基于 802.11b/g的井下机车无线遥控系统设计①
2010-12-26张宏涛
张宏涛
(山西晋煤集团赵庄煤业有限责任公司,山西晋城 046605)
基于 802.11b/g的井下机车无线遥控系统设计①
张宏涛②
(山西晋煤集团赵庄煤业有限责任公司,山西晋城 046605)
无轨运输是未来矿山设备的一个发展趋势,而地下铲运机 (LHD)的使用是无轨化采矿技术的一个重要组成部分。为提高矿石回采率,解决采空区残矿回收以及环境恶劣和危险作业地点的出矿问题,国外已经研究开发了井下铲运车的无线视距遥控技术,而我国发展相对落后。本文针对矿山井下铲运机遥控功能需求,研究开发了基于无线局域网 802.11b/g的井下铲运车视距、非视距遥控系统,并在此基础上可方便的集成机车状态监测、机车定位、自主导航、视频通信、语音通信等功能,对矿山井下安全高效生产具有重要意义。
矿山井下;铲运车;无线局域网;无线遥控
1 概述
随着无底柱分段崩落法[1]在金属矿山的逐步应用,对井下铲运车的遥控需求日渐突出。1980年,国际镍有限公司 ( INCO)最早在大型空场法采场中进行了首次无线电遥控铲运机试验[2]。在第二阶段中虽然继续使用简单的射频接收机,但采用可编程逻辑控制器 (PLC),以便借助基于规划的梯形图来解释和修改无线电指令。遥控系统的最新进展是用计算机系统、网络系统、现代无线通信技术、微处理器、带机载通信网络的分布式控制系统来代替可编程控制器。嵌入式软件和硬件以及现代通信体系结构支持着机车自诊断的就地执行、机车自动导航、无线语音、视频通信以及基于规则的安全系统和闭锁机制。根据需要通过增设能适应多种传感器的节点,可增加并改善机器性能的监测能力。
2 功能要求
矿山井下机车遥控系统的基本功能通过便携式遥控手柄单元实现,主要功能包括:引擎启动、前进 /后退、左转 /右转、升 /降大臂、装 /卸物料、油门控制、驻车刹车、辅助刹车、前 /后大灯控制等。其它辅助功能包括:手动到遥控和遥控到手动的引擎保持、自动灭火控制、紧急停车、快 /慢档位以及各种互锁功能。
3 系统方案
3.1 WLAN网络
WLAN是 20世纪 90年代计算机与无线通信技术相结合的产物,它使用无线信道来接入网络,为通信的移动化,个人化和多媒体应用提供了潜在的手段,并成为宽带接入的有效手段之一。802.11为 IEEE(电机电子工程师协会,The Institute of Electrical and Electronics Engineers)于1997年公告的无线区域网路标准,适用于有线站台与无线用户或无线用户之间的沟通连结。802.11系列标准工作于 2.4Ghz的自由开放 IS M波段,当前最高通信速率可达 108Mb/s,支持的使用范围是室外 300 m,办公环境中最长为 100m,物理层标准主要有 IEEE802.11b,a和 g[3-5]。
