“人在回路”的载人航天器控制系统地面验证平台设计
2010-12-11李志宇
任 焜,李 彬,李志宇
(北京控制工程研究所,北京 100190)
“人在回路”的载人航天器控制系统地面验证平台设计
任 焜,李 彬,李志宇
(北京控制工程研究所,北京 100190)
针对载人航天器“人在回路”的特点,在评价现有人控交会对接试验系统特点的基础上对地面验证系统设计原则进行归纳,提出一种载人航天器人工控制系统地面验证平台设计方案.该方案在继承以往航天器自动控制系统地面测试系统设计要点的基础上将“人”纳入控制闭环中,确保了载人航天器人工控制系统地面验证真实性.最后对平台的信息流回路、光学变换器等关键技术进行了阐述.
人工控制;交会对接;模拟座舱;视景;光学变换器
中国是世界上第3个成功发射载人航天器的国家.与非载人航天器相比,载人航天器除配备自动控制系统外一般还配备了人工控制系统(以下称人控系统),可由人参与完成对航天器的控制,其典型应用为人控交会对接,即航天员在航天器上对航天器的轨道和姿态进行观测,并实施人工控制,完成两航天器的交会对接[1].
由于人控系统中人处在控制闭环回路中,其地面验证试验需将人与设备共同纳入控制回路,因此与自动控制系统的地面测试系统相比需考虑更多环节.以往航天器自动控制系统的地面测试平台设计方案研究较深入,已积累了较丰富的地面激励源设计、信息流设计等经验,但对人控系统地面验证平台的设计方案研究不多.
本文以人控交会对接为背景,提出了“人在回路”[2]的载人航天器控制系统地面验证平台设计方法.
1 人控系统地面验证平台设计原则
1.1现有平台特点分析
目前可用于人控交会对接的地面验证系统主要有两种形式,分别为交会对接半物理仿真运动模拟器、基于虚拟现实技术的交会对接人机控制仿真系统.
交会对接半物理仿真运动模拟器利用转台等设备实现对追踪器和目标器的空间转动和平动的模拟,一般通过简化将两航天器的12自由度运动简化为9自由度运动.美国、欧洲、日本等均建立了此类运动模拟器用于地面验证交会对接技术,如图1所示[3].该运动模拟器可同时用于自动控制系统和人控系统的交会对接方案验证,但存在一定局限,主要体现为:
1)在试验距离、试验转角等方面受试验场地、设备限制较大;
2)受室内背景限制,难以提供模拟太空环境的背景.
受上述条件限制,该系统一般仅用于人控交会对接方案验证及典型工况下的交会对接系统验证,难以达到工程研制阶段测试覆盖性要求.
交会对接人机控制仿真系统是利用虚拟现实技术建立的人控交会对接试验系统,如图2所示[4].它通过计算机软件将交会对接场景进行动态显示,为操作者提供了真实的对接图像.操作者通过控制手柄向主控机的动力学模型施加激励,由主控机产生动力学数据及航天器模拟显示数据,并驱动相应的计算机生成图像和模拟显示参数.该仿真系统完全基于PC机和仿真软件开发,缺乏对实际载人航天器信息流、敏感器的模拟,适于进行人控交会对接技术原理性研究及初步人机功效设计研究,但与实际工程验证要求存在差距.
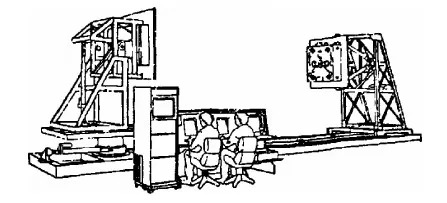
图1 交会对接运动模拟器示意图

图2 交会对接人机控制仿真系统
1.2平台设计原则
为满足载人航天器工程研制阶段的地面验证需求,达到对人控系统性能进行全面验证的目的,需按照人控系统特点研制地面试验平台,满足以下设计原则:
1)平台应接入航天器真实设备.作为载人航天器工程研制阶段的地面验证平台,其主要功能之一为验证真实设备在系统中的功能、性能是否满足要求,因此需按照航天器实际状态将真实设备接入平台,并且要求平台具备对单机设备进行系统级验证的能力.
