联合收割机脱粒滚筒模糊控制系统的设计与仿真
2010-11-13翁仕鸿
翁仕鸿
(华南农业大学 工程学院,广东 广州 510642)
0 引 言
在谷物收获机械中,联合收割机是一种能把切割,脱粒、分离和清选等多项工作集中在一台机器上完成而直接获得清洁谷粒的农业机械,它的广泛使用极大地减轻了农民劳动强度,提高了劳动生产率。脱粒机中的脱粒装置是联合收割机的重要组成部分,对于脱粒性能一定的谷物联合收割机,为保证脱粒质量,其脱粒滚筒的角速度应控制在预期的范围内,影响脱粒滚筒的脱粒性能因素有很多,既有作物密度、谷物湿度等不可控因素,也有滚筒角速度、喂入量等可控因素。各种因素又互相联系,因此脱粒滚筒是一个复杂的非线性系统,滚筒角速度与各种性能影响因素之间难以建立一个精确的数学模型,这对传统控制理论应用带来极大的不便[1,2]。基于经验、规则和自学习,根据被控量的变化量和变化率进行模糊推理的模糊控制技术不需要知道被控系统的精确数学模型,为非线性复杂系统的控制提供一种有效手段。对于脱粒装置这样一个非线性时变且有较大延时的复杂系统[3,4,5],本文通过参考前人已研究的轴流脱粒滚筒数学模型以及实验参数,建立了联合收割机脱粒滚筒数学模型、模糊控制器以及整个控制系统的仿真,并且通过MATLAB语言编写程序代码生成控制表,为以后硬件实现的可行性打下一定的基础。
1.粒滚筒子系统的建立与仿真
1.1.粒滚筒功耗数学模型
以轴流脱粒滚筒为研究对象,其功耗模型为[1]:

J,r—滚筒的转动惯量和等效半径
N—发动机提供给滚筒的功率
a,b—反映滚筒克服运动副摩擦力和空气阻力的系数
f—搓擦系数γ—作物的谷草比
λ—茎稿出口速度和滚筒圆周速度之比
q—滚筒入口处的喂入量
H—割幅宽度ρ—作物密度υ—收获机行进速度
式(1)反映了滚筒运行状态的全部信息,其右边3项分别表示滚筒的输入功率、空转功率和有用脱粒工作阻力。=0意味着滚筒的输入功率与总的工作阻力相等,滚筒匀速转动,联合收割机处于稳定工作状态;<0表示由于喂入量增加或地表形貌恶化使总工作阻力大于发动机所能提供的最大功率,滚筒处于减速运行状态;>0说明总工作阻力小于脱粒滚筒的额定负荷,机组没有发挥最大生产能力,滚筒处于加速运行状态。忽略谷物在割台上的传输特性时,滚筒入口喂入量q可近似地表示为收割机割幅宽度H,考虑割茬高度的田间作物密度ρ以及机组行走速度υ之积,从而式(1)可转化为:

