基于小行星地形特征库的自主测距与定姿方法
2010-11-26李潇胡维多
李潇 胡维多
(中国空间技术研究院,北京100094)(北京航空航天大学宇航学院,北京100191)
1 引言
小行星探测将是人类未来深空探测最复杂的任务之一。光学导航就是利用航天器自身的光学传感器设备探测目标小行星,然后规划和处理探测到的目标天体传感器数据,结合其他星载设备获得的数据,确定航天器相对目标小行星的相对位置和姿态信息。国内外学者很早就开展了关于软着陆小行星的导航算法研究。目前结合图像处理的导航技术发展较为成熟的一种方案是:利用机载导航相机对小行星表面拍照,从图像中提取出可视自然特征点,精确地跟踪这些特征点,用激光测距仪测量探测器到特征点的距离,并利用EKF滤波处理特征点图像和距离信息,从而确定探测器与目标天体之间的相对位置与姿态。文献[1]基于特征点检测的GNC方法,给出了探测器软着陆小行星表面的导航算法。文献[2-3]以日本的MUSES_C计划为背景,详细介绍了探测器逼近并着陆小行星的指令控制方案。文献[4]则根据图像序列匹配得到的特征点对,给出了由本质矩阵求取空间探测器的运动比例参数,实现软着陆过程的导航。
上述文献都是在假定特征点跟踪不受小行星自转影响下展开研究,但是为了确保安全性,尽管探测器在实际着陆小行星表面的过程中下降速度不会很大(如“隼鸟”号探测器的最终下降速度仅为0.1m/s)[2],而考虑到小行星一般自转周期较小[5],即小行星自转很快(如Eros小行星的自转周期仅有5.27h),因此CCD相机有时很难跟踪拍摄得到小行星表面地形特征点,从而也就不能得到特征点精确的位置信息。本文为了解决特征点跟踪受小行星自转因素的影响,特征点溢出相机视野的问题,提出了一种新的方案。