连杆转换位置对MCCB操作机构的影响及其优化
2010-11-04良陈德桂刘颖异李兴文纽春萍
季 良陈德桂刘颖异李兴文纽春萍
(1. 西安交通大学电力设备电气绝缘国家重点实验室 西安 710049 2. 北京航空航天大学自动化科学与电气工程学院 北京 100083)
连杆转换位置对MCCB操作机构的影响及其优化
季 良1陈德桂1刘颖异2李兴文1纽春萍1
(1. 西安交通大学电力设备电气绝缘国家重点实验室 西安 710049 2. 北京航空航天大学自动化科学与电气工程学院 北京 100083)
介绍了操作机构打开过程中的连杆转换现象。通过对比转换位置前后连杆的机械性能,研究了连杆转换位置对操作机构性能的影响。根据分析的结果,利用虚拟样机软件ADAMS计算了某塑壳断路器操作机构的最优连杆转换位置,达到了优化机构的目的。经过优化,使机构的打开时间缩短了1ms。通过对优化前后的机构进行实验对比,验证了仿真结果的可信性。分析结果可以为通过优化连杆转换位置提高机构性能提供方法和指导。
操作机构 连杆转换位置 虚拟样机技术 优化
1 引言
操作机构是塑壳断路器(MCCB)的重要组成部分,它的性能直接影响着断路器的开断性能。长期以来,为了提高操作机构的机械性能,许多学者作了大量的研究工作。在文献[1-3]中,虚拟样机技术成为操作机构设计的一种新方法;文献[4]研究了分断弹簧、关键轴位置、杆件质心位置和质量等对操作机构性能的影响,并通过对这些参数的优化设计,提高了机构的打开速度。而文献[5-7]则研究了电动斥力等对操作机构打开速度的影响。实际上,除了文献中介绍的这些影响操作机构性能的因素外,在机构打开过程中存在的连杆转换现象同样对操作机构的性能产生非常重要的影响。关于这方面的研究工作,国内外的文献还十分少见。
连杆转换现象是指操作机构在打开过程的某个位置由五连杆变为四连杆的现象。脱扣器动作后,跳扣运动到某个位置将与其限位轴发生碰撞。碰撞前,机构为五连杆;碰撞后,机构成为四连杆。本文称这一现象为连杆转换现象,而称跳扣与其限位轴的碰撞点为连杆转换位置。由于五连杆与四连杆的自由度等条件的不同,其机械性能存在差异。因此,改变操作机构的连杆转换位置,将对机构的性能产生影响。
本文研究了连杆转换位置对操作机构性能的影响。根据分析的结果,针对某具体塑壳断路器的操作机构,利用虚拟样机软件ADAMS优化计算了其最优的连杆转换位置,达到了优化机构的目的。通过对优化前后的机构进行仿真和实验对比,验证了分析和优化结果的可信性。
2 连杆转换现象
本文的研究对象为某塑壳断路器的操作机构,如图1a所示,图1b为其简化模型。
该操作机构是典型的五连杆机构,它由触头支架f﹑下连杆g﹑上连杆h﹑跳扣k﹑锁扣m﹑操作手柄和分断弹簧等组成。图中机构处于合闸位置。当机构脱扣引起锁扣器m动作时,在分断弹簧的拉力作用下,跳扣k绕O2轴顺时针转动,C点成为活动点,同时连杆g、h脱离死区,带动触头分断。