当联合收割机的结构和运动参数以及谷物的脱粒特性确定后,影响滚筒角速度的因素主要有ρ和υ,因而本研究的控制方案是:当田间作物密度ρ突变引起滚筒角速度变化时,控制机组的行走速度υ使滚筒角速度始终稳定在设定值附近。模糊控制器的输入量为滚筒角速度误差和其误差变化率(滚筒角加速度),输出量为联合收割机行走速度。
1.2.粒滚筒子系统的仿真
代入表1中的各个仿真参数[1,4],化简得
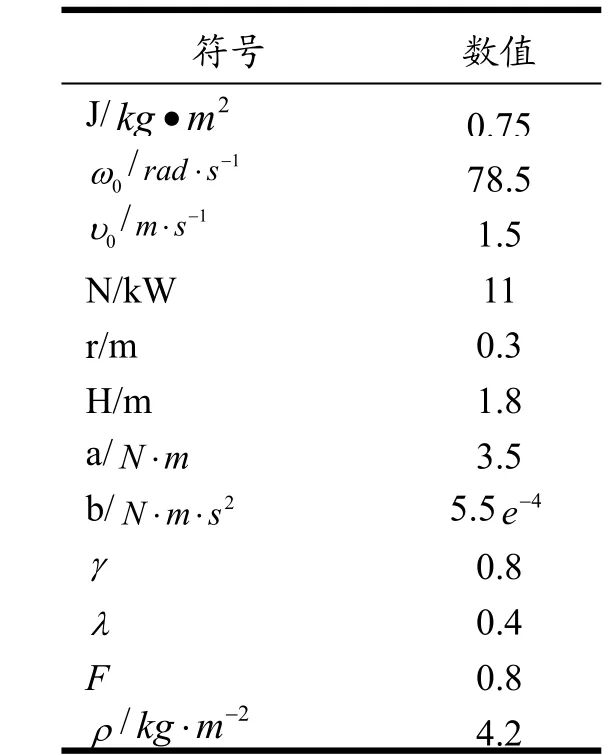
表1.真参数
在MATLAB的Command Window中键入命令Simulink并回车,就会弹出Simulink库浏览器,新建一个test.mdl文件,然后从Simulink模块库中找出需要的模块,利用鼠标将其拖到新窗口建立系统模型如图1,测试脱粒滚筒功耗数学模型,
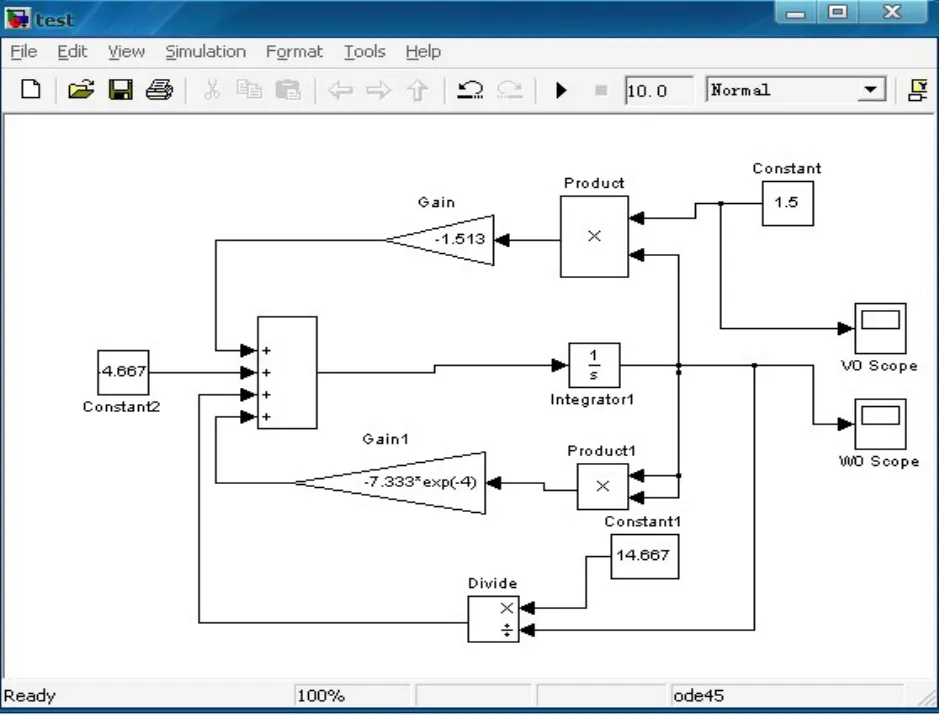
图1.粒滚筒功耗模型
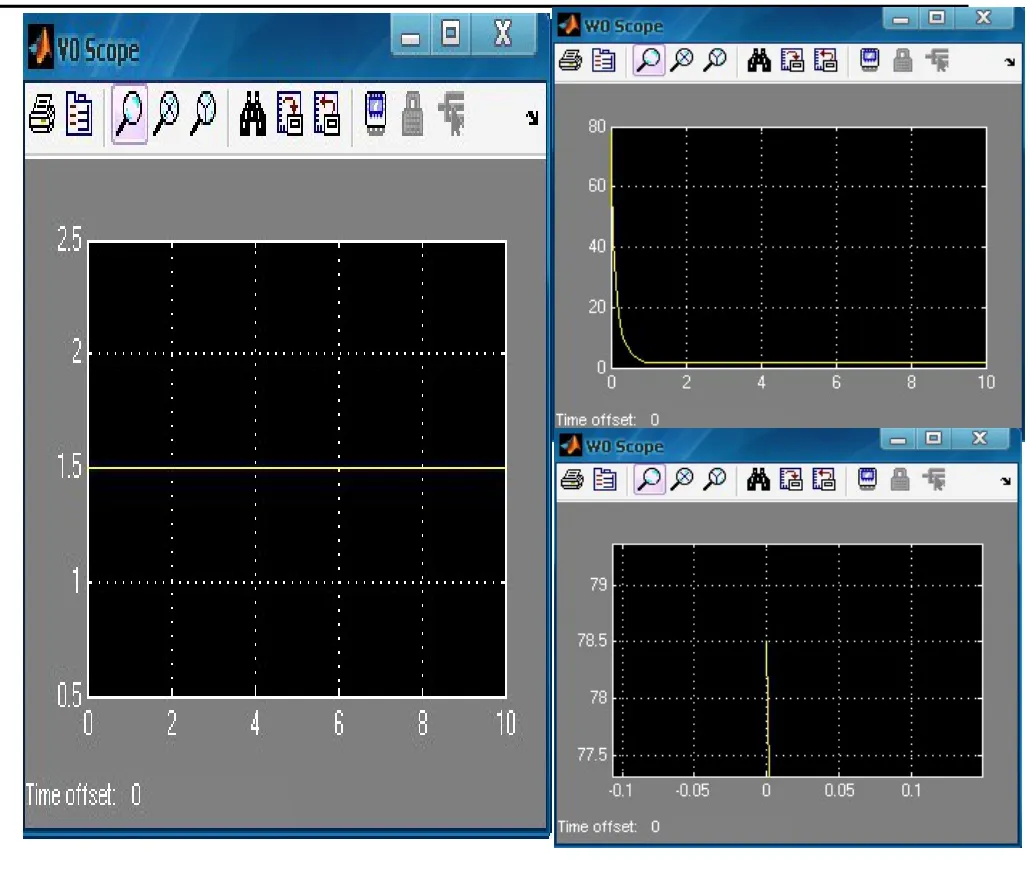
图2.波器输入输出稳定值
2.SIMULINK实现模糊控制器的可视化设计