首先建立全景着陆地区地形特征图像数据库,图像数据库中包含了地表特征点的经纬度信息、图像纹理信息以及各特征点之间的位置相关性;然后针对CCD实拍得到的特征点在数据库中进行匹配;最后结合匹配点的位置信息,通过计算机视觉原理测量获取探测器和小行星之间的相对位置和相对姿态信息。
2 图像特征库的建立
2.1 特征点提取
从机载导航相机拍摄得到的目标小行星表面地形特征图像中获取可视自然特征点是后续推演导航算法的关键前提。本文采用了图像处理技术领域一种较为成熟的特征点采集算法——Forstner算子。在一幅灰度图像中,类似于边缘、角点、纹理等都可以被认为是该幅图像的特征信息,而对于一幅小行星地表特征图像来说,最容易被提取的特征莫过于陨石坑、大石块之类的自然特征点,这是由于它们一般实际尺寸较大,形状较为规则且亮度变化大更易于从地形背景中分割出来。因此,基于上述考虑本文选取的图像特征信息就是小行星表面的自然特征点。具体的数据库建立步骤如下:
1)利用Forstner算子提取特征区域(这里不详细阐述提取步骤,可参考文献[6])。
2)计算该特征区域的7个不变中心距[6]。选择中心距作为数据库特征之一的理由是:不变中心距具有平移、比例和旋转不变性,针对后续图像匹配时可以很好的克服由于CCD相机的平移、旋转以及图像比例变化带来的误差影响,有效提高匹配精度。
3)统计各个特征区域中心点的经纬度信息。由于小行星的立体图是可以得到的[5],根据立体图和经度、纬度可推断在任意点的半径,从而得到特征点间的距离。因此,针对每个特征区域计算距离其最近的两个特征区域的欧氏距离,将这三个特征区域构成一封闭三角形,一同存入数据库。
图1为着陆地区全景地形图,图2为所有特征区域(用白框表示)。图3为利用Forstner算子提取得到的特征区域中心点,所有原图均取自NASA的NEAR计划。