图1 研究对象Fig.1 Analyzed model
在跳扣k未到达限位轴之前,机构为五连杆,如图2a所示。图中,连杆O2C﹑CB﹑BA﹑AO1和O1O2分别对应实际机构中的跳扣﹑上连杆﹑下连杆﹑触头支架和机构支架;当跳扣旋转到某一位置与其限位轴发生碰撞时,跳扣的运动被限制,连杆O2C不再转动。此后C点成为固定点,连杆O2C和O1O2被等效为O1C,机构变为四连杆(见图2b)。
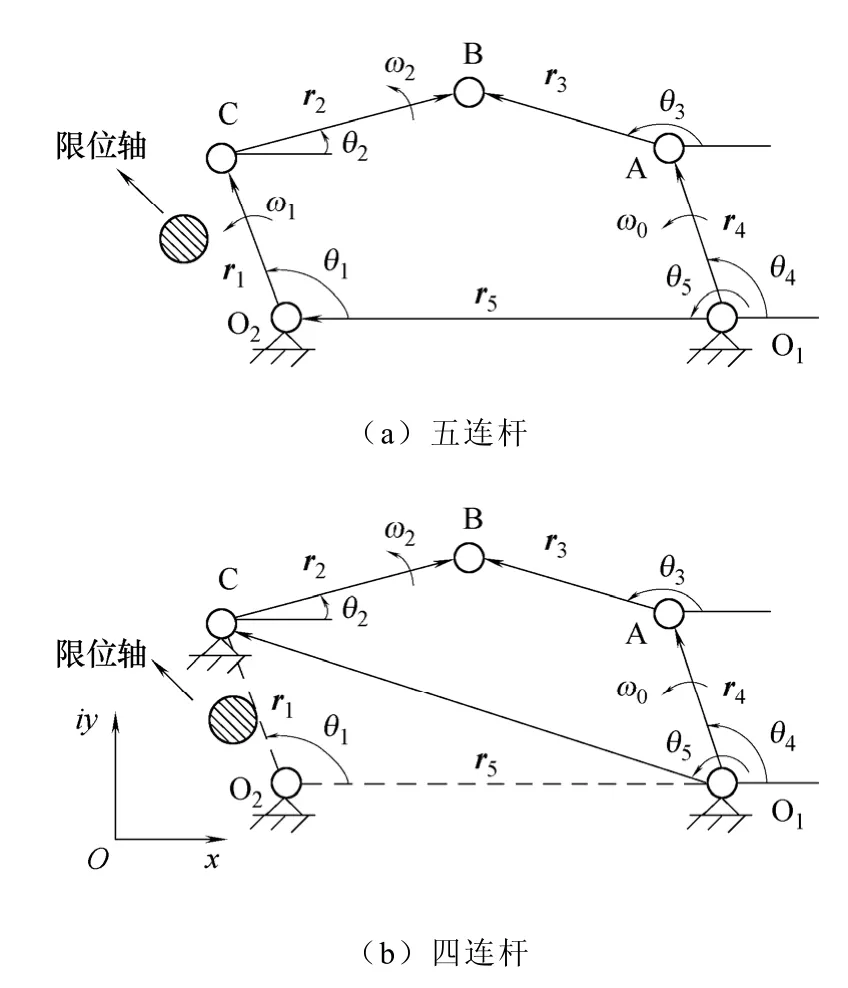
图2 平面连杆机构Fig.2 Plain linkage mechanism
3 连杆转换位置对机构打开速度的影响
从上面的分析过程可以看出:跳扣与其限位轴的碰撞位置实际上就是机构由五连杆变成四连杆的转换位置。改变跳扣与其限位轴的碰撞位置,则机构由五连杆向四连杆的转换位置也跟着变化。由于自由度等条件的不同,四连杆与五连杆有着不同的机械性能。
假设图2中5个连杆的长度分别为r1﹑r2﹑r3﹑r4和r5,它们与x轴正方向的交角分别为θ1﹑θ2﹑θ3﹑θ4和θ5。其中,连杆O2C和CB为驱动杆,其转角轨迹θ1和θ2已知;连杆AO1为从动杆,其转角θ4待求。若以 ri(i=1~5)代表五连杆所构成的五边形矢量图中的各边矢量,则根据矢量运算有

将上式写成指数形式,得到

根据欧拉公式,并注意到θ5=π,有



上式中,输入量为 5个连杆的长度 r1~r5,以及驱动杆AB和BC的转角轨迹θ1﹑θ2。
对于四连杆,θ1为定值,输出转角θ4由θ2唯一决定;而对于五连杆,θ1为一变量,输出转角θ4由θ1﹑θ2共同决定。规定:连杆转换位置用机构由五连杆变为四连杆时跳扣已经转过的角度θcrit表示。则在θcrit之前,机构为五连杆,输出转角θ4是θ1﹑θ2的函数;θcrit之后,机构成为四连杆,θ4是θ2的单值函数,即