取E、EC的论域为[-6,6] 以及U的论域[-7,7],其模糊子集均为{NB,NM,NS,ZO,PS,PM,PB}。共有49条模糊控制规则。利用MATLAB/SIMULINK模糊逻辑工具箱建立隶属函数。在 MATLAB的 Command Window中键入命令fuzzy,进入FIS(Fuzzy Inference System,模糊推理系统)环境。
默认建立的是一个单输入单输出的Mamdani型推理系统(常用Mamdani型推理和Sugeno型推理,Mamdani型推理使用最多,具有广泛的接受性,而Sugeno型推理在于计算效率高,适用于线性化技术以及数学分析)[6,7]。
添加一个输入变量,建立一个双输入单输出的Mamdani型推理系统,如图3所示。分别设置输入变量E、EC以及输出变量 U的 MF数目为 7个,对应模糊子集{NB,NM,NS,ZO,PS,PM,PB},并确定各变量的隶属函数类型,其中zmf为左开非对称函数,smf为右开的镜像函数,trimf为三角隶属函数,设置变量NB、PB分别为zmf型函数、smf型函数,其他为trimf型函数。如变量E得隶属函数如图4。
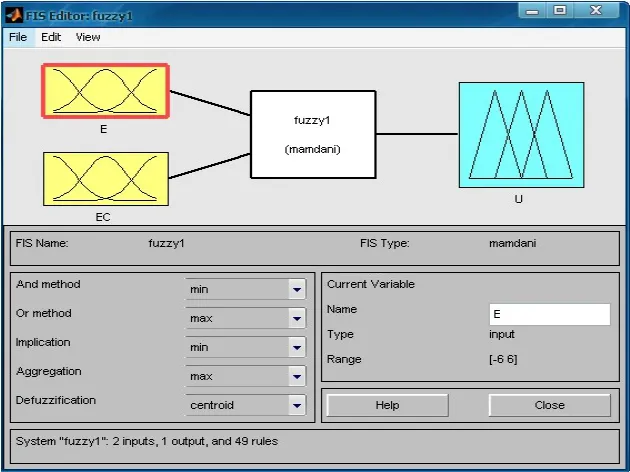
图3.输入单输出Mamdani型推理