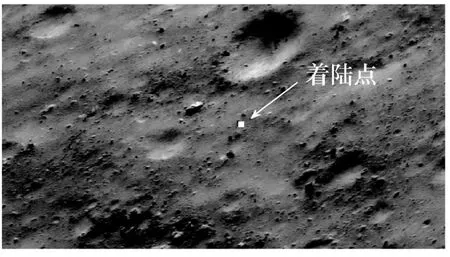
图1 着陆地区表面地形原图
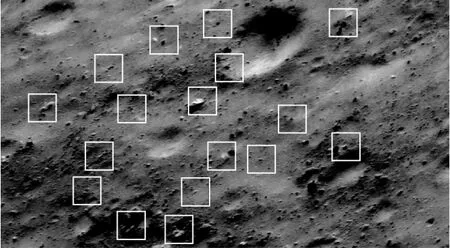
图2 特征区域图像(白框)
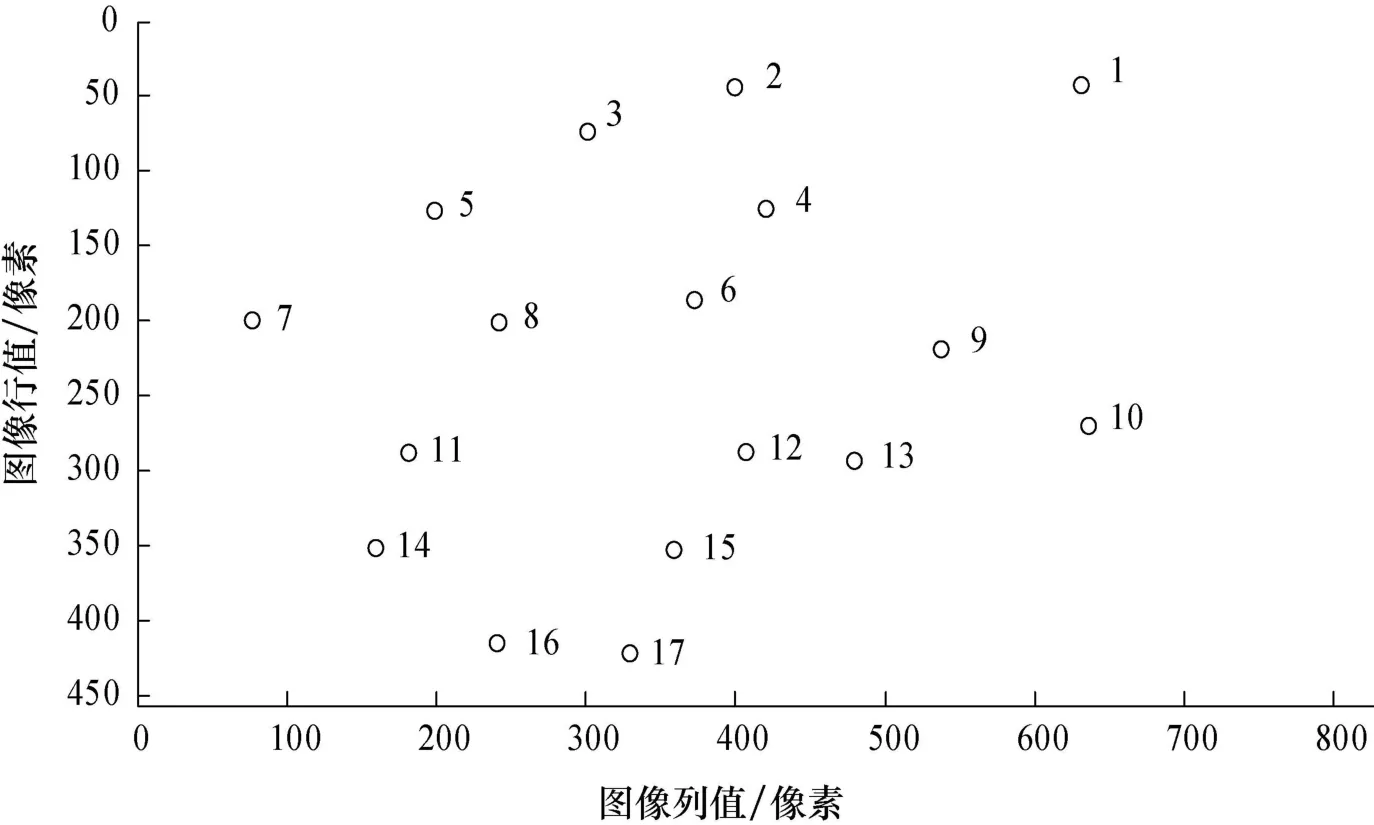
图3 特征区域中心点(圆圈显示)
2.2 建立特征库
建立特征库所要保存的信息如下:1)特征区域中心点的经纬度;2)特征区域图像的不变中心距;3)特征区域之间的位置相关性;4)特征区域在图像中的行、列位置;5)特征区域的编号(编号排列顺序依照图3中的标记)。表1为所建立的特征区域位置信息,取着陆区域的经纬度范围:经度120°~210°和纬度-20°~-40°。表2为特征区域的7个不变中心距信息(其中 φ7只有比例和平移不变性)。表3为特征区域位置相关性信息,该表包含了距离每个特征区域最近和次近的两点信息,每个特征区域的跨度为1km。
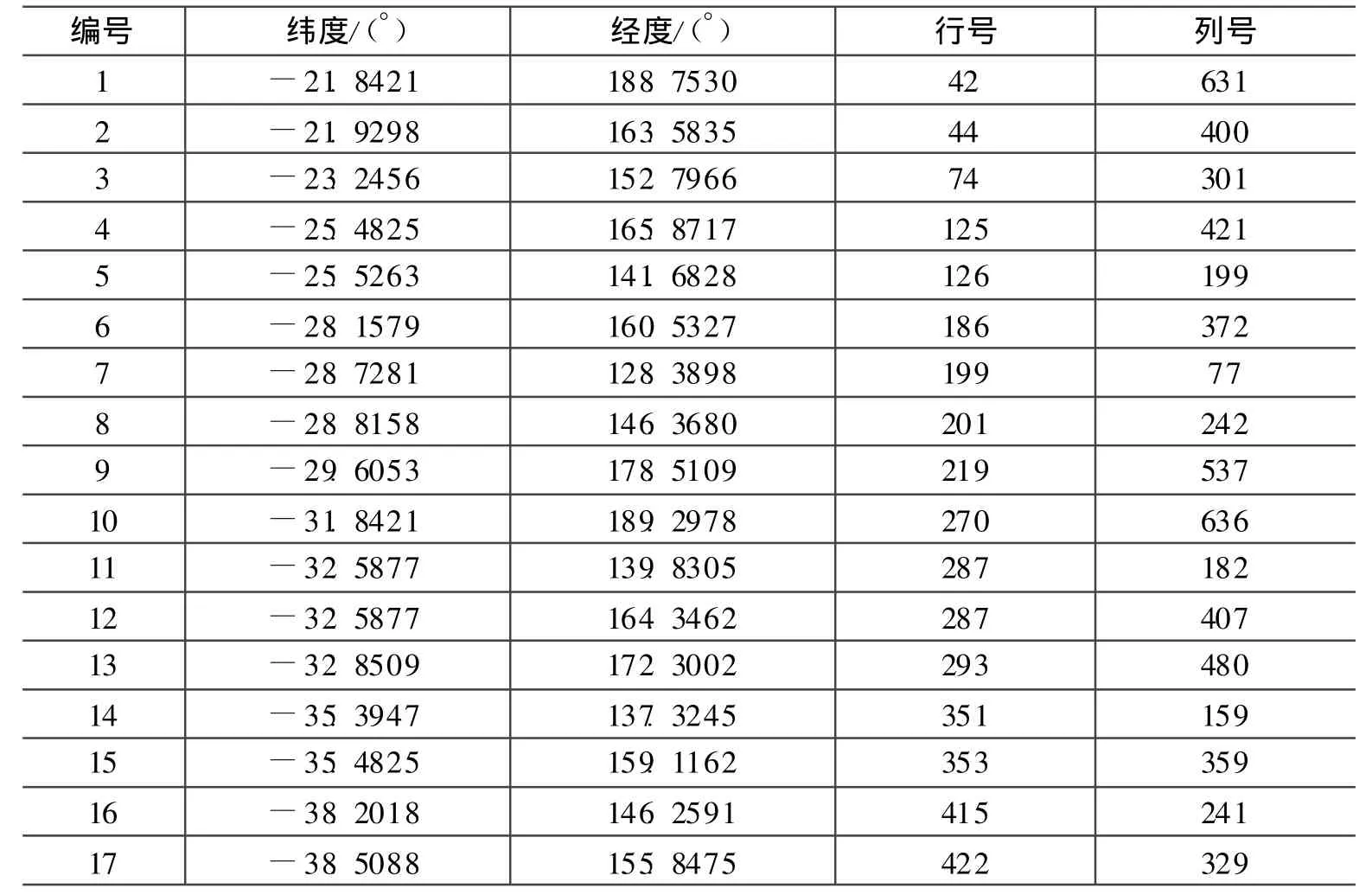
表1 特征区域位置信息
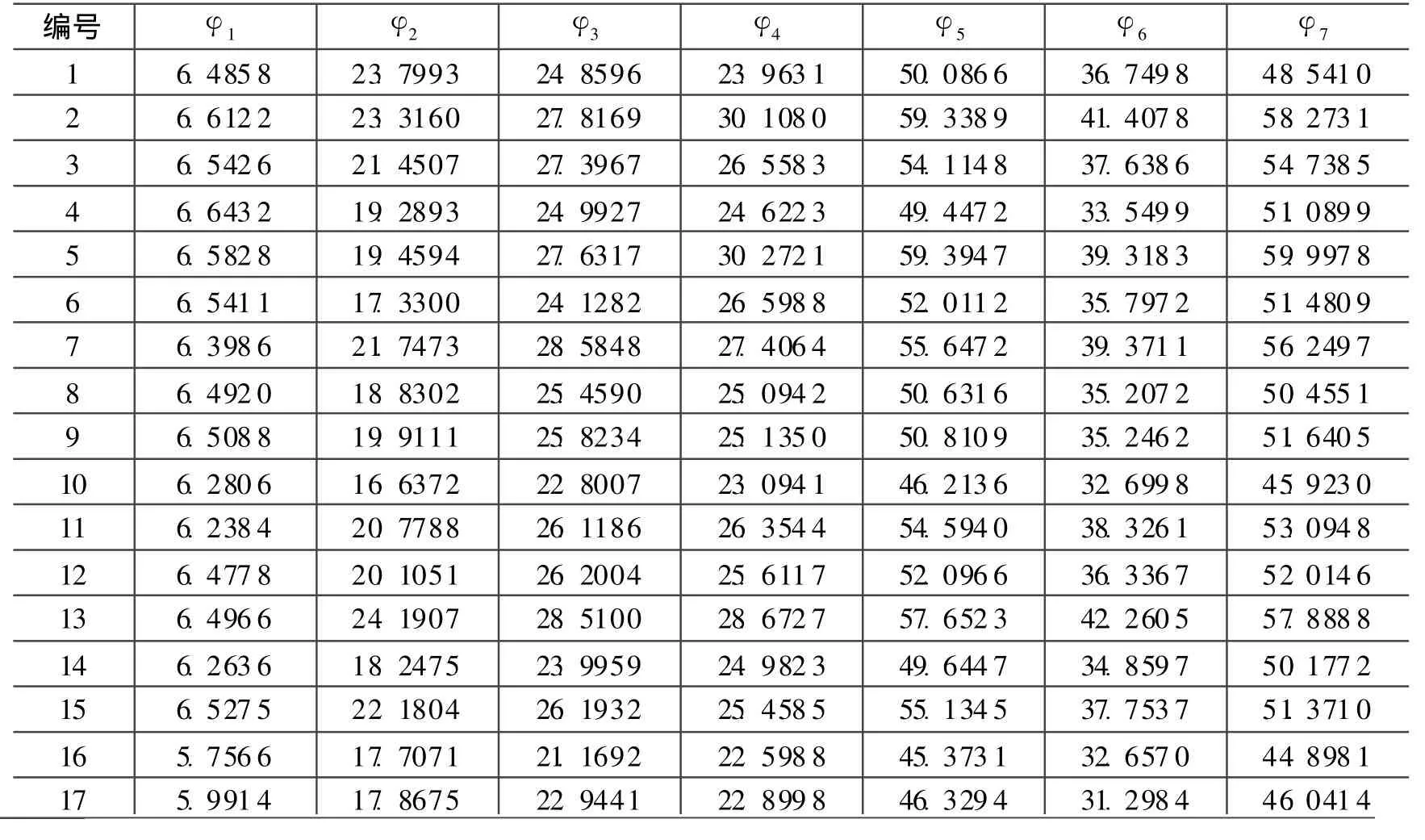
表2 特征区域不变中心距信息
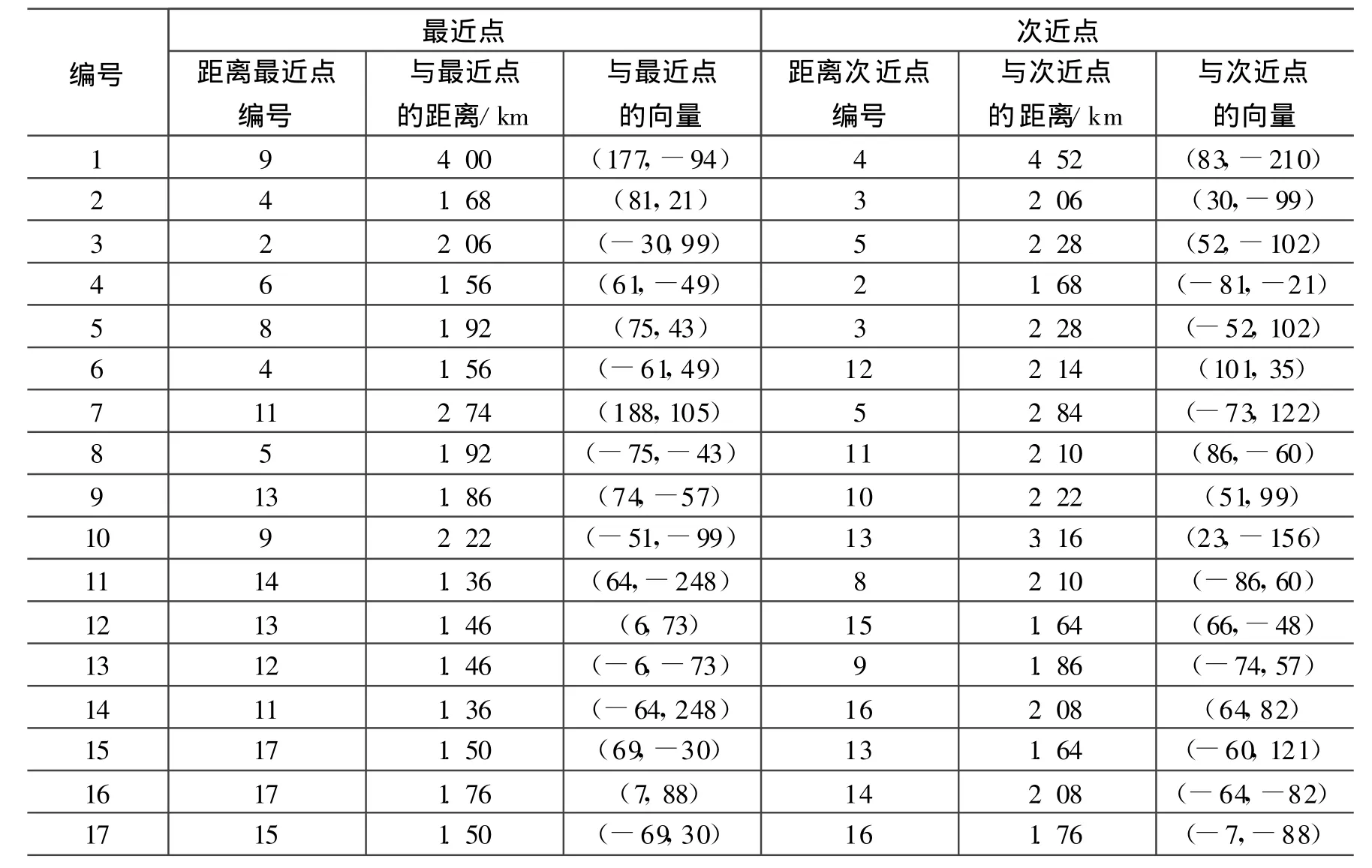
表3 特征区域位置相关性信息
3 特征区域匹配
探测器下降过程中,CCD相机拍摄着陆区域图像,由于小行星自转速率快,而探测器自身下降速度较小,因此,在前一时刻拍摄的图像中提取得到的特征点在下一时刻不能完全保证还出现在相机视野中,即发生了特征点溢出相机视野的现象,这样就不能精确跟踪得到特征点。为解决这个问题,本文在上文中建立了着陆区域全景特征数据库,在探测器下降过程中,用相同的特征点提取方法提取特征点,计算这些提取得到的特征区域的不变中心距、特征区域之间位置相关性等信息,然后在数据库里查找进行匹配得到这些特征区域的精确位置信息。具体的步骤如下:
1)同样采用Forstner算子提取下降过程中图像中的特征区域。
2)建立一个特征信息向量v=(v1,v2,v3,v4,v5,v6),这六个向量分量由特征区域的前6个不变中心距组成(去掉φ7是因为考虑到φ7只有比例和平移不变性,不具有旋转不变性,若代入计算后会有较大误差)。同样将数据库中每个特征区域的前6个不变中心距也构成一特征向量v′=(v1,v2,v3,v4,v5,v6)
3)计算这两个向量差的2-范数,即‖v′-v‖2,若值小于预先设定的阈值,则可判断为可能匹配正确,将这特征区域标定为候选特征区域。
4)基于最大互信息配准方法计算数据库中特征区域和对应的候选特征区域之间的互信息。用A表示数据库中特征区域图像,B表示候选特征区域图像,则图像A,B之间的互信息可表示为
Ⅰ(A,B)=H(A)+H(B)-H(A,B)
其中H(A)为 A的信息熵,H(B)为B的信息熵,H(A,B)为 A,B的联合信息熵。当Ⅰ(A,B)达到最大时,可判定匹配正确。图4~6展示了匹配过程和结果。
图4 下降过程拍摄原图
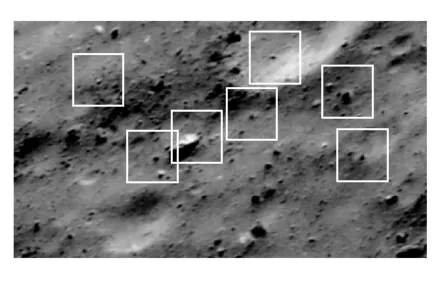
图5 特征区域(白框)
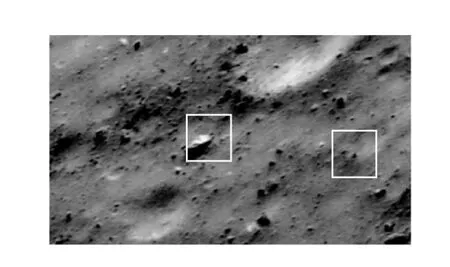
图6 正确匹配得到的结果(白框)
4 光学测距与定姿算法
