一种基于生理双向调节机制的协同进化算法
2011-01-03王君红丁永生夏伯锴
刘 宝,王君红,丁永生,夏伯锴
(1.中国石油大学信息与控制工程学院,山东 青岛 266555;2.东华大学信息科学与技术学院,上海 201620;3.数字化纺织服装技术教育部工程研究中心,上海 201620)
一种基于生理双向调节机制的协同进化算法
刘 宝1,王君红1,丁永生2,3,夏伯锴1
(1.中国石油大学信息与控制工程学院,山东 青岛 266555;2.东华大学信息科学与技术学院,上海 201620;3.数字化纺织服装技术教育部工程研究中心,上海 201620)
为了提高多参数寻优效果,基于人体生理双向协同网络调节机制,提出一种网络协同优化算法(NCEA)。对应相应生理系统设计其体系结构,具体包括监控管理级、协同调节级和群体搜索级:监控管理级根据适应度和群体分布密度等信息,发送协同指令给协同调节级;协同调节级根据协同调节指令,基于生理调节规律实时调整各个搜索群体的交叉和变异概率因子和搜索群体之间的个体交换概率,以及辅助群体的个体均匀化;群体搜索级包括主搜索群体和辅助群体,其中辅助群体为主群体提供优良个体,并避免搜索陷入局部最优。最后采用两个典型的多维非线性函数,检验NCEA的搜索精度和收敛速度,并应用于一种非线性智能优化控制器。试验结果表明,与标准的遗传算法和一种改进的遗传算法相比,NCEA具有较快的收敛速度和搜索精度。
遗传算法;协同进化;交叉;变异
遗传算法(GA)是一种仿生优化算法,从20世纪90 年代涌现出小生境[1-3]、微种群[4-5]等改进算法,但仍存在多参数寻优速度慢和精度差等问题[6]。人体双向协同网络调控机制使得生理指标调控过程具有自适应性、协同性和稳定性等[5-10]。文献[10-11]中提出了基于生理调控机制的单种群遗传算法。笔者在此基础上,基于生物双向协同调控机制,提出一种非线性多种群协同进化算法(NCEA)。
1 人体生理网络双向协同调节机制
在人体信息系统中,神经、内分泌和免疫三大系统之间存在着复杂的双向调节机制,彼此之间通过细胞因子、激素和神经递质进行双向信息传递和相互作用,使人体内部的各种生理指标处于一种稳定状态[7-8]。免疫系统作为中枢神经系统的感受器官,感知体内环境的化学性和生物性动态变化,神经内分泌对此作精确的调控,保障内环境稳定,具有高度自适应性、协同性和稳定性等特点。神经网络处于整个控制网络的最高层,内分泌系统和免疫系统接受神经系统的协调控制。当机体受到外来抗原的侵袭时,免疫系统首先通过免疫应答来清除外界抗原,同时,免疫系统的实时状态通过细胞因子反馈给神经系统和内分泌系统,神经系统和内分泌系统分别通过神经递质和多种激素来共同调节免疫系统消除抗原过程,从而使抗原得以快速消除。
在人体信息调控系统具体调控某一生理指标过程中,又具有增强和抑制双向协同网络调控的特点。这种生物双向协同网络调控机制是一种非常特殊的网络调控机制,对多项人体生理指标的调控起着重要作用。按照中医理论,对人体生命活动或各项生理指标调节起促动和增强作用的是体内内分泌系统中的交感神经网络,而起制动和抑制作用的是体内副交感神经网络。当增强作用大于抑制作用时,生命活动的机体免疫力增强,代谢加快等;反之,生命活动受到抑制。在大脑中枢神经系统整体调控下,交感神经网络和副交感神经网络构成了一种相互协同、相互抑制的双向协同网络调控系统。在这种生物双向协同网络调控机制作用下,人体的多项生理指标能够快速、稳定地达到生理稳态,并具有很强的鲁棒性和稳定性[7-10]。
2 多种群协同进化算法(NCEA)设计
2.1 NCEA体系架构
首先根据人体生理网络双向协同调节机制设计NCEA的体系结构,具体如图1所示。依据神经内分泌免疫系统的调节机制特点,对应神经系统,设计高级监控级;对应内分泌系统,设计协同调节级,其中协同调节级包括增强协同和抑制协同两个单元;对应免疫系统设计搜索群体,该搜索群体由主群、辅助群A和辅助群B等组成。