式中,f(θ1,θ2)和g(θ2)为根据式(5)演变而来的输出转角的函数表达式。θcrit越大,表示机构的连杆转换位置越靠后,反之则越靠前。
为了分析连杆转换位置对机构性能的影响,文中计算了在两种不同连杆转换位置下的机构输出转角θ4,表1为计算条件。

表1 计算条件Tab.1 Calculation condition
图3为在上述计算条件下,根据式(6)计算得到的机构输出转角。图中,曲线OA对应连杆转换位置为P1(等于5°)时的机构输出转角;曲线OB对应连杆转换位置为P2(等于8°)时的机构输出转角。为了叙述方便,称曲线OA对应的连杆为机构1,而称曲线OB对应的连杆为机构2。机构1在其转换位置P1前为五连杆,P1后成为四连杆;机构2在其转换位置P2前为五连杆,P2后成为四连杆。由于 P2比 P1靠后,因此,机构 2以五连杆形式存在的时间大于机构1的。

图3 连杆转换位置对机构输出转角的影响Fig.3 Influence of linkage-transfer position on the mechanism’s output angle
对比图3中的计算结果可以看出:在P1之前,机构1与机构2同为五连杆,因此输出转角相同;P1之后,机构 1变为四连杆,而机构 2在到达 P2之前仍然为五连杆,因此从P1起,机构2的输出转角大于机构1,即机构2的输出角速度比机构1的大。这说明,机构2以五连杆形式存在的时间增加有利于提高其打开速度。
综上,连杆转换位置通过改变机构在打开过程中以五连杆形式存在的时间可显著影响机构的打开时间。
4 基于连杆转换位置的操作机构优化及实验
在以连杆转换位置作为优化变量的操作机构优化设计中,除了考虑连杆转换位置本身对操作机构的影响外,还应考虑其他因素的制约,例如,自由脱扣状态下的手柄指示位置和手柄再扣行程等。通过人工计算的方法寻找最优的连杆转换位置,使之既满足手柄位置和再扣行程的需要,又使机构打开时间最小化是一件既费时又费力的事情。本文利用ADAMS提供的可视化仿真及综合寻优功能,在满足手柄指示位置和再扣行程的前提下,对图1所示塑壳断路器的操作机构进行优化设计。
4.1 优化对象
通常,为了评价某个操作机构的性能好坏,往往将操作机构的触头支架转角(图 1中的 f)作为输出变量,并作为优化设计中的优化对象。如图 4所示,触头支架的转轴位于O点,A点对应t0时刻触头支架中某点的位置,B点对应t0+Δt时刻该点的新位置。因此,∠AOB就代表Δt时间内触头支架的转角。通过测量∠AOB从最小值(对应机构闭合位置)到最大值(对应机构最大打开位置)所经历的时间,可以得到机构的打开时间。

图4 触头支架转角Fig.4 Rotating angle of the contact support
4.2 优化设计
触头支架的运动规律满足Newton-Euler变分方程
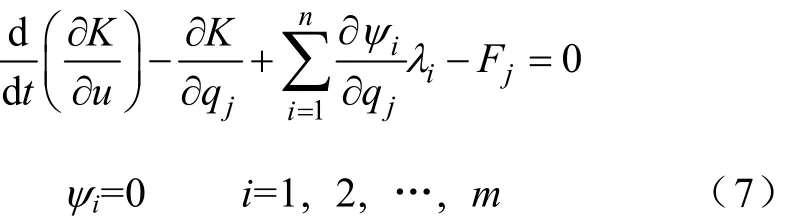
用于定义物体位置和方向的广义坐标;
ψi——运动系统的约束方程;
λi——拉格朗日乘子;
F——作用在物体上的总力。通过在 ADAMS中对方程(7)进行动力学求解,可以得到触头支架的转角曲线。图5为求解得到的原机构触头支架转角。从图中可以看到,原机构的打开时间为6.3ms。

