非开挖 HDD地表变形数值模拟及DCRP识别技术研究
2010-11-07孙平贺乌效鸣
孙平贺,乌效鸣
(1.中国地质大学〈武汉〉工程学院,湖北武汉 430074;2.美国亚利桑那州立大学埃尔·富尔顿工程学院,美国 坦佩 85282)
非开挖 HDD地表变形数值模拟及DCRP识别技术研究
孙平贺1,2,乌效鸣1
(1.中国地质大学〈武汉〉工程学院,湖北武汉 430074;2.美国亚利桑那州立大学埃尔·富尔顿工程学院,美国 坦佩 85282)
采用非开挖水平定向钻进技术近地表施工时,由于地层及钻井液压力等原因易产生地表变形。结合美国梅萨市一处通信管道施工实例,对 0~0.9 MPa钻井液压力作用下的地表变形程度进行了数值分析,得到地表最大隆起量为 26 mm。采用DCRP技术及水准仪方法对该变形区域钻井液压力作用前后的地表进行位移检测,得到地表最大隆起量分别为 28 mm和 30 mm,表明数值模拟分析结果同现场检测结果比较吻合。同时,在现场所布置的26个检测点中,两种方法检测到的隆起量最大相差 2.7 mm,表明其精度比较接近。此外,由于 DCRP技术属于非接触式三维检测,受施工现场条件及人员操作限制少,故具有较为理想的应用前景。
非开挖水平定向钻进;地表变形;数值模拟;检测;DCRP识别
1 概述
在浅部地层采用非开挖水平定向钻进敷设管道过程中,由于地层、终孔直径、钻井液压力等原因极易导致地表变形事故的发生。地表变形一般表现为地表的隆起和下陷。当扩孔钻头经过某一孔段时,由于瞬时喷射的钻井液压力较高,钻井液无法短时间内沿钻孔轴线扩散,进而产生垂直轴线方向的“憋压”,导致地表隆起;随着压力的逐渐减小,一旦钻孔内压力无法支撑上部地层重力,则会产生地表下陷[1]。
本文结合实际工程,采用快速拉格朗日法分析了地表隆起同钻井液压力的关系,同时采用 DCRP(数字近景摄影测量)技术及水准仪对钻井液作用前后的地表进行实地检测,进而确定其变形程度。
该工程位于亚利桑那州梅萨市,如图 1左图所示。敷设管道为 3根通信管道,长度约 236 m,终孔直径为 22 mm,深度为 1.1 m,上部覆土为黄粘土,含水量接近于 0。由于终孔直径较小,施工方采用一级扩孔。而当扩孔钻头行至距离出土点约 70 m时,在钻孔轴线的正上方地表产生了非常明显的隆起,并有钻井液混合着地层粘土溢出,如图 1中右图所示。
2 数值分析
2.1 数值计算原理及准则
笔者采用三维连续快速拉格朗日法计算程序进行计算分析,简称 FLAC3D。该方法用于解决工程力学计算的有限差分计算程序。假定弹性杆件的两端受拉,侧面不受限制,杆件的密度为ρ,弹性模量为E,应力为σxx,位移为μx,则[2]:
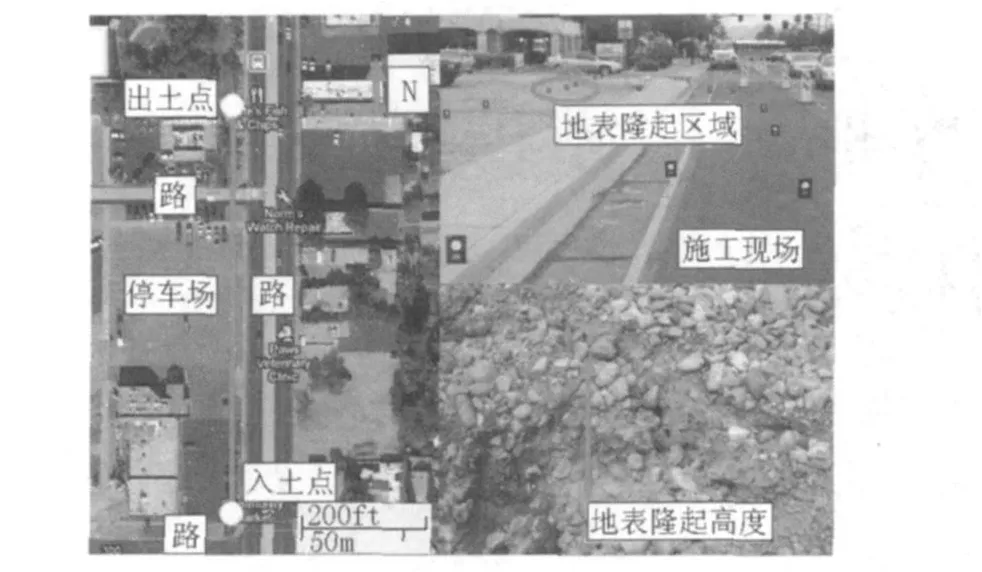
图 1 水平孔位置及地表隆起程度

根据上面两个公式可以建立拉格朗日位移μx的差分方程,即:

利用上面的迭代方程可以求得每个节点 (Gp)任意时刻的速度和位移增量。根据周围节点的运动速度求出区域网格 (Zone)的应变率和应力增量,如此循环直至问题收敛。将现场地层视为理想弹塑性体,按照Mohr-Coulomb准则进行计算。
2.2 模型建立及约束条件
根据该工程的实际工艺参数建立模拟分析网格,如图 2所示。长方体模型模拟实际钻进地层,采用 6 m×3 m×2.2 m尺寸。水平孔位于长方体的中心,三维坐标系位于水平孔的起始端,其中x方向为长方体的长,y方向为长方体的宽,z方向为长方体的高。水平孔的直径为 0.22 m,深度为 1.1 m,这均同实际工程参数吻合。
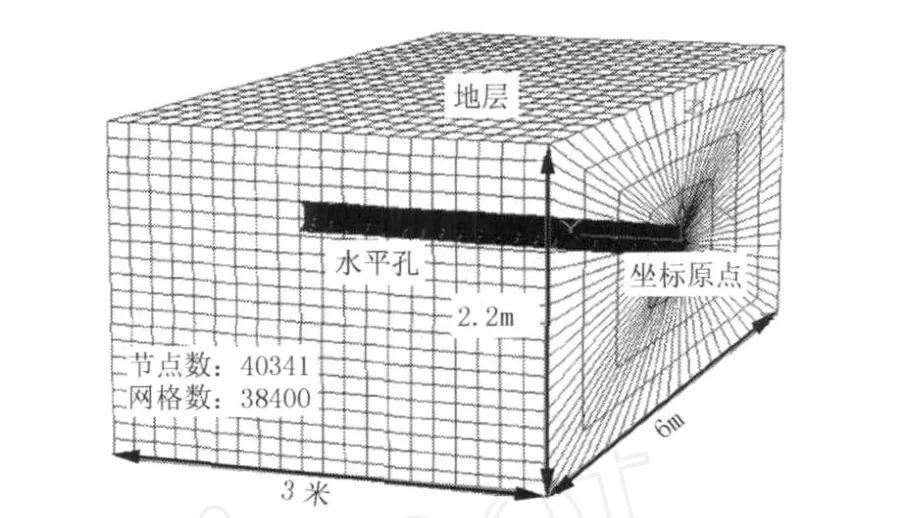
图 2 模型体的建立
模型的边界位移约束采用左右方向的x约束,后侧采用y约束,下侧采用z约束,前侧和上侧均为自由边界。在钻孔内部分别施加 0、0.3、0.6、0.9 MPa的钻井液压力。地层采用单一粘土地层进行模拟,其具体参数为:重度 1760 N/m3,弹性模量 36 MPa,粘聚力 16.8 kPa,内摩擦角 28.6°,泊松比 0.29,剪胀角 2°,抗拉度 0 MPa,深度 2.2 m。
2.3 模拟结果及分析
通过改变钻孔内钻井液的压力大小,得到了 4种压力下地层沿着垂直方向 (z轴)的变化矢量图,如图 3所示。
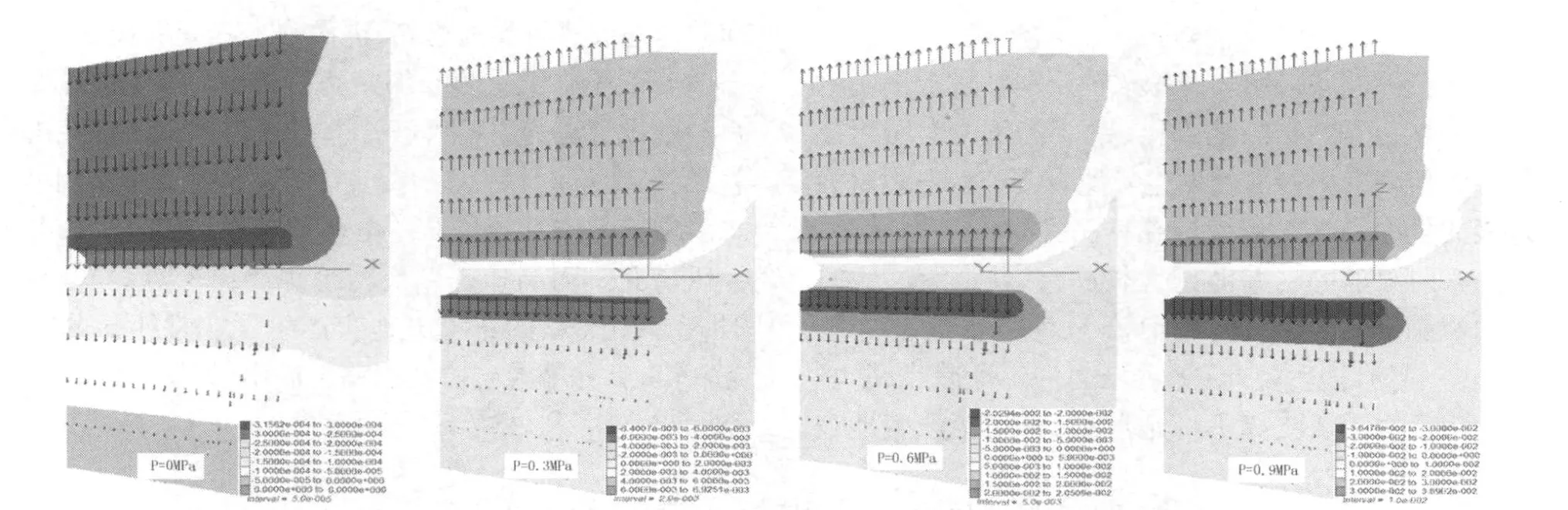
图 3 不同钻井液压力下地层垂直方向位移变化矢量图
当P=0 MPa时,由于钻孔位置地层有效应力的减小,使得地层普遍产生垂直向下的位移,尤其是钻孔壁的上侧位移量最大,达到 3.1 cm左右,地表的沉降在 2.5~3.0 cm之间。
当P=0.3 MPa时,地层位移方向已经发生了改变,表示钻井液产生的压力使得水平孔上部地层产生微小隆起,地表隆起为 4~6 mm。
当P增加至 0.6 MPa和 0.9 MPa时,地表隆起的大小和范围也在不断增大,最大垂直位移达到 2.6 cm左右,此时的钻井液压力也接近了现场采用的压力值。
由此可见,钻井液压力的大小对近地表非开挖具有重要影响,而钻井液的压力往往也同钻井液的其它性能关系密切,如失水量、钻井液组分等,特别是在造浆效果明显的粘土地层,有效控制好钻井液的失水量,减少地层土在钻井液中的混入量可以直接降低局部压力。