WLAN的网络结构主要有两种类型:无中心网络(Ad Hoc)和有中心网络。无中心网络也称对等网络或 Ad-hoc网络。对等网络用于一台无线工作站 (STA)和另一台或多台其他无线工作站的直接通讯,该网络无法接入有线网络中,只能独立使用。对等网络中要求所有 STA具有相同的 SS ID和密码。有中心网络也称结构化 (Infrastructure)网络。它由无线 AP、无线工作站 (STA)和无线AP之间的电缆组成。
在本设计中,铲运车遥控系统既可以工作在Ad Hoc模式下,也可以工作在有基础架构 (Infrastructure)工作模式下。当铲运车位于矿石装卸工作区域时,手柄遥控单元和车载单元距离不超过 40m,两者以Ad Hoc模式建立通信;而当铲运车在运输过程中,利用预先铺设的数字矿山无线网络[6],切换到Infrastructure模式,利用自主导航或者通过网络视频监控了解机车位置,在控制中心来遥控铲运车的长距离运输,其网络结构如图 1所示。
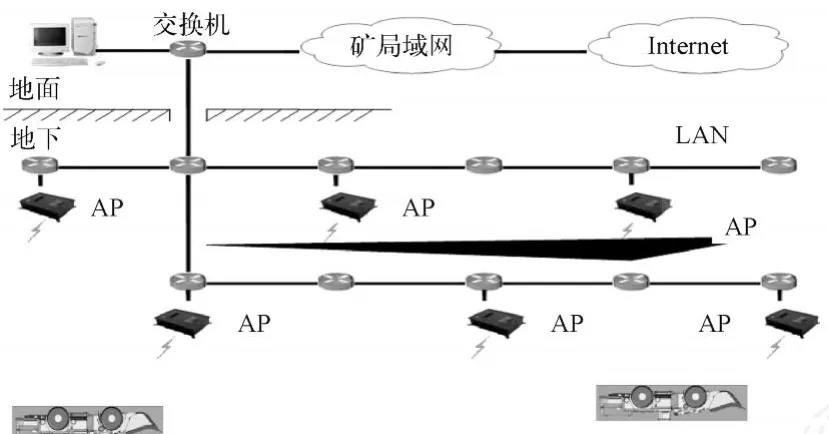
图 1 遥控系统网络系统架构
3.2 系统设计
基于 802.11b/g无线网络的铲运车遥控系统主要包括两个部分:车载单元和手柄操作单元,每个单元硬件都包括核心板和驱动底板,核心板两者相同,可以共用,而底板不同。车载单元主要功能是接收手柄单元发送的控制指令,驱动相应的电磁阀动作,完成机车相应遥控动作,比如,前进、后退等。核心板主要芯片包括 S3C2440 ARM9处理器、64MBytes Nand-Flash、64MBtyes SDRAM、WLAN无线模块WM-G-MR-09、以太网物理芯片 DM9000A等。核心板硬件设计和市场上ARM开发板基本相同,除了增加WLAN无线通信模块,无线部分电路如图 2所示。
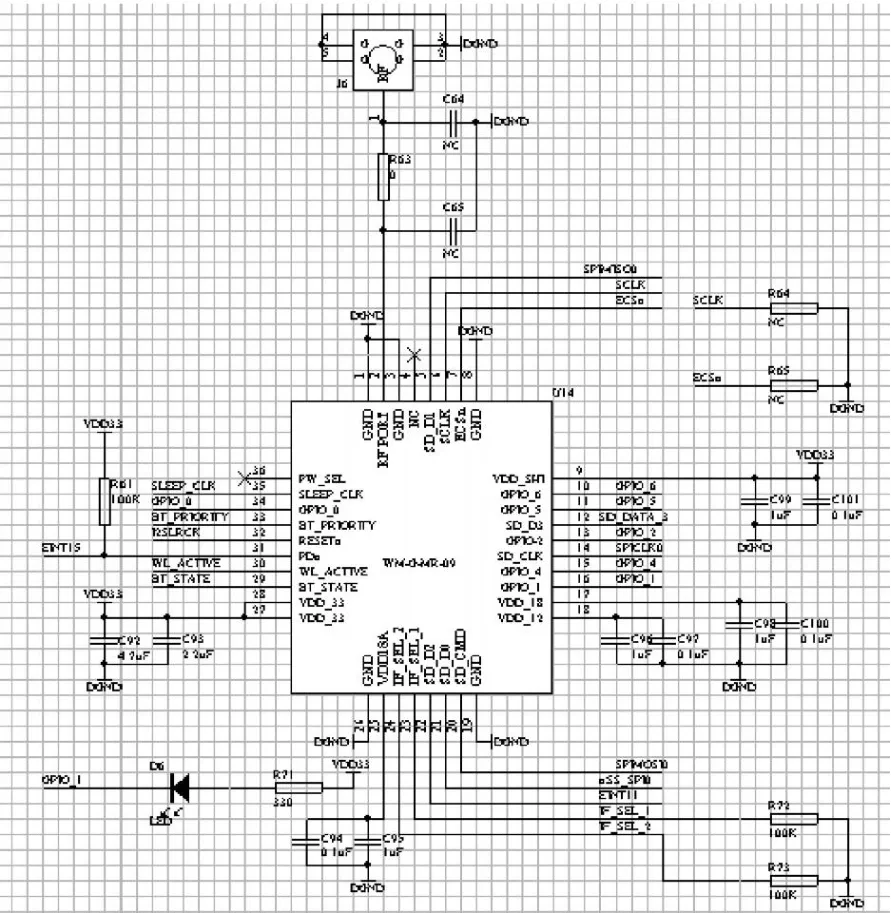
图 2 WLAN无线模块原理图
车载单元底层驱动包括 24路输出和 16路输入,其中 24路输出中包括 8路 PWM输出,分别用于控制前进 /后退、左转 /右转、升 /降大臂、装 /卸物料功能相对应的比例电磁阀,其它 16路 IO输出可根据不同型号机车,分别去控制驻车刹车、辅助刹车、半油门、全油门、快 /慢档位、灭火开关等,且输出驱动能力为 24V,2.2A以上。其输出、输入电路如图 3和 4所示。
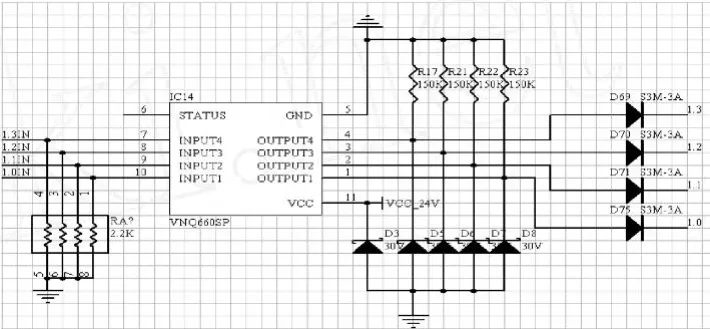
图 3 输入电路原理图
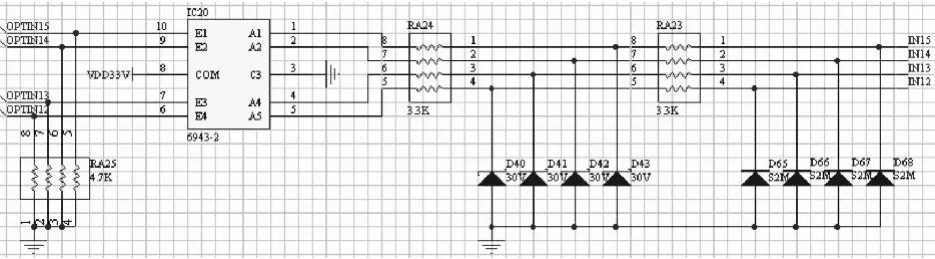
图 4 输出电路原理图
手柄控制单元主要功能是根据现场实际情况和工作需要,将左右遥控手柄幅度信号转换成电压信号,经 AD转换后和面板上各摇头开关状态一起封装成 TCP/IP包,通过WLAN无线网络发射到机车单元。因此,手柄单元电路设计主要包括AD转换、按键状态采集、WLAN无线网络模块等。
3.3 软件系统设计