图5 原机构的触头支架转角Fig.5 Rotating angle of the original mechanism’s contact support
优化分析是ADAMS提供的一种复杂的高级分析工具。通常,优化分析问题可以归结为:满足各种约束条件和在指定的优化变量变化范围内,通过自动地选择优化变量,由分析程序求取目标函数的最大或最小值。本文选取优化变量为操作机构的连杆转换位置,并指定其相对于初始值的变化范围为[−3.6°,10.0°],约束条件为手柄位置和再扣行程满足机构设计需要,目标函数为操作机构的触头支架输出转角。图6给出ADAMS优化分析过程中不同连杆转换位置下的触头支架转角。图7为相应的机构打开时间随连杆转换位置的变化情况。
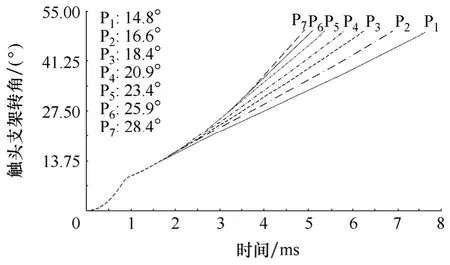
图6 不同连杆转换位置下的触头支架转角Fig.6 Rotating angle of the contact support under different linkage transfer positions

图7 机构打开时间随连杆转换位置的变化Fig.7 Variation of the mechanism’s opening time with linkage transfer position
由图6和图7可知,操作机构的打开时间随着连杆转换位置的靠后而逐步减小。机构原来的连杆转换位置为18.4°,在满足手柄指示位置和再扣行程的条件下,利用ADAMS得到的优化连杆转换位置为 25°。表 2为对优化结果进行统计的情况。可以看到,经过优化,使机构的打开时间由原来的6.3ms缩短到5.3ms,缩短了1ms。
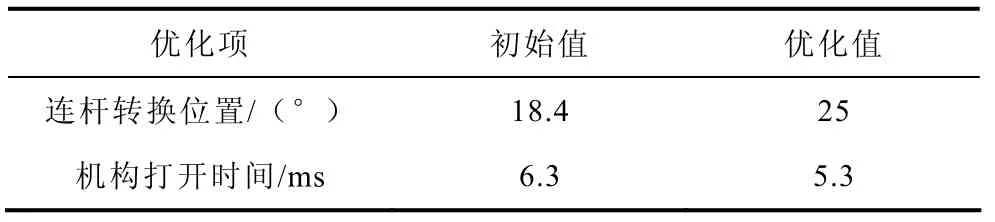
表2 优化结果Tab.2 Optimization result
由于操作机构的打开时间在很大程度上决定了短路开断过程中的电弧电压上升速率和大小,从而影响MCCB的限流性能。因此,通过优化连杆转换位置使操作机构的打开时间减小有利于提高MCCB的限流性能。
4.3 实验验证
为了验证优化结果的可信性,建立了如图8所示的实验线路,用于测量触头支架的转角。实验中,触头支架通过一个刚性连接轴与角位移传感器相连。当触头支架旋转时,电源通过角位移传感器输出一个变化的电压波形,测量电压波形的变化过程即可得到触头支架的角位移曲线。

图8 触头支架转角测量实验线路Fig.8 Experimental circuit for measurement of rotating angle of contact support
图9为实验测得的优化前后机构触头支架的转角曲线。由实验结果可见:优化前机构的打开时间是7.2ms,而仿真得到的机构打开时间为6.3ms。仿真与实验结果存在差异的主要原因是仿真中没有考虑摩擦和阻尼的影响。这里的摩擦主要指旋转构件与其转轴之间相互运动时的摩擦力;而阻尼则主要指具有碰撞关系的两个构件之间发生碰撞时产生的阻挠力。由于考虑摩擦与否并不影响机构优化前后的横向比较,为了简化问题,本文中仿真部分不考虑摩擦和阻尼。