图1 NCEA优化算法体系架构Fig.1 Architecture of NCEA
高级监控级根据搜索群体反馈来的群体适应度信息,发送协同指令给协同调节级;协同调节级根据高级监控级发送来的指令和搜索群反馈来的适应度、个体分布等信息,协同调节主群、辅助群A和辅助群B的个体交换、复制、交叉和变异等操作。最初搜索阶段,个体适应度和个体分布多样性较好,抑制作用大于增强作用,主要是增强种群多样性;当进入搜索中后期的时候,个体适应度和个体分布趋向统一,为了提高种群多样性和保证避免陷入局部极值点和搜索精度,增强作用大于抑制作用,主要是增强种群的聚集性。这样,主搜索群体的收敛速度和精度等性能得以提高。
2.2 NCEA算法原理
2.2.1 高级监控级及算法
高级监控级根据搜索群体反馈来的搜索群体的个体平均适应度和分布均匀度等信息,给协同调节级发送协同信号,包括调整主群和辅助群的个体分布均匀度,以及交叉和变异概率因子。当辅助群体A和B反馈来的群体个体均匀度低于标准值时,协同控制级发送均匀化命令到辅助群体个体。根据主群体平均适应度的变化率和搜索精度,高级监控级发送调节交叉因子和变异因子的命令给协同控制级。
2.2.2 协同控制级及算法
在协同调节级的增强和抑制协同作用下,主群能够保持较快的进化速度,辅助群A和B均能够保持个体均匀分布和自适应调节搜索群体的交叉和变异因子。
为了保证个体的多样性和先进性,搜索主群与辅助群体A之间和搜索主群与辅助群体B之间,以及辅助群体A与B之间需要保持适度的个体交换。其具体交换规律如下:
(1)主群体与辅助群体A之间。辅助群体A中适应度优良排序前ω%(ω为正实数)的优良个体,替换主群体适应度排序后ω%的个体,而辅助群体A中的空缺个体通过随机方式产生,这样使群体个体始终保持新鲜生命力。
(2)主群体与辅助群体B之间的个体交换。交换规律同辅助群体A与主群体的交换规律。
(3)辅助群体A与辅助群体B之间的个体交换。两者之间采用随机概率γ进行个体交换。
设fmax(i),fav(i)(i=1,…,N,其中N为总搜索代数)分别是每一代个体的最大适应度和平均适应度。根据每一代个体的最大适应度和平均适应度以及与进化代数之间的关系,设计如下搜索指标α(i):

式中,k为当前进化代数。显然,0.0≤ α(i)≤1.0。
在进行最初搜索的时候,每一代里的个体多样性较好,α(i)数值较大。当进入中后期搜索的时候,个体趋向统一,α(i)数值较小,甚至接近0。因此,可以依据α(i)的数值来决定增强和抑制协同规律。
(1)当0.7≤α(i)<1时,即处于大约前1/5~1/3的搜索阶段,抑制协同作用大于增强协同作用。在此期间以相对较低的变异概率和相对较高的交叉概率、搜索群体以较低的交换概率,即可保证个体的多样性和分布的均匀性,并加快收敛速度。
(2)当0.5≤α(i)<0.7时,基本保持前阶段的交叉和变异概率、搜索群体交换概率不变,或以较缓的速率变化。
(3)当0≤α(i)<0.5时,增强协同作用大于抑制协同作用,保持较高的变异概率和相对较低的交叉概率、搜索群体交换概率,保证适当的个体的多样性和分布均匀性,避免陷入局部极值点,提高搜索精度。
2.2.2.1 增强协同规律
根据上述要求,并参考生物激素分泌调节规律[7],选择搜索指数α(i)为激励因子,设计如下增强协同规律:

式中,R(α(i))为增强因子。
2.2.2.2 抑制协同规律

2.2.2.3 协同调节搜索群体的交叉和变异概率

2.2.2.4 协同调节辅助群体的个体交换概率
辅助群体A、B之间的个体交换概率变化规律为
按照上述调节规律,协同调控级能够根据主群的搜索指标α(i)变化情况,实时协同调节交叉、变异概率和搜索群体之间的交换概率。
2.2.3 搜索群体算法
主群体主要承担其所属个体的复制、交叉和变异等进化任务,是完成优化搜索的主要运算群体。辅助群体A和B在保持个体均匀分布的基础上主要承担大规模个体交叉和变异工作任务,这样辅助群体A、B能够为主群体提供适应度比较高的新个体,提高搜索精度,并能够避免陷入局部极值点。辅助群体A和B主要通过大范围交叉和变异产生适应度比较高的个体。
2.2.3.1 辅助群体A及其算法
为保证初始群体的均匀性,首先将搜索空间进行等分,然后在每个子空间均匀产生等数量个体。设某参数的搜索区间是[a,b],如果需要进行l等分,则每个子空间为[a',a'+(b - a)/l],其中a'为子空间的左区间,a、b、a'、l均为实数。设每个子空间产生的平均个体数量为υ0,如果在区间[a,b]需要产生n个个体(n>1),则在每个子空间产生的平均个体数量为υ0=n/l。
设每个子空间的个体分布密度为ηi(i表示子空间序号)。根据产生初始群体的划分子空间及其对应的平均个体数量υ0,设每个子空间的实际分布个体数量为υi,则其个体分布密度为ηi=υi/υ0。群体的个体均匀度定义为