本文引入计算机视觉成像原理,通过三维景物和二维图像的转换关系来获得空间三维自然特征点在探测器本体坐标系下的位置矢量。首先建立坐标系:1)探测器本体坐标系Ot-xyz:该坐标系原点位于探测器质心,z轴指向目标小行星。2)导航相机坐标系Oc-xyz:该坐标系原点位于相机光心,z轴沿着光轴方向指向目标小行星。3)着陆点坐标系Of-xyz:该坐标系原点位于着陆点,x轴指向正东,y轴指向正北,z轴指向当地水平面法向方向。4)图像物理坐标系Oi-xyz:该坐标系原点位于摄像机光轴和图像平面的交点。根据计算机视觉成像测量原理:在Oc-xyz系下像点p(x,y)与空间物点p(x,y,z)的几何关系如下(相机焦距为f)

将式(1)用矩阵形式表示为

本文采用以下的测距与定姿算法[7]:
设定Pi,Pj是Of-xyz系中的两个特征点,其在相机成像平面上的像点为 pi,pj,其在Oc-xyz系下的对应点为P′i,P′j。很显然,由于Pi,Pj是三维空间中的两定点,因此Pi,Pj两点在Of-xyz系下的距离应等于在Oc-xyz系下的距离,即:

将式(3)经过变形可构造特征点间距关系方程,由式(4)表示为

设Pi,Pj在Oc-xyz系下的向量为Ri,Rj,则

式中
在得到测距后,采用QUEST姿态求解算法[8]得到探测器本体坐标系相对着陆点坐标系的姿态转移矩阵和姿态欧拉角。
5 数值仿真实验
为了验证测距与定姿算法的可行性,建立如下的仿真系统,设定图1中的点(222,444)为探测器下降着陆点(图中箭头所指),CCD导航相机的分辨率为300×300像素,相机焦距为10mm,一个像素的实际大小为0.1mm×0.1mm,光心位于(150,150)处,经过特征点提取,在图像中可以获得5个特征区域,经过与图像数据库(表1~3)的匹配得到序号为4、6、9、12、13的5个特征区域。建立着陆点坐标系Of-xyz,着陆点即位于坐标原点,各坐标轴如前所述。查找数据库得到这5个特征区域中心点的位置坐标分别如表4所示。