3 现场 DCRP检测
3.1 技术原理
DCRP中文一般称之为数字近景摄影测量技术。通过采集实际空间中某一点的不同角度图像信息,利用光线反射相交,进而获得该点实际三维坐标大小,一般应用范围在 300 m之内的空间点检测。
经室内多次对比实验,笔者采用 Canon EOS XSI 55数码相机进行检测点图像的采集。在使用前,需要利用 PM软件对相机参数进行校准,同时将其存贮在软件记忆库之中,便于后续现场数据的处理。
3.2 现场检测
根据水平孔轨迹,在距离出土点 106 m处布置检测点。检测点采用预先制作的黑白标识固定在待检测区域,图像采集过程中,所有的检测点均应保持位置不变,检测点的现场布置如图 4所示。
沿着水平孔轴线方向布置 2条线,每一条线上分布 11个检测点,同时在四周布置 4个控制点,按照标号顺序现场总共布置了 26个检测点。其中,1号点设置为坐标原点,x、y方向如图中所示,z方向垂直纸面向外。在 21和 24号点之间设置距离 1 ft(304.8 mm)。

图 4 现场检测点布置
检测点图像采集过程中,分别对扩孔钻头经过前后的地表各点进行图像采集。每一组分别从 6个不同角度进行拍摄,采集距离以全部检测点落在相机视野范围内为宜,高度根据采集者需要进行调整。根据室内实验结果,现场总共采集了 3组图像信息,后导入 PM软件进行数据处理与分析。
同时,为了检验该技术的检测精度大小,现场还采用了日本产的 AG-1型水准仪进行检测,其检测精度为 0.3 mm。
3.3 检测结果及讨论
经过对 6组采集到的图片分析及水准仪数据计算,得到了扩孔钻头经过前后的地表 z方向位移变化大小。
图 5表示了采用DCRP技术检测变形前后的数据大小。从图中可以发现,从 11号检测点开始出现明显 z方向变形直至 16号检测点结束,其它检测点变化微小。最大位移量位于 13号点,为 28 mm,方向沿 z轴向上,地表的平均隆起量为 8.6 mm。

图 5 DCRP检测结果
图 6表示了两种不同方法对比结果。从图中可以发现,二者对检测点变化趋势的判断是一致的。水准仪检测到的最大位移变化也是位于 13号点,大小为 30 mm,比 DCRP检测结果高 2 mm。平均隆起量为 6.1 mm,比 DCRP检测结果低 2.5 mm。二者最大相差位于 26号点,相差 7.8 mm,平均相差 2.7 mm。由此可见,DCRP检测的精度同水准仪相差不大,完全可以满足现场检测的实际需要。同时,该方法还可以检测 x和 y两个方向值。
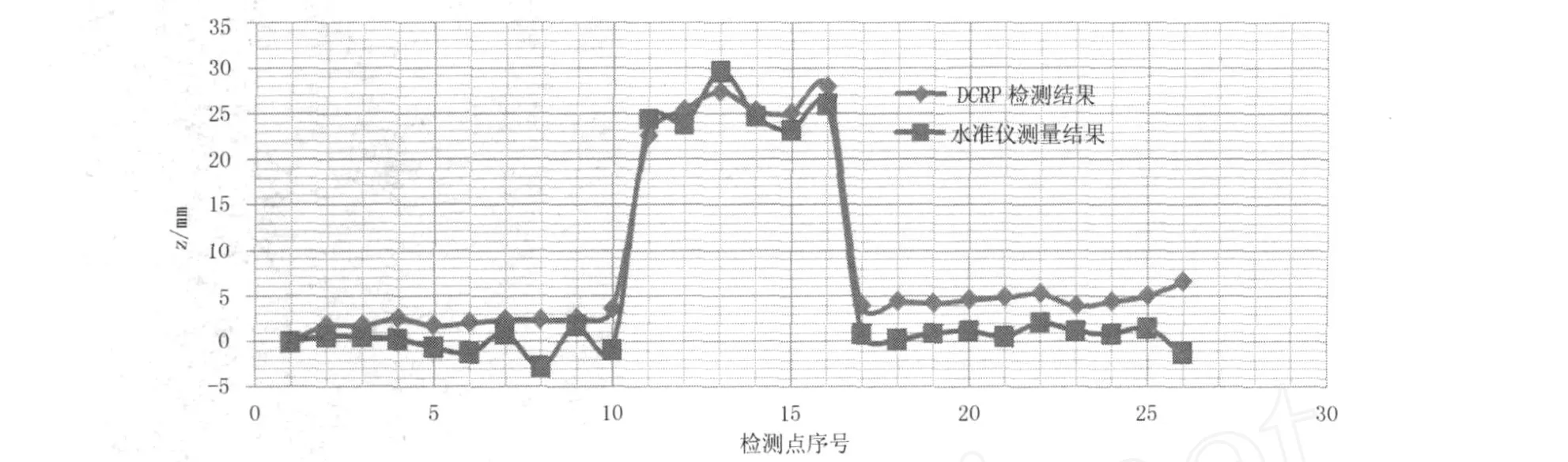
图 6 两种方法对比结果
