双馈风力发电机有功功率和无功功率的滑模解耦控制*
2010-11-21刘远涛杨俊华谢景凤刘慧媛
刘远涛,杨俊华,谢景凤,刘慧媛,吴 捷
(1.广东工业大学自动化学院,广东广州 510006;2.华南理工大学电力学院,广东广州 510641)
0 引言
风能是一种随机变化的过程性能源,为提高风能的利用率,通常采用变速恒频发电方案,交流励磁变速恒频双馈电机定子绕组直接接工频电网,转子绕组通过变频器和电网相连,通过改变转子侧供电电源的频率、幅值、相位及相序,能在较宽的转速范围内实现双馈发电机的变速恒频控制、最大风能捕获控制、发电机输出有功功率和无功功率的解耦控制。和转子绕组相联的功率变换器只需处理转差功率,变换器的容量可大大减小。
双馈风力发电系统中,发电机有功功率和无功功率的解耦控制是变速恒频发电技术的难点和关键[1-2]。国内、外学者已经做了很多相关研究[1-6],但大多数采用传统的PI控制算法。文献[3]在双馈异步发电机(DFIG)有功与无功功率的解耦控制中应用了自抗扰控制策略;文献[4-6]研究了传统的比例积分(PI)双闭环控制策略应用于DFIG有功与无功功率的解耦控制,外环为功率控制环,内环为电流控制环。但建模误差及系统参数的摄动,给PI参数的整定带来困难。现代控制理论同样为控制实现提供了更多选择。滑模变结构控制本质上是一种不连续的开关控制,它要求频繁、快速地切换系统的控制状态,具有快速响应、对系统参数变化不敏感、设计简单、易于实现的特点,在风力发电系统中已有成功应用[7]。
在分析双馈异步电机的动态数学模型和基于定子磁场定向矢量控制的基础上,将滑模控制与比例积分控制相结合,给参数的整定带来了较大方便,能有效实现双馈风力发电系统有功功率和无功功率的解耦,提高了系统的动态响应和鲁棒性。采用李雅普诺夫稳定性理论研究了系统的稳定性,建立了MATLAB/Simulink环境下系统的仿真模型,仿真研究结果验证了控制策略的正确性和有效性。
1 基于定子磁场定向的双馈发电机矢量控制
双馈型风力发电机原理框图如图1所示。
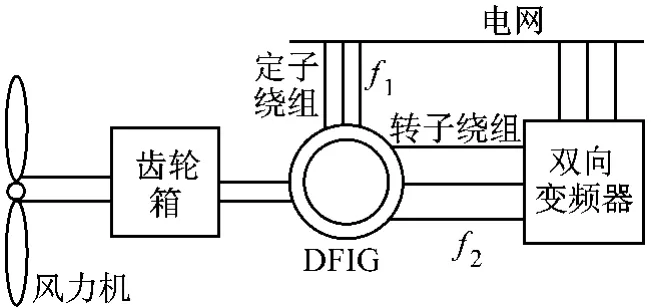
图1 双馈型风力发电机基本原理
三相坐标系下双馈发电机的数学模型是一个时变、非线性、强耦合系统,为实现发电机的有功功率、无功功率解耦控制,建立同步旋转坐标系下的双馈电机数学模型,采用了基于定子磁场定向的矢量控制技术。
1.1 双馈发电机的数学模型
根据交流电机的动态分析理论,当定子侧取发电机惯例时,转子侧取电动机惯例,双馈发电机的数学模型表示如下[8]。
定子电压方程为:

转子电压方程为:

定子磁链方程为:

转子磁链方程为:

发电机定子侧有功功率、无功功率方程为:

电磁转矩方程为:

运动方程为:

式中:uds,uqs,udr,uqr——分别为定、转子 d、q 轴电压;
ids,iqs,idr,iqr——分别为定、转子 d、q 轴电流;
Ψds,Ψqs,Ψdr,Ψqr——分别为定、转子 d、q 轴磁链;
Rs,Ls——分别为定子电阻和自感;
Rr,Lr——分别为转子电阻和自感;
p——电机极对数;
Lm——定、转子绕组间互感;
ω——同步角速度;
ωs——滑差角速度;
Tm——风力机作为原动机提供的驱动力矩;
J——转动惯量;
D——微分算子。
1.2 基于定子磁场定向的矢量控制
基于定子磁场定向的矢量控制参考坐标系如图2所示。
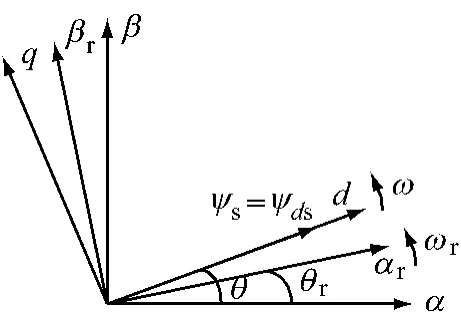
图2 定子磁场定向矢量控制参考坐标系
将同步旋转坐标系的d轴定向在定子磁场上,即取定子磁链Ψs方向与同步坐标系d轴重合,则定子磁链Ψs在d-q轴上的分量分别为:Ψds=Ψs,Ψqs=0。双馈发电机正常运行时,定子绕组直接接电网,始终在工频下运行,定子电阻压降远比电抗压降和电机反电势小,可以忽略电机定子绕组电阻[9],定子磁链保持恒定。
基于同步坐标系下,方程式(1)定子电压矢量转换为:

由式(3)、(4)可得定子电流方程为:

同步旋转坐标系下,方程式(5)双馈电机的瞬时有功功率、无功功率转换为:
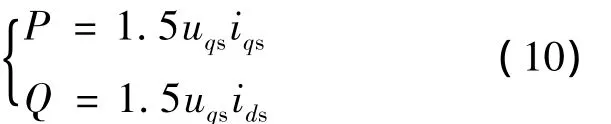
将式(8)、(9)代入式(10),则有

因为定子磁链Ψs恒定,由式(11)可得,在时间常量Ts内,有功功率、无功功率的变化量为:

由图2可知,滑差角速度ωs=ω-ωr。忽略转子绕组压降,在时间常量Ts内,调节转子电压来消除有功、无功功率误差。基于同步旋转坐标系,由式(2)、(11)、(12)可解得:

方程式(13)右边第一项用来减小有功、无功功率误差,第二项用来补偿转差引起的扰动。
2 滑模控制器设计
滑模变结构控制是变结构控制系统的一种控制策略,本质上是一种不连续的开关控制,它要求频繁、快速地切换系统的控制状态,具有快速响应、对系统参数变化不敏感、设计简单、易于实现的特点。变结构控制系统的设计基于其运动特点及运行过程,通常分为两个阶段:能达阶段和滑动阶段。滑动模态是可以设计的[10],且与系统的参数及扰动无关,处于滑模运动的系统具有很好的鲁棒性。
2.1 滑模面s的选取
双馈风力发电机滑模功率解耦控制方框图如图3所示。根据式(13)的关系,引入偏差变量,定义系统跟踪误差:
选取滑模面如下:
式中:c1、c2为滑模参数,选取适当的滑模参数,可使系统在滑模运动段有良好的动态品质[10]。
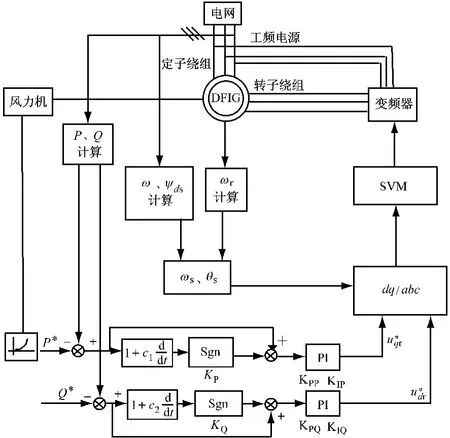
图3 双馈风力发电机滑模功率解耦控制框图
2.2 滑模控制器的设计
令s1=0、s2=0,由控制器解得等效控制解,转子绕组参考电压:
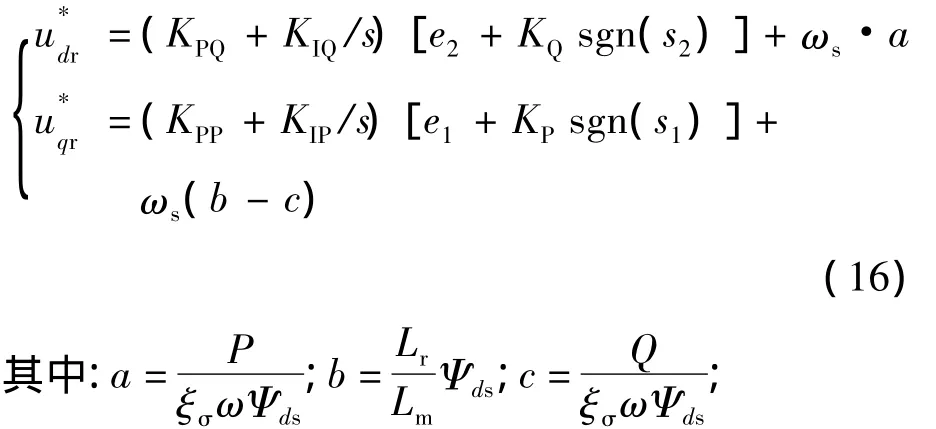
KPQ,KIQ——分别为无功功率 PI控制单元增益;
KPP,KIP——分别为有功功率PI控制单元增益;
KQ,KP——滑模控制单元增益。
联立式(14)~(16)可以证明滑模运动的广义存在条件式(20)成立,所以滑动模态存在。