编辑模糊控制规则及决策方法。控制规则是对专家的理论知识与实践经验的总结。由于有两个输入变量各有 7个语言值,以if语句按照模糊控制规则表2,编辑49条模糊规则,一般按模糊规则表从左到右,从上到下的顺序输入模糊规则,如ifE is NB and EC is NB then U is PB.按照同样的方法和步骤,输入第2条到第49条规则。

图4.立变量E隶属函数

表2.糊控制规则表
观察模糊规则以及模糊推理的输出曲面如图5所示,至此,就完成了整个模糊推理系统的建立,Export to file导出保存,将设计好的模糊控制器保存在一个名为fuzzy1.fis的数据文件中,以供仿真运行时调用。

图5.糊规则的显示及曲面图
3.个脱粒滚筒模糊控制系统的设计与仿真
在MATLAB的Command Window中键入Simulink回车,就会弹出Simulink库浏览器,新建一个fuzzy1.mdl文件,然后从Simulink库中找出需要的模块,利用鼠标将其拖到新窗口建立系统模型如图6,建立整个系统,其中调整比例参数K1=1、调整微分参数K2=1。
在fuzzy1.mdl建立好整个模型,然后调用模糊控制器FIS文件,在MATLAB的Command Window中键入fuzzy1=readfis('fuzzy1'),将前面生成的FIS文件加载到模糊控制器模块(Fuzzy Logic Controller )中,双击Fuzzy Logic Controller模块,在Parameters行中的FIS file or structure中输入fuzzy1,点击OK。利用模拟示波器来观察系统的动态响应情况。可以通过适当调整参数K1、K2进行仿真,结果如图7。
由示波器仿真结果可见:控制系统经过1.08 s调整后使滚筒角速度稳定在43.8 r ad⋅ s−1,偏差34.7r ad⋅ s−1,两者的和刚好为=78.5rad⋅ s−1,而行进速度在3.8 m ⋅ s−1与4 m ⋅ s−1中波动。因而通过脱粒滚筒模糊控制系统,滚筒的角速度能够稳定在额定值附近,能起到恒速控制,也就是说,通过控制行进速度一定的范围值从而对滚筒转速调控在额定值。另外,当负荷突变时,滚筒角速度的回调时间很短,因此可以预防滚筒过载堵塞现象[3]。

图7 滚筒角速度ω及其稳定值的仿真曲线图

图8.筒角速度误差0ω-ω及其稳定值的仿真曲线图

图9.整后的行走速度0uυ+及其稳定值的仿真曲线图
4.论
模糊控制基于模糊集合论、模糊语言变量及模糊逻辑推理,不要求给被控对象建立精确的数学模型,具有一定的鲁棒性,运用专家的控制规则表,在本文的仿真曲线图表明,联合收割机行进速度在一定范围中波动,通过脱粒滚筒模糊控制系统,滚筒的角速度能够稳定在额定值附近,另外,利用 MATLAB语言编写的程序代码生成的控制规则表可导入存储器,执行查表程序以控制被控对象,对以后的硬件控制板卡的恒速控制实现具有一定的可行性。
[1]张认成, 桑正中.轴流脱粒滚筒模糊控制仿真[J].农业机械学报, 2001, 32 (2):46-48.
[2]闫兰娟,师帅兵,李小红等.联合收割机脱粒滚筒转速监控系统[J].农机化研究, 2007, (2): 103-105.
[3]杨忠平,师帅兵,袁文胜等.联合收割机脱粒滚筒模糊控制器的设计[J].农机化研究,2006, (8): 93-94.
[4]李国栋,韩金仓,桑正中.联合收割机脱粒滚筒恒速智能控制器设计[J].控制工程,2007, 14(2):154-156.
[5]裘正军, 童晓星, 沈杰辉等.基于模糊控制与虚拟仪器的灌溉决策系统研究[J].农业工程学报,2007, (8): 165-169.
[6]李国栋,李勇智,张际先等.联合收割机脱粒滚筒的PID恒速控制[J].农业机械学报,2000, 31(1):48-50.
[7]张刚.基于模糊理论的城市配水系统 SIMULINK仿真技术研究[D]. 天津大学,2008.