基于转向盘角速度的电动助力转向系统回正控制
2010-11-22过学迅杨胜兵
马 葳,过学迅,杨胜兵
(武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉430070)
电动助力转向系统EPS (electric power steering)是一种直接依靠电机提供辅助扭矩的动力转向系统,与传统的液压助力转向系统HPS(hydraulic power steering)相比,EPS 系统具有很多优点:仅在需要转向时才启动电机产生助力,能减少发动机燃油消耗;能在各种行驶工况下提供最佳助力,减小由路面不平所引起电动机的输出转矩通过传动装置的作用而助力向系的扰动,改善汽车的转向特性,提高汽车的主动安全性;没有液压回路,调整和检测更容易,装配自动化程度更高,且可通过设置不同的程序,快速与不同车型匹配,缩短生产和开发周期;不存在漏油问题,减小对环境的污染。
回正控制是电动助力转向控制的主要方面,如果不进行回正控制,在低速时汽车将出现转向回正不足的情况。在回正控制中,已有的控制方法有:1)利用转向盘转角信号控制电动机来实现转向盘的回正;2)采用回正力矩估计的方法控制电动机提供辅助回正力矩;3)以试验数据为依据,列出数据表格,提供回正时的电动机输出力矩。为了进一步提高电动助力转向系统的回正性能,采用了基于方向盘角速度查表的控制策略,并将回正助力控制和主动阻尼控制结合起来,相应地设计了系统的软件和硬件,实现了转向系统的快速平顺回正。
1 电动助力转向系统实验台的设计
1.1 电动助力转向系统的模型和工作原理
电动助力转向系统主要由方向盘、转向轴、减速机构、助力电机、齿轮齿条、传感器、ECU等组成,其结构如图1所示。

图1 电动助力转向系统模型
运用牛顿运动定律建立电动助力转向系统的动力学方程:

其中,Th为驾驶员作用在转向盘上的力矩;Kt为转向杆的刚度;θsw为转向盘的旋转角;θsc为转向柱的旋转角;Bsw为转向盘的阻尼常数;Jsw为转向盘的转动惯量。Bsc为转向柱的阻尼常数;Jsc为转向柱的转动惯量;Kr为齿条小齿轮间的刚度;Fr为作用在齿条方向上的轮胎回正力;br为齿条的阻尼;mr为齿条的质量。
电机的电气方程式和机械方程式如式(4)、式(5):
其中,E为电机两端电压;Kb为电机反电动势常数;R为电机线圈的电阻;L为电机线圈的电感;Bm为电机的阻尼;Jm为电机的转动惯量。
EPS系统的工作原理:电动助力转向系统的转向轴上安装有转矩传感器,当驾驶员转动方向盘时,转矩传感器测得的转向助力矩信号和车速传感器测出的车速信号被一并送到电控单元(ECU)中,ECU根据输入的转矩和车速信号通过合理运算获得所需助力的大小和方向,并向电动机发送控制信号,电动机根据控制信号输出相应的转矩,并经由减速机构和齿轮齿条传递到转向横拉杆,完成助力转向。
2.3 电子控制单元
实验中采用的ECU是一个飞思卡尔S12系列的16位单片机系统,如图2所示。输入信号为转角信号、扭矩信号和模拟车速信号等,输出为PWM,驱动模块包括1个电动机的驱动电路,由4个场效应晶体管MOSFET构成,其形式为一个H桥式开关电路,根据电动机驱动信号控制MOS-FET的占空比,确定作用在电动机两端的平均电压,也就控制了电动机电流的大小和方向。
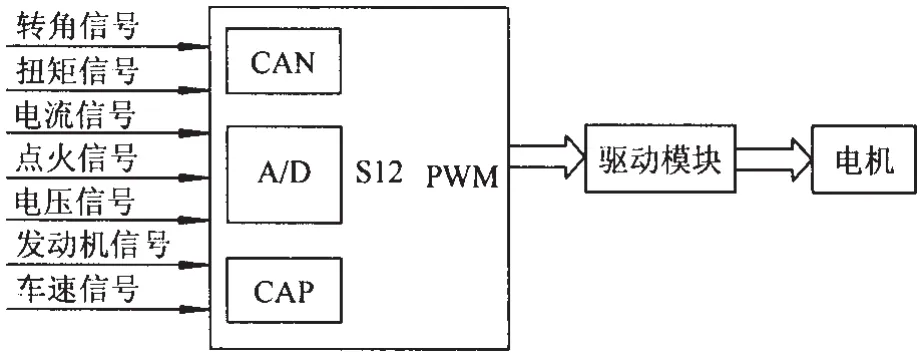
图2 电控单元的结构
驱动模块电路原理图如图3所示。在进行回正助力控制时,ECU根据当前的转向盘转角和角速度,按照一定的控制策略发出相应的控制信号,以使电动机提供相应的回正力矩;在主动阻尼控制中,电控单元根据电动机绕组发生短路时,电动机产生一个大小与其转速成正比的反向转矩的特性,对电动机进行阻尼控制。
2.4 实验台结构设计
根据电动助力转向系统的特点,设计了回正控制实验台,其结构如图4所示,此实验台主要包括助力部分和阻力模拟部分。助力部分包括方向盘、转向角度传感器、输入车速信号、扭矩传感器、减速机构、助力ECU和助力电机。阻力模拟部分包括减速机构、模拟阻力ECU和模拟电机。通过模拟阻力ECU控制模拟电机模拟各种回正环境,助力ECU在各种回正环境下控制助力电机实施回正。