2)平台需具备真实的人机界面.人作为人控系统的主体,其状态对系统试验的结果影响较大,而人的发挥与环境、自身熟练程度等因素关系密切.为保证试验有效性,需确保人能够按照在轨实际状态进入控制回路,因此需提供一套接近真实的人机界面,排除不真实环境对人的影响.
3)平台应具备与航天器在轨状态一致的信息流.为验证航天器设备间的匹配性能及分系统整体性能,需设计与航天器一致的系统信息流体系,保证设备间硬件接口、协议、时延等与真实航天器一致.同时,要求人、机信息链路,包括供人观察使用的图像信息和数据信息等也保持与真实在轨环境一致.
4)利用仿真运动代替真实物理运动.航天器工程研制阶段的工作重点转为技术实现可靠性及设备间匹配性等方面.为确保测试覆盖性,要求测试平台能够设置人控系统的全部任务工况(含正常、边界和故障工况).半物理仿真运动模拟器无法满足上述要求,而采用虚拟现实技术建立的仿真运动环境不受上述工况设置限制,能够满足测试覆盖性要求.并且,仿真运动环境具有使用效率高、试验开销小等优势.
2 人控系统地面验证平台设计方案
按照上述设计原则,提出图3所示的载人航天器人控系统地面验证平台设计方案.系统主要由3部分组成,分别为模拟座舱、视景仿真系统和地面综合闭环测试系统.
模拟座舱参照载人航天器状态设计,为实施人工控制提供接近真实载人航天器环境的人机操作界面.舱内设置仪表面板、控制手柄等载人航天器真实设备,同时配备了模拟舷窗、模拟操作座椅及其他试验辅助装置.设备间相对位置关系也与真实航天器状态一致.
视景仿真系统利用虚拟现实技术设计,它实时接收动力学数据,并驱动视景仿真软件生成模拟太空图像、交会对接模拟目标图像以及模拟地球图像,同时根据在轨环境下各种图像的视线角特点设计相应的光学变换器,将各种图像通过光学变换器变换为接近真实的模拟太空图像,供人眼或人控系统专用设备观察、采集.
地面综合闭环系统参照星/船自动控制系统的地面试验系统[5]设计,系统包含动力学仿真计算机、各种敏感器激励源以及各种外系统的等效模拟器,具备完整的控制系统测试功能和完整的信息流体系.该系统能够实现系统级仿真模拟,确保对人控系统设备及系统功能的测试有效性.
试验时地面综合闭环测试系统进行动力学仿真计算,并同时驱动各种敏感器、模拟器及视景仿真系统,视景仿真系统生成各种模拟图像后按相应通道送出,并最终显示在舱内仪表面板,操作者根据各种模拟图像及状态参数判断航天器姿态和位置,并操纵控制手柄以及仪表面板对航天器实施控制,系统控制器接收各种敏感器信号以及操作者的控制指令,进行计算并输出执行机构控制指令及各种状态参数.

图3 人控系统地面验证平台组成框图
3 人控系统地面验证平台关键技术
3.1基于“人”的信息体系
以往星/船自动控制系统地面测试平台对象为控制系统产品,信息链路设计主要针对信号接口、软件协议等开展,设计方法相对成熟.载人航天器人控系统地面验证平台在继承了上述信息链路设计特点的同时还需将“人”引入控制回路,构建以人为中心的信息体系.系统具有以下难点:
1)人机界面复现程度要求高.在自动控制系统地面测试中,对接地、电磁兼容、隔离等测试环境进行综合设计,不需对设备布局、安装状态等严格要求,而人控系统地面测试为保证人以真实状态参与闭环控制,对人机界面提出了较高要求,对设备布局、操作方式、信号特征等均要求与真实航天器保持一致.
