仿肌肉驱动器设计与仿真
2010-11-22尤向荣秦现生张顺琦
尤向荣, 秦现生, 王 伟, 张顺琦
(西北工业大学, 陕西西安 710072)
0 引 言
仿肌肉驱动器是目前国内外仿生研究的热点,动物肌肉有很多传统驱动器没有或远达不到的性能,如功率/重量比高, 运动机构简单, 能量可以储备,以实现强大的爆发力等。仿肌肉驱动器的设计和实现比较有代表的方向有形状记忆合金(以下简称SMA)、电致伸缩聚合物(以下简称EAP)、压电陶瓷(以下简称PZT)和气动人工肌肉(以下简称PMA)。 SMA驱动器的应用较多, 文献[1 -2] 都利用SMA丝实现了对仿生机器人的驱动, 文献[3] 介绍了电致伸缩聚合物的驱动原理,文献[4]利用压电陶瓷设计了压电直线电动机;气动人工肌肉种类繁多, 文献[5] 对气动人工肌肉的原理及应用进行了阐述,文献[6] 概述了仿肌肉驱动器的发展现状以及各种仿肌肉驱动器的原理和应用。一个好的仿肌肉驱动器应具有优秀的驱动特性和高疲劳寿命,并且一维伸缩、应变大、强度好、无噪声、能量密度大和柔顺性好等特征, 仿肌肉驱动器的研究虽然取得了一些成果,但现有的仿肌肉驱动器远未达到上述目标。本文通过分析模仿动物骨骼肌的结构和运动形式, 设计了一种基于电磁场的新型仿肌肉驱动器,并通过电磁场分析对其结构参数进行了优化。
1 动物肌肉结构和工作原理
动物肌肉(骨骼肌)的组织结构如图1a所示。肌肉的基本单元是肌小节,肌小节经过串联组成了肌原纤维,肌原纤维经过并联组成了肌纤维,肌纤维再经过并联组成了肌肉。因此肌肉的伸缩其根本在于肌小节的运动。 H.E.Huxley和A.F.Huxley在1954年分别独立地提出肌肉收缩的肌丝滑行学说,该学说认为:肌小节的缩短是细肌丝在粗肌丝之间主动地相对滑行结果[7]。
图1b描述了肌小节的两种运动状态,上面为伸张状态, 下面为收缩状态。肌小节两种状态的变化最终导致了肌肉的伸展与收缩。本文设计的仿肌肉驱动器就是以此为基础建立的。
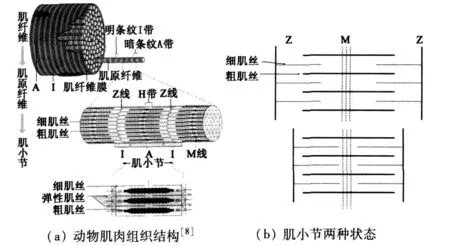
图1 动物肌肉结构
2 驱动器设计
通过图1可以看到, 单个肌小节实现的运动比较简单,只有伸缩两个状态。仿肌肉驱动器的设计就是遵循这一原理, 首先是设计出实现肌小节伸缩运动的装置,再通过串并联结构实现对肌肉的仿生。
电磁力的发现及应用推动了整个世界的发展,电动机可以说是现代社会的动力之源, 而且电磁力的理论基础及应用都比较成熟, 所以在设计仿肌肉驱动器时首先想到的就是设计出一种结构能更好地应用电磁力来实现肌小节的运动。文献[9] 中涉及到电致伸缩器为仿肌肉驱动器的设计提供了一种思路,但是电致伸缩器存在着抗疲劳性差, 电磁场利用不全面等缺点。由于仿肌肉驱动器要实现一维运动,传统的旋转电机要实现一维直线运动,必须通过丝杠-螺母机构把旋转运动变换成直线运动, 这损耗了很大一部分能量, 而且响应速度很慢。因此传统电机也很难实现仿肌肉驱动器的设计。
但是本文从步进电机中得到了启发,步进电动机的原理如图2a所示, 当A相通电时,转子的1、3极脚与定子的A相极脚对齐, 当B相通电时, 转子的2、4极脚与定子的B相极脚对齐,在A、B相变化中转子转过了一个角度。在设计仿肌小节的结构中,利用步进电动机的原理,把旋转运动的步进电机沿轴向劈开,形成了如图2b所示的结构。 A相极脚依然和1、3极脚相对齐, B相极脚和2、4 极脚错开一定的距离,当A相通电时,由于电磁力的作用, 使1、3极脚和A相极脚对齐。当A相断电, B相通电时, 2、4极脚和B相极脚对齐,这样通过控制A、B相的通断电就实现了类似肌小节Z线和M线之间的相对伸缩运动。