图3 驱动模块电路原理图
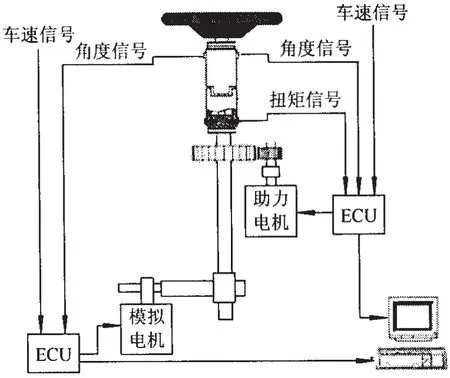
图4 回正实验台结构
3 回正控制算法
回正是指在汽车行驶的过程中,驾驶员转动方向盘,使转向轮与行使方向形成一定角度,回正力矩能够使方向盘自动的回到中间位置。在研究回正特性时,一般将其划分为2个方面来探讨:一个是回正不足,它是指在低速时转向力矩不能克服路面和系统中的摩擦等而导致的方向盘不能回到中间位置的现象;另一个是回正过度,它是指汽车在高速行驶时车辆的横摆阻尼变小,回正时超过了中间位置,而使车辆出现横摆振荡的现象。在电动助力转向系统中,通过对电机的适当控制,可以很好地解决上述问题,提高系统的回正性能。
当出现回正不足的情况时,可控制助力电机提供合适的力矩,帮助方向盘回正,此控制策略称之为回正助力控制;当出现回正过度时,对电机实施主动阻尼控制,使转向盘在有阻尼的状态下回到中间位置,从而避免摆振。为了达到使方向盘快速准确地回到中间位置的目的,采用将回正助力控制和主动阻尼控制结合起来的控制策略。
当系统进入回正控制时,先通过方向盘的角度信号判断回正的方向,然后根据方向盘的角速度大小判断是进行回正助力控制还是主动阻尼控制。如果此位置的角速度大于阻尼控制角速度的给定值,则进入主动阻尼控制;反之,则进入回正助力控制。
为了达到上述目的,采用了基于转向盘角速度查表闭环控制,图5为其控制框图。通过查表获得角速度参考OmegaRefer,按照规定,转向盘应在3 s内从最大转角处回正至中间位置,角速度参考OmegaRefer的大小与系统的阻尼、转向盘角度、回正时间等有关。Omega为转向盘回正时的角速度,PID控制的输入为DeltOmega,它是OmegaRefer和Omega的差值,输出为施加在电机上的电压,其大小通过PWM占空比实现控制。回正控制状态划分如表1所示。
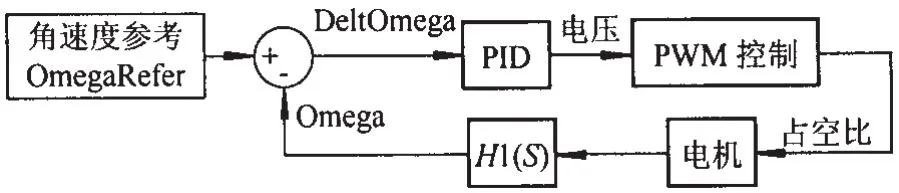
图5 角速度控制框图