式中,maxηi和minηi分别表示所有子空间分布个体分布密度的最大值和最小值。ηtotal越大,表明分布均匀度越差;反之,均匀度越好。
如果接收到协同调节级发送来的调整均匀度命令,则对群体个体进行均匀化操作。根据每个子空间的平均个体数量υ0和每个子区间的分布密度ηi,在高密度子区间删除多余平均个体数量的个体,在低密度子区间则重新随机产生少于平均个体数量的个体。
2.2.3.2 辅助群体B及其算法
按照与辅助群A产生初始群体相同的算法,辅助群B产生初始均匀个体。如果接收到协同调节级的个体均匀化命令,则进行均匀化操作处理,具体流程同辅助群体A的均匀化操作过程。为了加快收敛速度或增加个体多样性,其变异因子Pm-b按照主群体平均适应度实时变化(如式(5)所示)。
2.2.3.3 主搜索群体及其算法
为了保证种群的高度多样性和优良性,进而提高进化速度和避免早熟现象,使主群体能够充分发挥优良个体的作用,进行如下设计:
(1)与辅助群体A与B进行优良个体交换。辅助群体A和B中适应度优良排序前ω% 的优良个体替换主群体适应度排序后ω% 的个体,而辅助群体A和B中的空缺个体,通过与产生初始群体相同的随机方式产生,这样使群体个体始终保持新鲜生命力。
(2)父代个体的产生、交叉和变异。具体操作过程参见文献[10,11]。
为了加快收敛速度或增加个体多样性,主群的交叉、变异概率因子,由协同调节级根据主群个体的搜索指数α(i)的变化实时输出(具体如式(4)和(5)所示)。这样通过个体交换、选取父代个体、复制交叉和变异过程产生的新个体组成下一代种群。
2.3 NCEA算法流程
(1)个体定义编码。把所有待辨识的参数组成个体,并分别采用二进制或实数方式进行编码。
(2)产生初始种群。根据工艺机制或工程经验确定搜索空间,然后在搜索空间内均匀产生主群体、辅助群体A和辅助群体B的初始个体。
(3)计算各种群个体的适应度。依次计算主群体和辅助群体的个体适应度,并按照适应度大小排序。同时判断主群体的适应度最高的个体是否符合精度要求,如果满足则跳转步骤(10)停止搜索,否则继续进行。
(4)计算协同作用因子。根据搜索指数α(i)的变化情况,实时计算当前进化代数对应的交叉概率、变异概率和辅助群体交换概率。
(5)辅助群体均匀化。辅助群体A和B对个体进行均匀化处理。
(6)辅助群体的进化操作。对于辅助群体A、B的个体,按照自适应交叉概率 Pc-a、Pc-b和变异概率Pm-a、Pm-b进行复制、交叉、变异操作,然后对辅助群体A、B重新按照适应度大小排序。
(7)种群之间个体交换。①进行主群与辅助群体A之间的个体交换;②主群重新按适应度排序之后,与辅助群体B进行个体交换;③辅助群体A和B重新排序后,按照随机概率γ进行个体交换。
(8)主群进化操作。①主群选择父代个体:按照适应度大小,选择产生父代个体,并选择适应度最高的个体为精英个体;②主群个体交叉:参见参考文献[10,11]相关部分;③主群个体变异:参见参考文献[10,11]相关部分。
(9)形成下代种群。交叉和变异过程产生的新个体组成下一代种群,重复步骤(3)~(9)直到满足收敛条件或达到最大搜索步数为止。
(10)结束寻优搜索。
NCEA具体寻优工作流程如图2所示。
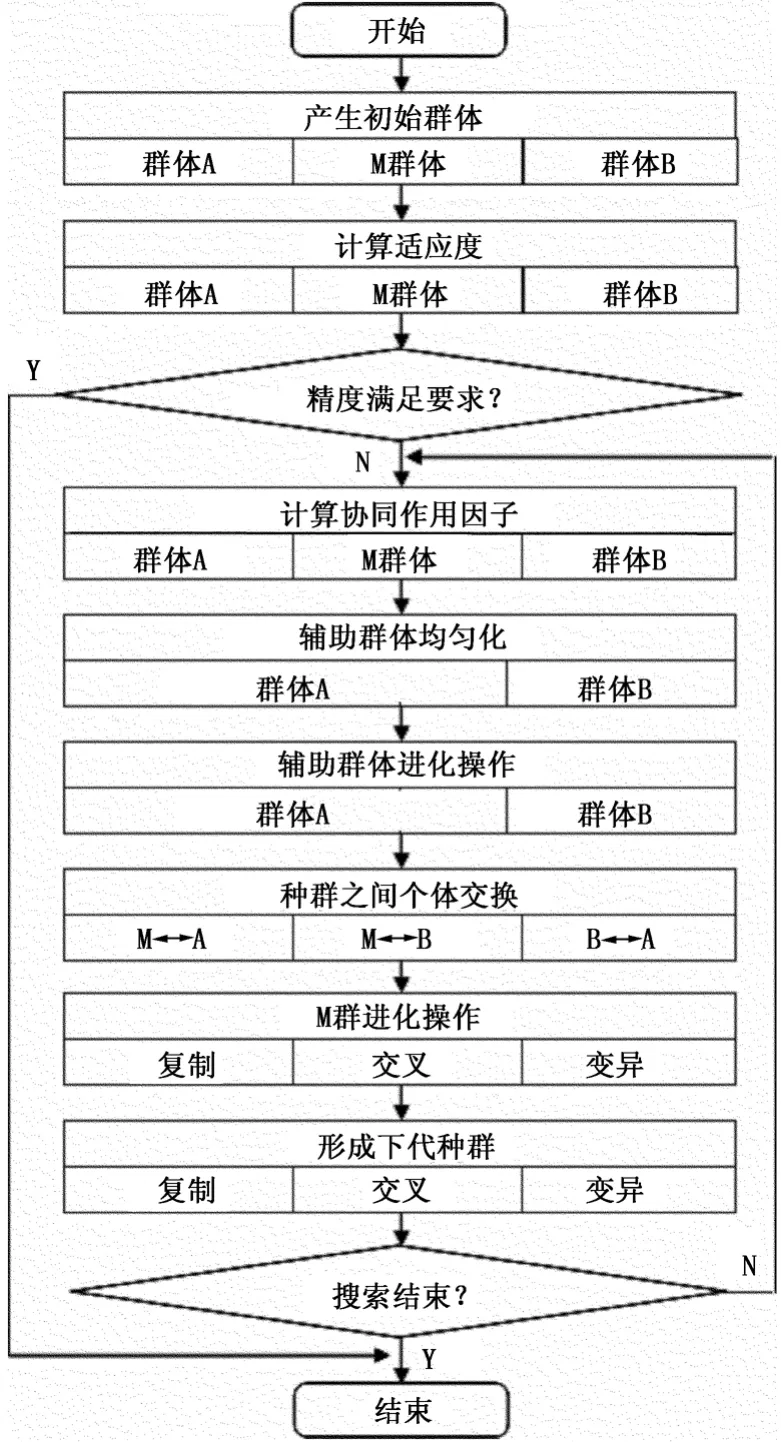
图2 NCEA寻优流程Fig.2 Searching process of NCEA
3 NCEA寻优效果
为了验证NCEA的寻优效果,选择2个典型的测试函数对该算法进行试验。本文中选择标准遗传算法(GA)、一种改进遗传算法(CGA)[10-11]和NCEA进行寻优性能比较。为排除随机因素,试验结果为通过10次仿真试验的平均值,并比较三者的收敛速度和搜索精度。