图9 优化前后触头支架转角实验曲线对比Fig.9 Comparison of experimental rotating angle of the contact support before and after optimization
对比优化前后的触头支架实验曲线,发现机构的打开时间由原来的7.2ms缩短到了6.26ms,缩短了0.94ms,而仿真得到的缩短时间为1ms,由此证明了仿真结果是可信的。
5 结论
连杆转换位置对操作机构的性能影响较大,机构的打开速度随着连杆转换位置的靠后而单调提升。但是受限于其他制约因素,连杆转换位置不能任意靠后。本文在考虑这些制约因素的基础上,优化了某具体塑壳断路器的连杆转换位置。通过优化使机构的打开时间缩短了1ms。
[1] 郑建荣. ADAMS-虚拟样机技术入门与提高[M]. 北京: 机械工业出版社, 2002.
[2] 陈德桂. 虚拟样机成为开发新型低压电器的关键技术[J]. 低压电器, 2002(6): 3-7. Chen Degui. Virtual prototype to be a key technique for development of new low voltage electrical apparatus[J]. Low Voltage Apparatus, 2002(6): 3-7.
[3] Chen D G, Ji L, Wang Y F, et al. Analysis and optimization for the operating mechanism of air circuit breaker[J]. IEICE Transactions on Electronics, 2008, 91(8): 1280-1285.
[4] 陈德桂, 刘庆江, 康艳. 塑壳断路器操作机构分断速度的影响因素[J]. 低压电器, 2005(12): 9-12. Chen Degui, Liu Qingjiang, Kang Yan. Effect of different factors to the operating velocity of molded case circuit breakers[J]. Low Voltage Apparatus, 2005(12): 9-12.
[5] 纽春萍, 陈德桂. 电动斥力作用下低压断路器分断特性的研究[J]. 电工技术学报, 2005, 20(7): 34-38. Niu Chunping, Chen Degui. Research on the breaking characteristics of low-voltage circuit breaker with the effect of electrodynamic repulsion force[J]. Transactions of China Electrotechnical Society, 2005, 20(7): 34-38.
[6] Ito S, Kawase Y, Mori H. 3-D finite analysis of repulsion forces on contact system in low voltage circuit breakers[J]. IEEE Transaction on Magnetic, 1996, 32(3): 1677-1680.
[7] 李兴文, 陈德桂, 汪倩, 等. 低压塑壳断路器三相短路开断特性的仿真分析[J]. 电工技术学报, 2005, 20(10): 76-82.Li Xingwen, Chen Degui, Wang Qian, et al. Simulation and analysis of the interruption characteristics of low voltage molded case circuit breakers under 3-phase short circuit[J]. Transactions of China Electrotechnical Society, 2005, 20(10): 76-82.
Analysis and Optimization of Linkage Transfer Position for the Operating Mechanism of MCCB
Ji Liang1Chen Degui1Liu Yingyi2Li Xingwen1Niu Chunping1
(1. Xi’an Jiaotong University Xi’an 710049 China 2. Beihang University Beijing 100083 China)
Linkage transfer phenomenon, which exists in the opening process of the operating mechanism of moulded case circuit breaker (MCCB), is introduced. Influence of the linkage transfer position on the performance of the mechanism is analyzed. According to the analysis result, an optimum design is made for the linkage transfer position of a certain operating mechanism with virtual prototype software ADAMS. Simulation and experimental results show that after optimization the operating time of the mechanism is shortened about 1ms. The analysis result can provide guideline for improving performance of the mechanism by optimizing the linkage transfer position.
Operating mechanism, linkage transfer position, virtual prototype technology, optimization
TM561
季 良 男,1979年生,博士研究生,研究方向为低压电器及开关电弧。
2009-07-27 改稿日期 2010-01-06
陈德桂 男,1933年生,教授,博士生导师,研究方向为新型低压电器的研究和开发等。