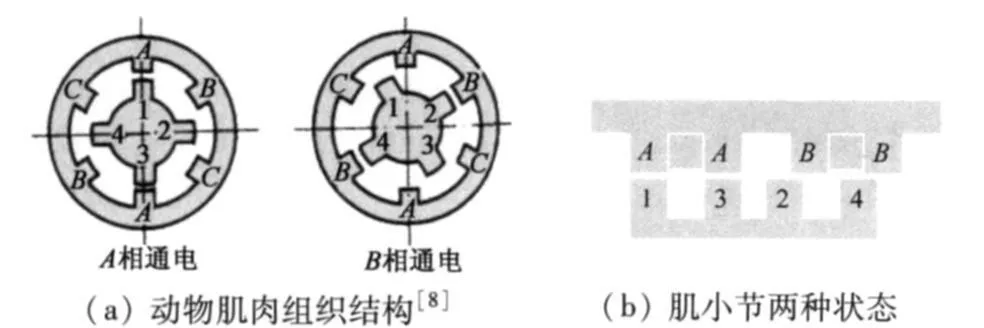
图2 仿肌小节驱动器原理
根据以上原理设计了仿肌小节驱动器, 但是在实际机械设计中发现, 平板式的驱动器需要的部件较多, 结构较复杂,这和仿肌肉驱动器简单高效的要求是相违背的。因此对机械结构进行了创新设计,用圆筒型结构代替了平板结构, 模型如图3所示。圆筒型结构具有结构简单、磁路对称性好、电磁场利用率高、加工方便等优点,也提高了能量密度。

图3 仿肌小节驱动器
仿肌小节驱动器的静子[11]和动子是相互分离的,两者靠电磁力来保证相对的位移。这样提高了抗疲劳强度, 而且静子和动子可以看作是弹性非线性系统, 这和肌肉是非常类似的。
仿肌肉驱动器是仿肌小节驱动器经过串并联形成的,如图4所示。串联的形式是上一级的仿肌小节驱动器的动子连接下一级的静子,依次相连。串联在一起的肌小节驱动器就可以实现和肌原纤维相类似的功能, 通过控制不同肌小节驱动器的伸缩状态, 就可以实现整串的长度、位移以及速度等运动特性。几串肌小节驱动器并联在一起就组成了仿肌肉驱动器。通过控制不同串的伸缩及通断电状态, 就可以调整整个仿肌肉驱动器对外的输出力大小。
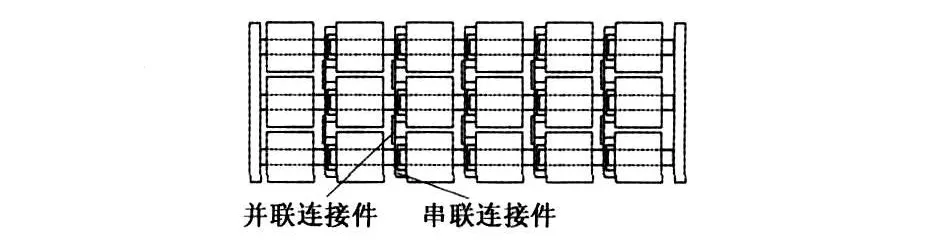
图4 仿肌肉驱动器
3 电磁场有限元分析
仿肌肉驱动器性能直接取决于电磁场设计的合理与否, 磁路设计以及精确预测电磁力需要对电磁场进行数值计算和分析。电磁场数值方法包括有限元法、有限差分法、边界单元法等, 而比较通用和流行的是有限元法, 并且有许多可以进行有限元分析的软件, 比较有影响的有:美国Swanson Analysis System的ANSYS有限元产品;美国 MacNcal Schwendlert Corp的MSC/EMS软件;加拿大Integrated Engineering Software Inc.的系列产品以及美国Ansoft Corp.的Maxwell软件等。本文采用的是ANSYS软件的二维有限元磁场分析。
ANSYS电磁场分析首先求解出电磁场的矢量磁势和标量电势, 然后经过处理得到其他电磁物理量, 如磁力线分布、磁通量密度、电场分布、涡流电场以及系统能量损失等。
3.1 仿真模型参数确定
对仿肌小节驱动器电磁场进行有限元分析, 要对其模型进行简化。图3是驱动器的模型剖面图,由于模型具有轴对称特征,因此可以把模型简化为二维模型。
对二维静态磁场进行有限元分析, 要首先选定分析中用到的单元。 本文中选定的单元是PLANE53,它的形状是四边形含8节点或者退化为三角形含6个节点。它主要用来分析矢量磁势、时间积分电势、电动势压降等,如图5所示。

图5 PLANE53单元[ 1 0]
对仿肌小节驱动器进行ANSYS建模并对其进行网格划分,如图6所示。模型由六部分组成,其中

图6 ANSYS网格划分
动子和衔铁采用的材料是电磁纯铁DT4;绕组采用是直径为0.2 mm的漆包线;环采用的材料为铝合金,主要起到调整A相和B相距离的作用,进而可以调整肌小节驱动器的行程。各个部分的电磁参数如下(μr为相对磁导率):
动子:μr=1 500;衔铁:μr=1 500;线圈:μr=1 500,匝数n=300,电流I=1.5 A;铝环:μr=1;空气:μr=1。