在滑模运动段,功率控制器的输入可以限制系统状态在滑模面 s1、s2上。令 s1=0、s2=0,由方程式(15)解得:

由式(18)可知,方程的解与双馈电机参数和外部扰动无关,有利于PI控制单元的参数整定。主控制器包含一个滑模控制和一个PI控制单元。在暂态运行时,e1>KPsgn(s1)或e2>KQsgn(s2)时,PI控制单元起主要作用;在稳态运行时,系统跟踪误差很小,滑模控制单元起主要作用。在系统稳定范围内,仿真研究表明,适当选择控制单元的增益,可以很好地协调控制单元的控制效果。
2.3 滑模控制律的稳定性
对于能达阶段,定义李雅普诺夫函数:
由式(22)可得:
由式(14)~(17)可证明式(21)成立:

因此,滑模变结构控制系统在能达阶段稳定,最终一定能到达滑动稳定域,即s1=0,s2=0。
3 系统仿真研究
基于MATLAB/Simulink平台,建立了基于磁场定向的交流励磁双馈风力发电系统模型,对双馈风力发电机系统有功功率、无功功率的滑模控制策略进行了分析和仿真验证。DFIG参数为:额定功率2.5 kW,定子额定电压380 V,频率50 Hz;定子绕组电阻 Rs=1.9 Ω,定子绕组电感 Ls=0.25 H;转子绕组电阻Rr=2.3 Ω,转子绕组电感Lr=0.24 H;Lm=0.22 H。PI控制器增益:KPQ=0.3,KIQ=600,KPP=0.4,KIP=800;滑模控制器增益:KQ=1,KP=1.5,滑模参数:c1=0.000 1,c2=0.000 1。
仿真从稳态开始。图4为双馈风力发电系统无功功率给定调节过程,风速稳定在8 m/s,有功功率给定量P=1 kW不变。图5为无功功率给定量在8 s时由0.6 kVA变为0.8 kVA,在9 s时由0.8 kVA变为0.6 kVA,双馈风力发电系统有功功率P的响应曲线图,此时系统有功功率变化非常小,基本不受影响。图6为双馈风力发电系统有功功率调节过程,给定风速改变,但无功功率给定量Q=0.6 kVA不变。图7为t=13 s时,风速由8 m/s变为7 m/s;t=14 s时,风速由7 m/s变为8m/s,双馈风力发电系统无功功率Q的响应曲线图,此时有功功率P发生变化,由1 kW变为0.85 kW左右,而系统无功功率变化非常小,基本不受影响。

图4 无功功率Q调节过程

图5 DFIG有功功率P的响应

图6 有功功率P调节过程

图7 DFIG无功功率Q的响应
由以上分析可以得到:双馈发电机的有功功率和无功功率实现了有效的解耦控制,充分验证了该控制方案的正确性和可行性。
4 结语
在分析DFIG的动态数学模型和定子磁链定向矢量控制的基础上,将滑模控制与比例积分控制相结合,得到一种有效的双馈风力发电机功率解耦控制策略。应用李雅普诺夫稳定性理论分析了系统的稳定性,建立了MATLAB/Simulink环境下系统的仿真模型。仿真研究结果表明,该控制策略能够有效地实现双馈发电机有功功率和无功功率的解耦,而且功率解耦控制器具有较强的鲁棒性。
[1]张琦玮,蔡旭.最大风能捕获风力发电系统及其仿真[J].电机与控制应用,2007,34(5):42-46.
[2]刘其辉,贺益康,赵仁德.变速恒频风力发电最大风能追踪控制[J].电力系统自动化,2003,27(20):62-67.
[3]张先勇,吴捷,杨金明.基于自抗扰解耦的变速恒频风力发电功率控制系统[J].电气传动,2007,37(2):8-12.
[4]Pena Ruben,Cardenas Roberto.Control strategy of doubly fed induction generator for a wind diesel energy system[C]∥IEEE 28thAnnual Conference of the Industrial Electronics Society,2002,4(4):3297-3302.
[5]赵栋利,郭金东,许洪华.变速恒频风力发电机有功、无功解耦控制研究与实现[J].太阳能学报,2006(2):174-179.
[6]黄守道,谭健,许铮,等.双馈风力发电机有功、无功的解耦控制[J].电气传动,2008,38(9):7-10.
[7]Brice Beltran,Tarek Ahmed-Ali.Sliding mode power control of variable-speed wind energy conversion system[J].IEEE Trans Energy Conversion,2008,23(2):551-558.
[8]高景德,王祥珩,李发海.交流电机及其系统的分析[M].北京:清华大学出版社,1993.
[9]林成武,王凤翔,姚兴佳.变速恒频双馈风力发电机励磁控制技术的研究[J].中国电机工程学报,2003,23(11):122-125.
[10]王丰尧.滑模变结构控制[M].北京:机械工业出版社,1998.