在本系统设计中的车载单元和手柄单元,由车载单元作为服务器,负责对通信链路进行监督和管理。系统上电后,车载单元首先搜索附近是否有符合默认 SS ID的 AP,如果有则连接到符合要求的 AP上,否则,车载单元建立 Ad Hoc结点,且 SS ID为默认值。在手柄操作单元系统上电启动后,同样首先搜索默认 SS ID值的 AP,如果有则进行连接。此时,手柄单元和车载单元则以 Infrastructure模式建立了通信链路,并进行遥控操作;如果手柄单元没有发现符合要求的 AP存在,则以 Ad Hoc模式搜寻存在的 Ad Hoc结点 (车载单元),发现后建立连接,从而以 Ad Hoc方式建立通信。在正常情况下,必然存在有符合要求的 AP设备或者车载单元自身建立的Ad Hoc结点。
在本系统软件设计中,主要包括以下功能:
1)基本功能:前进 /后退、左转 /右转、升臂 /降臂、装料 /卸料、油门控制、驻车刹车、辅助刹车、前灯 /后灯、启动 /熄火等;
2)安全功能:为了保证遥控系统安全,增加了紧急停车按钮:任何情况下按下紧急停车按钮,机车熄火、空档、驻车刹车和辅助刹车施加;手柄单元倾斜保护:当手柄单元向任何方向倾斜时,都会导致类似紧急停车按钮按下保护动作,即机车熄火、空档、驻车刹车和辅助刹车施加,从而防止操作人员由于摔倒导致机车的误动作。
2)互锁功能:本系统设计的互锁功能包括:
(1)引擎启动互锁
只有驻车刹车已经施加时,机车引擎启动功能才能起作用。
(2)延迟关机互锁
只有驻车刹车已经施加时,延迟熄火开关才能起作用。当延迟熄火开关被释放后,操作者有3秒的时间来切断手柄控制单元电源。当手柄控制单元在此时间范围内关机,机车引擎将保持运转 60秒。如果在 3秒后,手柄控制单元仍然开机,延迟熄火的请求将无效。如果在延迟熄火请求被放弃后,关闭手柄控制单元电源,铲运车将立即熄火,如同紧急停车按钮按下。
(3)无人值守机车计时器
当延迟熄火开关动作后,操作者有 60秒的时间来停靠铲运车,并将模式切换旋钮由遥控模式切换到手动模式。机车引擎将保持“运行”状态输出,当 60秒的时间结束,铲运车将熄火。
(4)无人值守遥控计时器
当模式切换旋钮由手动模式切换到遥控模式。机车引擎将继续运行。此时,操作者将有 60秒的时间来打开手柄控制单元并建立通信链路。如果在 60秒时间内,通信链路无法建立,引擎将会熄灭。在此之后,仍然可以建立控制链路,但是需要从新启动铲运车的引擎。
(5)无人值守遥控待机计时器
当无线通信链路突然断开时,机车单元将保持在“激活”状态,并尝试在 90秒内从新建立控制链路。在 90秒之后,机车单元将进入“休眠”状态。打开手柄控制单元电源将从新使机车接收单元进入“激活”状态。
(6)前进 /后退 -驻车刹车互锁
只有当驻车刹车释放后,铲运车才能前进或者后退。
(7)空挡 -辅助刹车互锁
只有当机车的传动系统被操作为前进或者后退时,铲运车的辅助刹车才会释放。当前进或者后退方向操作手柄归于中位时,在 0.5秒时间后辅助刹车将会自动施加。
(8)手动模式到遥控模式互锁