此外,根据两种现场检测方法的结果,由于钻井液压力作用导致的地表最大隆起量在 28~30 mm之间,而采用数值方法得到的最大值约为 26 mm,比较接近实际检测大小。
尽管水准仪在实际现场测量高程过程中比较常见,但由于其是一种接触式检测方法,因此会受到施工场地、人员操作等限制。表 1显示了两种方法的技术经济指标,相比而言,DCRP技术由于是非接触检测,现场检测时间很短,在本次现场检测中,仅耗费了 5 min左右,而且二者检测精度非常接近,故后者应用前景十分理想。
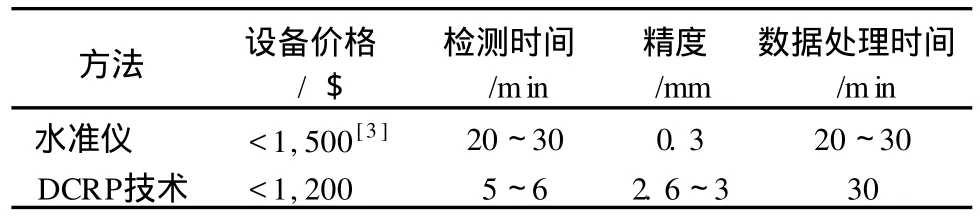
表 1 两种方法对比
4 结论
本文通过对非开挖 HDD现场施工中引起的地表变形进行了数值模拟和现场检测,得到如下结论:(1)按照现场参数建立模型,数值分析得到地表最大隆起量为 26 mm;(2)采用DCRP技术对现场地表变形进行了实地检测,得到最大隆起量为 28 mm;(3)对采用水准仪和采用 DCRP技术两种方法得到的数据进行了对比分析,发现二者平均相差 2.7 mm;(4)对两种方法应用过程中的技术经济指标进行了分析。
[1] 乌效鸣,胡郁乐,李粮纲,等.导向钻进与非开挖铺管技术[M].湖北武汉:中国地质大学出版社,2004.
[2] FLAC,Fast Lagrangian Analysis of Continua,User′s Manual,Itasca Consulting Group Inc.,USA:2004.
[3] Lueke,J.S.,Ariaratnam,S.T.,Banerjee,S.,P.H.Sun.2010 PhotogrammetricMethods For Quality Control Of Trenchless Con2 struction Projects.NASTT 2010 Con.
Research of GroundM ovement based on Numerical S imulation andDCRP Technology in HDD M ethod
SUN Ping2he1,2,WU Xiao2m ing1(1.Faulty of Engineering,ChinaUniversity of Geosciences,Wuhan Hubei 430074,China;2.Ira A Fulton School of Engineering,Arizona State University,Tempe AZ 85282,America)
Due to the complex stratum and drilling fluid pressure,groundmovementoften occurs during the processof hori2 zontal directional drilling.A project inMesa ofAmerica is introduced in this paper.The groundmovement numerical simu2 lation work is based on FLAC3D under different drilling fluid pressure from 0 MPa to 0.9 MPa.The results show that the max distance of z axis is 26 mm.Combined the DCRP technology and leveling method,the author fond that the max dis2 tance of z axis are 28 mm forDCRP and 30 mm for levelingmethod.These results are very near to the simulation results.During the field measurement,26 targetswere fixed on the ground surface.Themax difference betweenDCRP and leveling is 2.7 mm which shows that the accurate is nearly the same.As a non2contactmeasurement,the DCRP technology is not limited by the field cases and the staff level as levelingmethod.
trenchless HDD;ground movement;numerical s imulation;detecting;DCRP technology
P634.7
A
1672-7428(2010)10-0061-04
2010-09-10
国家留学基金委公派资助项目(20093012)
孙平贺 (1982-),男 (汉族),吉林松原人,中国地质大学 (武汉)及美国 Arizona State University联合培养博士,地质工程专业,从事地下水平钻进工程检测模拟的科研工作,湖北省武汉市鲁磨路,pinghesun@163.com。