该函数变量个数为30,每个变量的取值范围为- 32≤ xi≤ 32,(i=1,…,30),其全局最大值为f(xi)max=0。因为变量个数较多,全局寻优非常困难。
在测试试验1(测试函数Ⅰ)中,标准GA种群、CGA[10-11]种群的个体数量为90,NCEA 的主群、辅助群体A和B的种群数量均为30,即其个体总量为90,采用实数方式编码,最大搜索步数为1 000。=0.9、=0.05是CGA和NCEA的初始交叉和变异概率,也是标准GA的交叉和变异概率。NCEA的其他参数设置如下:εj=0.1,ψj=5,=0.3,φ =0.2,ω%=10%,l=20。
在测试试验2(测试函数Ⅱ)中,标准GA种群、CGA[10-11]种群的个体数量为120,NCEA的主种群、辅助群体A的种群和B的种群个体总数量为120,采用实数方式编码,最大搜索步数为2000。其他参数同测试试验1。
测试函数Ⅰ和Ⅱ的极值寻优结果如表1所示。由表1可知,NCEA的寻优精度最高,其次为CGA,最后为GA。

表1 测试函数优化结果比较Table 1 Comparison of optimized result for test functions
测试函数I和II的极值寻优过程变化情况如图3所示。从图中可以看出,NCEA的寻优精度和收敛速度最好,CGA的寻优精度和收敛速度稍好于标准GA。
综上,在相同测试环境下,NCEA比标准GA和CGA具有更好的寻优搜索精度和更快的收敛速度。

图3 测试函数最优值寻优过程Fig.3 Searching process of optimized value of test function
4 应用于基于NEI调节机制的非线性智能优化控制器
选取文献[12]介绍的一种基于NEI调节机制的非线性智能优化控制器(NOIC),其非线性控制算法如下:
式中,E(t)为标准化控制偏差;e(t)为控制偏差;u(t)为实时控制器输出;Kp(t)为比例控制增益系数;α、β共同决定了控制偏差为0时的最大提呈倍数α/(1-β),且1≤α≤10,0≤β < 1.0;n为正实数;ε1和ε2为阈值[11]。因为在NOIC中有7个控制参数需要调整,手动调整参数使NOIC发挥控制性能比较困难,选用NCEA对所涉及到的控制参数进行寻优。选择一个非线性对象作为仿真试验对象,其离散化方程(Ts=0.5 s)为

在仿真试验中,所有的控制参数都在有限空间内利用NCEA进行优化。NCEA的优化种群个体总数为120,主群和辅助群的种群个体总数均为40,其最大搜索步长为1500,其他参数与测试函数试验相同。仿真实验中,将NOIC和传统PID控制算法的控制性能进行了比较。传统PID控制算法和NOIC的优化条件与NCEA相同。其控制参数搜索区间如下:Kp∈[0,15],Ki∈[0,10],Kd∈[0,5],λ ∈[1,20],α ∈[0,2],β∈[0,0.5],ε1∈[0,1.0],ε2∈[0,0.5]。g1=0.999,g2=0.001,g3=2.0,g4=100。
利用NCEA对NOIC的控制参数优化结果如下:λ =3.1062,Kp=3.9627,α =1.1058,β =0.1216,ε1=0.2164,ε2=0.0081。PID控制算法优化控制参数为:比例系数Kp=0.1392,积分增益Ki=0.1094,微分增益Kd=0.4725。控制对象(12)的优化控制效果对比情况如图4所示。

