与待辨识参数的系统的结构一致,因此需在了解系统数学模型的基础上构造出神经网络的拓扑结构。对于一般的系统模型,可以遵循以下原则:
(1)一般的BP网络中各神经元的激励函数要求为各个输入信号的加权和的函数。在这里可以将激励函数放宽为对各个输入作任意运算后的函数。即Y=f[φ(X)],式中Y是网络的输出,X是网络的输入,f(k)是激活函数,φ(X)是任意函数,由实际系统确定。
(2)神经元的激励函数一般采用系统模型中特定的函数,偏差通常取b=0。
(3)网络的权值取为待辨识的系统参数,或者取为待辨识参数的函数。
根据以上规定,可以用若干个简单的神经元及包含其参数的权值通过一定的连接方式来表示一个复杂的系统。图2为一通用的神经网络系统参数辨识模型。
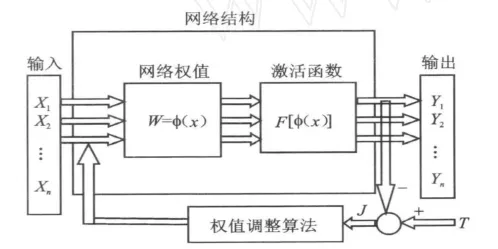
图2 神经网络参数辨识通用模型
2.2 参数辨识步骤
基于权值边界问题的神经网络系统参数辨识算法总结如下:
(1)取初始权值W(0),使其介于上下界之间;
(2)通过构造的神经网络模型,计算神经网络的输出^y(k);
(3)结合神经网络输出,计算误差函数e(k)=y(k)-^y(k);
(4)将神经网络权值调整为:W(k+1)=W(k)+ΔW(k);
(5)分析权值是否在允许范围内,如果是转到第(6)步;如果不是则:
如果Wimax<Wi,Wi=Wimax
如果Wi<Wimin≧Wi=Wimin
(6)E(W,k)=计算,并且判断其是否在允许误差范围内,如果在,则停止辨识。如果不是转到第(3)步。
3 稳定平台摩擦模型参数辨识
3.1 含有Lugre摩擦模型的伺服系统
含有Lugre模型的导向钻井稳定平台结构如图3所示。

图3 含有Lugre模型的导向钻井稳定平台
其中,r(t)为指令信号,.θ(t)为转速,R为电枢电阻,Km为电机力矩系数,J为转动惯量,T为控制输入,Tf为摩擦力矩。
稳定平台伺服系统,可以用下面的微分方程表示:

Tf为式(1)所示的Lugre摩擦力矩。
3.2 Lugre模型参数辨识
3.2.1 静态参数辨识

再将式(3)代入式(7)可以得到与稳态相对应的摩擦力矩和角速度之间的关系

非线性最小二乘法就是将低速和高速阶段的点分别拟合成一条直线,低速直线与纵轴交点值为最大静摩擦力矩,高速直线与纵轴交点值为y=TC库仑摩擦力矩,其斜率为粘滞摩擦系数,低速直线与直线交点的横坐标值即为临界角速度。根据表1的角速度θi及相对应的摩擦力矩Tssi,采用MATLAB中的lsqcurvefit[5]来实现参数的辨识。
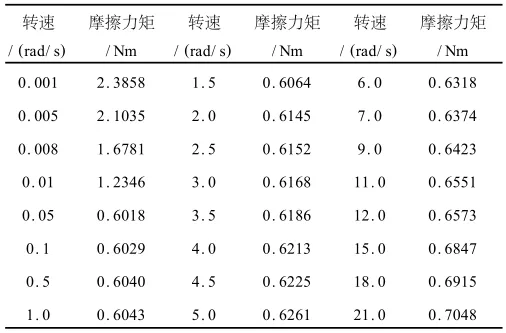
表1 摩擦力矩与转速之间的稳态对应关系
根据非线性最小二乘法拟合的Stribeck曲线可以得到Lugre摩擦模型的4个静态参数Ts、Tc、.θs、B分别为2.4440、0.5991、0.0103、0.0049。
3.2.2 动态参数辨识
1)神经网络参数辨识
由前面的分析知道,当系统受到控制力,但还没有明显的运动时,可假设:,因此式(1)可近似写为:Tf=σ0θ+σ1θ.+Bθ.。此时的系统模型可以写为:
对于动态参数的辨识,本文采用基于权值边界问题的神经网络参数辨识法,且静态参数的取值为前面得到的静态参数辨识结果,并且取J=1 N·m2。根据以往经验和理论计算,可以得到Wi的范围。其中最大值和最小值数分别为Wmax=[4,2,3,4,5,2]′;Wmin=[-5,-3,-4,-2,-3,-2]′。使用神经网络作为系统参数辨识器NNI,根据待辨识系数的上下界,并在界内选择一组初始值W(0),W(0)=[-3,1,2,2,3,1]′使其介于最大值与最小值之间。并建立该系统的神经网络模型如图4所示,神经网络的输入由系统输入θ(k)和系统输出T(k)组成。最后根据基于权值边界问题的神经网络参数辨识步骤对其参数Wi进行辨识。
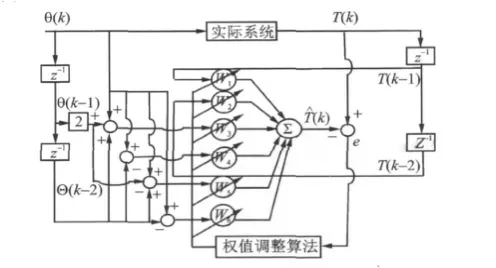
图4 神经网络辨识模型
训练结束后的神经网络的权值为:W=[-2.0053,-0.9974,0.5103,0.3818,1.0048,0.0073],此权值即为所要辨识的系统参数值。得到刚性系数σ0,粘性阻尼系数σ1。
2)非线性最小二乘法辨识
从式(10)可以看出,当系统受到控制力,仍处于静止状态时,可近似为一个二阶阻尼系统。其系数可以近似的计算出来,当运动停止时有:

θs为静摩擦区域的稳态角位移,根据静摩擦的辨识结果,输入一个很小的的阶跃信号,得到θs,从而得出σ0的初值σ00=0.46。对于J¨θ+(σ1+B).θ+σ0θ=T所表示的二阶系统,σ0+B描述了系统的阻尼,从经验可以知道阻尼系数取0.2~0.8,本文取0.2,则:

根据式(14)就可以得出σ1的初值σ10=0.27。
在已知σ0,σ1初值的情况下根据下式

可以辨识出σ0,σ1的值。
利用MATLAB中的fminbnd[5]函数取式(14)为目标函数,进行优化得到σ0,σ1的辨识值。其分别为σ0=0.4766,σ1=0.2701。
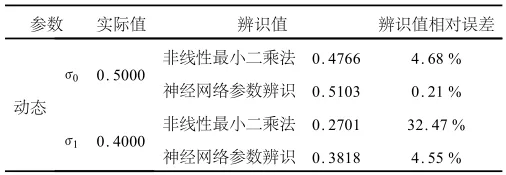
表2 动态参数辨识结果
通过表2可以看出,在动态参数辨识过程中,非线性最小二乘算法辨识相对误差较大,与其相比较神经网络参数辨识的精度要高很多。
4 结 论
本文通过对稳定平台中的摩擦模型参数采用传统辨识方法和神经网络辨识方法的比较表明,采用神经网络方法能使系统在实际输入信号下能够更好地再现实际系统的输出,尽而达到提高平台的稳定性及自适应性的目的。
[1] 赵金海,唐代绪,朱全塔,等.国外典型的旋转导向钻井系统[J].国外油田工程,2002,18(11)
[2] 汤 楠,穆向阳.调制式旋转导向钻井工具稳定平台控制机构研究[J].石油钻采工艺,2003,25(3)
[3] C Canudas de Wit.H Olsson KJ Astrom and P Lischinsky.A New Model for Control of Systemswith Friction[J].IEEE Trans.on Automatic Control,1995.40(3)
[4] 王喜明,刘 红,高 伟.基于LuGre模型的摩擦力补偿的研究[J].科学技术与工程,2007,7(5)
[5] 葛哲学.精通MATLAB[M].北京:电子工业出版社,2000
TP183
B
1004-9134(2011)04-0083-03
王艳丽,女,1983年生,助教,2009年毕业于西安石油大学检测技术与自动化装置专业,现任教于陕西科技大学镐京学院,研究方向:模糊控制。邮编:712046
2011-03-18编辑刘雅铭)
·方法研究·