在ANSYS电磁场分析中,励磁线圈需要电流密度。电流密度的计算如下:
3.2 电磁场仿真分析
在A相通电、B相断电的情况下对模型进行加载求解,其电磁场磁力线如图7所示。由图7可知,驱动器的磁场设计是合理的,磁力线集中在A相和动子之间, 漏磁比较少。计算结果显示, 动子和静子在Y方向(水平方向)产生的电磁力为10.9 N。仿肌小节驱动器的质量经测量为0.03 kg,力重比达到了36.3。

图7 磁场分析结果
仿肌肉驱动器是仿肌小节驱动器经串并联而成的。在串联方面,由于力的传递性, 不存在力叠加问题,力重比会有一定的下降,但是可以通过并联的方式来增加驱动器的输出力。仿肌肉驱动器的响应速度可以达到ms级,最大效率可以达到90%以上,最大应变也在20%以上,并且无噪声, 抗疲劳强度高,柔顺性较好。本设计还实现了驱动器的双向移动,在驱动过程中,进一步提高了驱动器的响应速度和综合性能,达到了预期的研究目的。
4 结 语
本文通过模仿动物肌肉, 利用电磁装置设计实现了仿肌肉驱动器, 并通过对其进行有限元建模分析, 分析了模型的结构参数, 并验证了模型的正确性。
该设计还有需要改进的地方,如体积相对较大,功率密度还相对较低等。但是仿肌肉驱动器在很多方面都取得了突破性进展,为各种仿肌肉驱动器的研究提供了新的思路和方法, 这一驱动器正在应用于仿生关节驱动器的设计中。
[1] 章永华, 马记, 何建慧.基于人工肌肉的仿生机器鱼关节机构设计与力学分析[J] .机器人, 2006, 28(1):40-44.
[2] Laurentis K JD.Optimal Design of Shape Memory Alloy Wire Bundle Actuators[C] //IEEE International Conference ofRoboticsand Automation.2002:2363 -2368.
[3] 彭光正, 余麟, 刘昊.气动人工肌肉驱动仿人灵巧手的结构设计[J] .北京理工大学学报, 2006, 26(007):593-597.
[4] 孟益民, 黄卫清.新型压电直线电动机的设计[J].微特电机,2009, 37(1):18 -20.
[5] 杨钢, 李宝仁, 刘军.一种新型气动执行元件——气动人工肌肉[J] .中国机械工程, 2003, 14(015):1347-1349.
[6] 王伟, 秦现生.仿肌肉驱动器及其在仿生机器人中的应用[J] .微特电机, 2009, 37(6):56-60.
[7] 应申舜, 秦现生, 汪文旦, 等.基于SMA弹簧阵列的人工肌肉实现机理与结构设计[J] .中国机械工程, 2008, 19(15):1782-1785(EI:083711538121).
[8] 陈守良.人类生物学[M] .北京:北京大学出版社, 2001.
[9] Jin X, Yan J, Xia Y, et al.Investigation ofelectrostriction appliance and its application[J].Journal of Southeast University, 2006, 22(1):82 -87.
[10] 唐兴伦, 范群波, 张朝晖, 等.ANSYS工程应用教程-热与电磁学篇[M] .北京:中国铁道出版社, 2003.
[11] 李猷黔.直接驱动直线交流伺服电动机[J].微电机, 1998(3):47-49.