图4 优化控制效果Fig.4 Optimized control effectiveness
从图4可以看出,与传统优化PID控制算法相比,优化后的NOIC能够更快、更稳定地消除控制偏差,且具有更小的超调量。
5 结束语
基于人体生理网络双向协同调节机制,提出了一种网络协同优化算法(NCEA)。其监控管理级根据适应度和群体分布密度等信息,发送协同指令给协同调节级;协同调节级根据协同调节指令,调整各个搜索群体的交叉和变异概率因子、搜索群体之间的个体交换和辅助搜索群体的个体均匀化;调节指令能够根据目前的最优适应度变化情况,实时改变交叉和变异概率因子,以及辅助群体的个体交换概率等。综合仿真结果表明:在相同优化测试环境下,
与标准GA和CGA相比,NCEA具有比较快的收敛速度和搜索精度;优化后的NOIC具有较好的优化控制效果,进一步验证了NCEA具有较好的应用效果。
[1]丁永生,刘宝,任立红,等.基于生物网络的智能控制与优化[M].1版.北京:科学出版社,2010:25-105.
[2]KIM B Y,NAM G J,RYU H S,et al.Optimization of filling process in RTM using genetic algorithm[J].Korea-Australia Rheology Journal,2000,12(1):83-92.
[3]赵瑞艳,李树荣,张晓东.基于混合遗传算法的控制受限热传导系统最优控制问题求解[J].中国石油大学学报:自然科学版,2009,33(2):160-163.
ZHAO Rui-yan,LI Shu-rong,ZHANG Xiao-dong.Optimal control solving of heat transfer system with input constraints by applying hybrid genetic algorithm[J].Journal of China University of Petroleum(Edition of Natural Science),2009,33(2):160-163.
[4]排新颖,王子亭.带有梯度信息的遗传算法在求解非线性方程组中的应用[J].中国石油大学学报:自然科学版,2009,33(3):172-174.
PAI Xin-ying,WANG Zi-ting.Application of genetic algorithm with gradient information to solving non-linear equation group[J].Journal of China University of Petroleum(Edition of Natural Science),2009,33(3):172-174.
[5]KHALED B,FAOUZI T.Genetic algorithm for the design of a class fuzzy controller:an alternative approach[J].IEEE Trans on Fuzzy Systems,2000,8(4):398-405.
[6]FLEMING P J,PURSHOUSE R C.Evolutionary algorithms in control systems engineering:a survey[J].Control Engineering Practice,2002,10(11):1223-1241.
[7]FARHY L S.Modeling of oscillations of endocrine networks with feedback[J].Methods Enzymol,2004,384:54-81.
[8]BRAZZINI B,GHERSETICHI,HERCOGOVA J,et al.The neuro-immuno-cutaneousendocrine network:relationship between mind and skin [J].Dermatologic Therapy,2003,16:123-131.
[9]PAYNE J K.A neuroendocrine-based regulatory fatigue model[J].Biological Research for Nursing,2004,6(2):141-150.
[10]刘宝.基于生物网络的智能控制系统及其应用[D].上海:东华大学信息科学与技术学院,2006.
LIU Bao.Bio-network-based intelligent control systems and their applications[D].Shanghai:College of Information Sciences and Technology,Donghua University,2006.
[11]王君红,刘宝,袁若泉,等.一种非线性遗传算法的设计与应用[J].计算机仿真,2010(2):196-199.
WANG Jun-hong,LIU Bao,YUAN Ruo-quan,et al.Design and application for a nonlinear genetic algorithm[J].Computer Simulation,2010(2):196-199.
[12]刘宝,丁永生,王君红.基于NEI调节机制的非线性智能优化控制器[J].控制与决策,2008,23(10):1162-1165.
LIU Bao,DING Yong-sheng,WANG Jun-hong.An nonliear intellgent optimized controller based on the mechanism of NEI[J].Control and Decision,2008,23(10):1162-1165.
Collaborative evolution algorithm based on physiological bi-regulation mechanism
LIU Bao1,WANG Jun-hong1,DING Yong-sheng2,3,XIA Bo-kai1
(1.College of Information and Control Engineering in China University of Petroleum,Qingdao 266555,China;2.College of Information Sciences and Technology,Donghua University,Shanghai 201620,China;3.Engineering Research Center of Digitized Textile & Fashion Technology,Ministry of Education,Shanghai 201620,China)
In order to improve the searching effect for the optimization of multi-parameters,a networked collaborative evolution algorithm(NCEA)was presented based on the bi-regulation mechanism of physiological system.Its structure was designed according to the relative physiological system,which included supper monitor level(SML),collaborative modulation level(CML),and searching population level(SPL).The SPL sends collaborative command to CML,according to the value of individuals fitness and distribution density fed back from searching population level.According to the collaborative command,the CML adjusts the crossover and variation probability,and the individuals exchange probability and uniformity of SPL based on the change of performance index and the corresponding law of physiological modulation.SPL is composed of main searching population and supplement searching population.The supplement population can supply excellent individuals for main population to avoid the searching falling into some local peak.In the experiments,two typical nonlinear functions were firstly selected to examine the searching precision and convergence rate of NECA,and then it was applied to the optimizing process of a novel nonlinear optimization intelligent controller.The experimental results show that the NCEA has better convergence rate and searching precision than normal GA and CGA(an improved GA).
genetic algorithm;collaborative evolution;crossover;variation
TP 274
A >
10.3969/j.issn.1673-5005.2011.05.033
1673-5005(2011)05-0173-07
2011-02-28
国家自然科学基金重点项目(60534020);国家自然科学基金项目(60775052);中央高校基本科研业务费专项资金项目(09CX04026A);山东省优秀中青年科学家科研奖励基金项目(BS2010DX038);教育部博士点新教师基金项目(20070425518);中国石油大学(华东)博士科研启动基金项目(Y070502)
刘宝(1971-),男(汉族),山东淄博人,副教授,博士,主要从事生物智能计算及控制研究。
(编辑 修荣荣)