当操作者准备利用遥控模式操作铲运车时,他必须首先将机车的驻车刹车施加到正确位置,并将传动系统放到空挡。如果操作者没有遵守这些操作规程,铲运车将自动熄火。操作者将不能继续用遥控模式操作,直到错误的条件被清除掉。
4 系统测试
为了测试系统的可靠性和有效性,我们在北京安期生技术有限公司生产的ACY一 2A型地下内燃铲运机上进行了系统测试。该车型主要用于金属矿山井下,以铲装、运输爆破后的松散物料为主。该设计方案为手控和遥控并用,在危险作业区域外由操作人员手控驾驶,进入危险作业面时改为遥控操作,完成整个铲装作业循环,驶出危险作业面后再改为手控,由驾驶员操纵完成卸载。
在测试中我们分别验证了 Ad Hoc工作模式和 Infrastructure工作模式,在每种模式中我们针对每种功能都进行了详细测试,系统控制实时性强、通信及控制可靠,能很好的完成铲运车的各种功能,并具有更加严格的安全保护程序来保障遥控铲运车的安全运行。
5 功能扩展
该遥控系统基于 802.11b/g通信技术实现了矿用铲运车的无线遥控功能,同时可以方便的扩展其它所需功能。
1)机车状态监测:机车控制单元预留 CAN总线接口和 RS232接口,利用安装在铲运车上的各种状态监测传感器;
2)机车定位:在生产实践中,及时了解机车位置对生产调度具有重要意义。基于 802.11b/g无线网络接收信号强度、井下电磁波传播模型以及无线定位算法,可以精确定位出机车实时位置[7]。
3)自主导航:井下铲运车在装卸时需要遥控操作,而在装、卸之后行驶过程中既可以利用前后视频进行遥控,也可以实现机车的自主行驶和导航。
4)无线语音和视频通信:利用 VO IP技术、SIP通信协议,我们可以实现控制台和机车现场的语音通信;同时,通过在机车前后安装无线网络摄像机,我们可以在监控中心实时获得机车现场画面,便于更加精确的遥控和安全操作。
6 结论
矿用井下机车遥控系统的研发和使用将大大减少井下工人的劳动强度,提高工作安全防护程度,而基于遥控系统功能的扩展将是该功能的进一步延伸和增强,并最终为实现金属矿山、煤矿井下的工作面无人作业提供坚实的技术基础。
[1]柳小波,于江,等 .无底柱分段崩落法放矿方式计算机模拟研究 [J].矿业研究与开发,2004(5):18-20
[2]D.汤姆森,V.艾特肯 .遥控技术已臻成熟[J].国外金属矿山,1999(2):29-34
[3]韩旭东 .IEEE802.11无线局域网 (WLAN)研究及发展报告,赛迪网
[4]ANS/IEEE Std 802.11,1999 Edition(Reaff 2003)Part 11:W ireless LAN Medium Access Control (MAC) and Physical Layer(PHY)Specifications
[5]刘乃安 .无限局域网 (WLAN)-原理、技术与应用 [M].西安电子科技大学出版社,西安:2004
[6]田洪现,杨维,杨公训 .数字矿山综合无线局域网络研究 [J].辽宁工程技术大学学报,2006(5)