表1 回正控制状态划分
4 实验方法及结果
回正实验台如图6所示。
将允许的回正残留角设置为5°,转动方向盘,使转向盘转角为360°,然后释放,且设定汽车在低速行驶工况,通过改变PID控制中角速度的值使得回正时间在1~2 s,使转向盘转角在各指定角度释放,回正残留角和回正时间分别通过显示屏输出,实验数据如表2所示。

图6 回正实验台
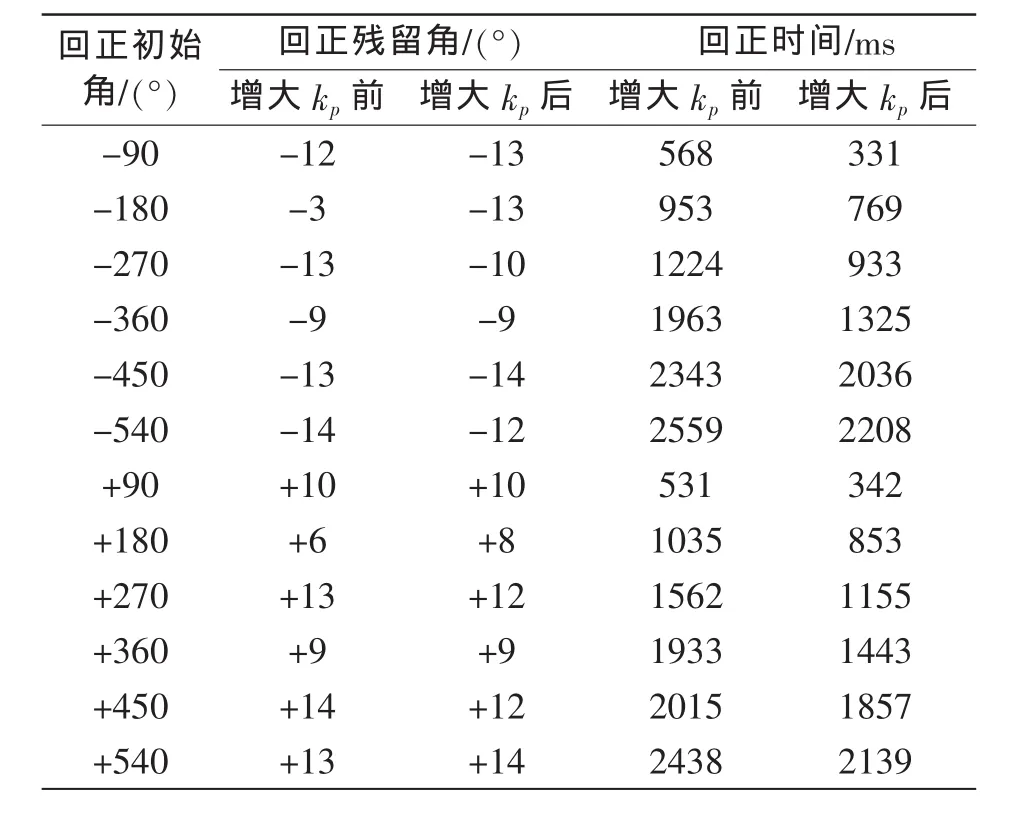
表2 增大kp前后回正残留角及回正时间的对比
实验结果表明:在各种工况下,系统都能够在要求的时间内回正,且角速度kp越大,回正越快。在实验结果中,回正残留角有的值大于±5°,是由于系统阻尼不明、回正控制状态划分不够细密等,需要进一步改进和调试。
5 结 论
本文主要研究了电动助力转向系统的回正控制,根据回正控制中的两大主要矛盾:回正不足和回正过度,将回正助力控制和主动阻尼控制结合起来,采用了基于角速度查表的闭环控制,设计开发了EPS ECU硬件和软件程序,并在实验台架上进行了系统实验。实验数据表明,此回正方法改善了车辆的转向回正性能,且回正速度合适。
[1] Ji-Hoon Kim, Jae-Bok Song.Control Logic for an Electric Power Steering System Using Assist Motor[J].Mechatronics, 2002(12):447-459.
[2] 徐建平,何 仁,苗立东,等.电动助力转向系统回正控制算法研究[J].汽车工程,2004,26(5):557-559.
[3] 吴文江,季学武,杜彦良.电动转向控制系统跟踪性能研究[J].机械工程学报,2004,40(4):77-80.
[4] 徐 涛,过学迅,杨 波,等.基于转角的电动助力转向系统回正性能控制 [J].湖北汽车工业学院学报,2009,23(1):4-7.