2)信号模拟方式要求多样.在自动控制系统测试中,信号形式主要有光、电、电磁波等.而人控系统除上述信号形式外,还需为人和航天器设备输出图像信号,真实获得太空图像的难度很大,需借助虚拟现实技术.随着计算机技术的发展,利用计算机视景模拟太空图像的技术已日益成熟.图4是视景仿真系统的组成框图.图中4台高性能计算机中3台分别作为舷窗、对地观测以及交会对接的视景图像生成设备,剩下1台作为3台计算机的调度计算机,用于实现对3台计算机的远程软件设置、加断电操作及数据保存等.各计算机通过网络接收动力学数据生成图像并传送至相应的显示通道.

图4 视景仿真系统框图
3.2光学变换器
人控系统交会对接观测设备和对地观测设备等专用设备的输入信号均为可见光图像,为在系统闭环回路中引入上述设备,模拟激励源需满足以下要求:
1)激励源为闭环动态图像信号;
2)激励源光学特性满足航天器设备光学系统要求.
光学变换器接收视景生成计算机的数字图像,经光学系统变换为航天器设备所需的光学图像,如图5所示.航天器设备与光学变换器通过精确装调安装成一体,保证模拟器光学系统与航天器设备光学系统对接.
上述光学变换器还具有如下优点:
1)光强控制能力强.太空环境由于缺少空气、尘埃等反射作用,光强变化范围巨大,因此航天器设备的背景光调节(以下称调光)能力是地面需进行重点验证的项目.而在实物成像试验中,由于缺乏手段模拟极端宇宙背景光强变化,因此难以对设备的调光能力进行全面验证.而模拟器光路与设备光路完全对接,作用距离短,背景封闭,从而容易实现对进入设备的光强的调节,到达验证设备调光能力的要求;
2)试验场地要求低.以交会对接成像设备为例,若采用实物成像,则要求试验场地长度至少上百米才可完成设备的测量范围检查.与实物成像相比,利用光学变换器光路将图像变换为虚像,依靠虚拟手段控制设备的成像距离,就能使普通试验室环境下的动态成像测试成为可能.
4 结 论
本文针对“人在回路”的载人航天器人工控制系统特点,总结了工程研制阶段人控系统地面验证平台设计原则,提出了具有针对性的地面验证系统设计方案,该方案在继承以往航天器自动控制系统地面试验系统设计要点的基础上将“人”纳入控制闭环中,确保了人控系统地面验证的真实性,能够对载人航天器人工控制系统的工程研制起到重要作用.
[1] 蒋自成.基于虚拟现实的航天器手控交会技术研究[D].长沙:国防科学技术大学,2008
[2] Wigbert F.Automated rendezous and docking of spacecraft[M].Cambridge:Cambridge University,2003
[3] 张新邦,刘良栋,刘慎钊.航天器交会仿真试验的运动模拟器[J].空间控制技术与应用,2009,35(2):51-55
[4] 曲战胜,王春慧.交会对接人机控制仿真系统的研究[J].测控技术,2006,25(增刊):403-405
[5] 屠善澄.卫星姿态动力学与控制[M].北京:中国宇航出版社,1998
“Man-in-the-Loop”DesignofVerificationPlatformfortheMannedSpacecraftControlSystem
REN Kun,LI Bin,LI Zhiyu
(BeijingInstituteofControlEngineering,Beijing100190,China)
The existing test systems for manual-control rendezvous and docking technique are reviewed.Based on the characteristics of man-in-the-loop for a manned spacecraft,the design principle of ground verification system is thoroughly studied.As a result,a general design scheme is established.In this design,the essential elements of the conventional ground verification system for spacecraft autocontrol systems are kept,and man is included in the control loop as well.Finally key techniques such as man-based data link,optical converter and so on are described.
manual-control;rendezvous and docking;simulation cabin;virtual vision;optical converter
2010-06-12
任焜(1978—),男,贵州人,工程师,研究方向为控制系统总体设计(e-mail:rengreat@sina.com).
V448
A
1674-1579(2010)04-0050-04