[7]田洪现,杨维 .基于无线局域网的矿山井下定位技术研究[J].煤炭科学技术,2008(5)
Design of Radio Remote Control System for Underground LHD Based on 802.11b/g
ZHANG Hongtao
(ZhaozhuangMining Co.,Ltd,JinchengAnthraciteMining Group in Shanxi Province,Jincheng Shanxi 046605)
Trackless transport is the future developing tendency in the mining transportation.However,the application of underground Load HaulDump(LHD)is one of the most important parts of the trackless transport technology.For raising percentage recovery of ores,settling up the remnantore recla im in gob area and ore removal requirements at dangerous and poorworking environment,the Radio Remote Control(RRC)technology in line of sight is researched and developed in abroad with the far front before our country.Aimed at the requirements on RRC system for underground LHD,RRC system in line of sight and none line of sight is developed based on 802.11b/g ofW irelessLocalAreaNet(WLAN).Furthermore,engine statusmonitoring,locomotive tracking and guiding,wireless video and audio,etc can be integrated in RRC system convenientlywith farmore meaningful for improving safety production and productive efficiency.
Mine Underground;W irelessLocating;WLAN;Radio Remote Control
TN915.02
A
1672-7169(2010)04-0074-04
2010-08-25
张宏涛(1974—),男,大学毕业,现在晋煤集团赵庄煤业基建管理中心机电室工作。