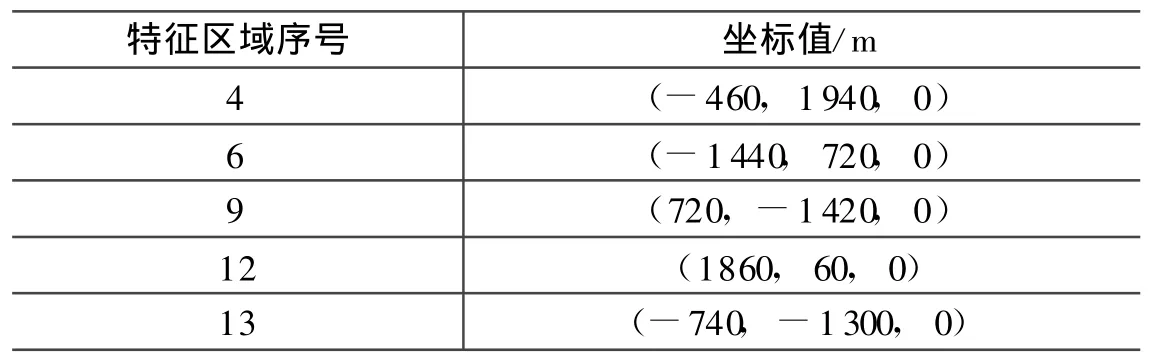
表4 Of-xyz系下特征区域中心点坐标值
将原图像在图像平面内分别旋转0°、5°、8°、10°、15°,用来模拟探测器在下降过程中相对于着陆表面,滚动角处于上述角度时所拍摄得到的5幅不同的图像,得到像点坐标如表5所示。

表5 Oc-xyz系下像点坐标值mm
经过第4节的测距与定姿算法计算得到测距值和姿态角结果如表6所示。
表6 测距值和姿态角值
结合二维运动估计相关理论,本文提出的基于地形特征库的测距与定姿算法可以很好的解决因小行星自转速度快导致特征点溢出相机视野的问题。表3建立了特征点位置相关性信息,针对每个特征点都可以在表中查找得到与之距离最近的两个特征点的位置坐标及位置相关向量。探测器在着陆过程中,部分特征点可能会溢出导航相机视野,此时只需要跟踪与这些溢出特征点位置靠近且仍停留在相机视野里的另一组特征点,通过提取这些特征点,在数据库中查找得到与之距离靠近的溢出特征点的空间三维位置信息,随后结合二维运动估计相关理论,依靠这组未溢出视野特征点的像素坐标变化情况,建立像点二维运动模型,从而估计得到溢出特征点的像点坐标,这样就得到了溢出特征点的空间三维坐标和像点坐标,最后运用上述的测距与定姿算法进行求解。
如图7、图8是探测器在平移运动过程中拍摄得到的前后两帧图像,对图7经过特征提取,经过与数据库中匹配得到序号为4、6、9、12、13的特征点(图中白框表示),用同样的操作在图8中得到序号为4、6、13的特征点(图中白框表示)。经过在数据库中查找得知溢出特征点序号为9、12。
图7 前一帧图像
图8 后一帧图像
根据前后两帧图像中序号为4、6、13特征点的图像坐标,计算这三个点横、纵坐标平移量的均值作为图像行、列方向的平移量,从而可估计得到序号为9、12的溢出特征点在图8中的图像坐标,如表7所示,测距值如表8所示。

表7 前后两帧特征点图像坐标

表8 前后两帧测距值
经过大量计算结果表明,姿态角在0°~30°范围之内,误差可控制在正负0.5°之内,超过30°,误差将增大,对测距和定姿结果有一定影响。考虑到探测器在下降过程中,为了保证着陆安全,发动机喷管要保证垂直于着陆平面,即探测器只有垂直速度,没有水平速度,因此探测器相对着陆平面的姿态角变化不会太大,在较小的姿态角变化范围之内,本文的测距与定姿算法可以保证较高的精度。
6 结束语
本文针对小行星自转速度快,表面地形特征点较难跟踪,容易溢出导航相机视野的情况,设计了基于建立图像数据库的测距、定姿算法。本算法首先采用Forstner算子提取着陆点全景图像的特征区域,将特征区域图像的位置信息、位置相关性、图像纹理信息、熵信息存入图像数据库,然后利用计算机视觉原理针对匹配得到的特征区域在CCD图像中的像素位置,运用2D到3D的转化关系得到探测器和各个特征区域的直线距离以及探测器相对着陆平面的姿态角信息,为后续的自主实时导航提供了较高精度的位置和姿态信息。最后通过仿真实验验证了这一方案的可行性。
本文仅针对着陆地区建立了地形特征库,适用于探测器最终逼近阶段,为了将本文的测距与定姿方法应用到探测器软着陆小行星的全过程,需要建立目标小行星全景范围的地形特征库,同时考虑到小行星形状大小并不规则,且受光照条件影响较大,尤其是在光照角度较小时图像较暗,很难精确跟踪特征点,因此要建立全景的地形数据库将是一项巨大且艰巨的工程。为此,本文作者正在做这方面研究的一些尝试和探索。
[1]MISU T,HASHIMOTO T.Optical Guidance for Autonomous Landing of Spacecraf t[R].IEEE Transactions on Aerospace and Electronic System,1999,35(2):459-472.
[2]KAWAGUCHI J,HASHIMOTO T,KUBOTA T.Autonomous Optical Guidance and Navigation Strategy around a Small Body[J].Journal of Guidance,Control and Dynamics.1997,20(5):1010-1220.
[3]KUBOTA T,HASHIMOTO T.An Autonomous Navigation and Guidance System for MUSES-C Asteroid Landing[J].Acta Astronautica.2003,52:125-131.
[4]翟冬丽.基于图像序列的小行星软着陆导航方法研究[D].哈尔滨:哈尔滨工业大学,2006.
[5]胡维多,等.飞行器近小行星轨道动力学的特点及研究意义[J].天文学进展,2009,27(2):152-166.
[6]杨帆,等.数字图像处理与分析[M].北京:北京航空航天大学出版社,2007.
[7]朱仁璋.航天器交会对接技术[M].长沙:国防出版社,2007.
[8]SHUSTER M D.Three-Axis Attitude Determination from Vector Observations[J].J.Guidance and Control,1981,4(1):70-77.