基于无速度传感器的并联双感应电机矢量控制仿真研究
2010-10-25吴仲辉年晓红
吴仲辉,年晓红
(中南大学信息科学与工程学院,长沙410075)
基于无速度传感器的并联双感应电机矢量控制仿真研究
吴仲辉,年晓红
(中南大学信息科学与工程学院,长沙410075)
对基于无速度传感器控制技术的单逆变器并联双感应电机矢量控制系统进行了仿真研究,由于自适应伪降阶观测器的极点不依赖于感应电机的转速,将其应用到磁链观测中,有利于提高转速和转矩的响应速度;给出了单逆变器控制并联双感应电机的直接转子磁场定向的矢量控制方案,并推导出旋转坐标系下励磁电流分量和转矩电流分量,构建其仿真模型,并对电机参数和负载不平衡情况进行了仿真分析.仿真结果表明在电机参数和负载不平衡情况下,系统具有良好的动、稳态性能.
自适应伪降阶观测器;并联双感应电机;无速度传感器;矢量控制;直接转子磁场定向
交流牵引电机的控制技术是高速列车牵引传动技术的核心.目前,交流牵引电机普遍采用了磁场定向矢量控制[1-2]或直接转矩控制方法[3-4],充分发挥了交流牵引电机的优越性,同时,不断集成、吸纳现代控制理论和计算机应用领域的新成果,提高了牵引传动控制水平.
通常,磁场定向控制方法主要应用于单台逆变器牵引单台交流牵引电机调速系统,而铁路牵引系统一般采用单逆变器牵引2台或4台交流牵引电机,这样能够减轻牵引传动系统质量,减小体积,降低成本.
目前,国外学者已经提出了针对单逆变器多电机调速系统的矢量控制策略,在这些多电机控制系统中,通常将多台并联的电机等效为1台电机来处理,主要有:一是建立在电机稳态等效电路基础上[5],通过等效定理将多电机模型简化为单电机电路模型;二是对电机内部状态和参数取平均值[6],对每台电机实施矢量控制,然后将用于控制逆变器的电压矢量进行平均来实现控制.
由于牵引电机的转速传感器一般安装在电机的非传动端,增加了电机尺寸和结构复杂性,同时转速传感器工作在高温、振动、电磁干扰、污染等恶劣环境中,影响系统的可靠性.因此,去掉转速传感器对降低传动系统复杂性和成本、提高运用可靠性具有积极的影响[7-14].文献[15-16]将无速度传感器控制技术应用到单逆变器多电机控制系统中,针对并联双电机参数和负载不平衡的情况进行了仿真和实验研究.
文献[11]提出一种自适应伪降阶转子磁链观测器,观测器极点不依赖于电机转速,与全阶自适应相比,辨识参数消耗的计算时间短,速度响应好.为了进一步提高系统响应速度,实现转速和转矩的实时辨识,本文将自适应伪降阶磁链观测器估计转子磁链应用到并联双感应电机系统中,给出了单逆变器控制并联双感应电机的直接转子磁场定向的矢量控制方案,并推导出旋转坐标系下励磁电流分量和转矩电流分量,构建其仿真模型,并对电机参数和负载不平衡情况进行了仿真分析.
1 自适应伪降阶磁链观测器
在两相静止参考坐标系中,感应电机的状态方程表述如下[12]:

式中:
is=[isα,isβ]T,表示定子电流;Φr=[Φrα,Φrβ]T,表示转子磁链;us=[usα,usβ]T,表示定子电压;

Rs、Rr分别表示定子、转子电阻;
Ls、Lr分别表示定子、转子自感;
Lm表示互感;
σ表示漏感系数;
τr表示转子时间常数;
ωr表示转子角频率.
本文采用自适应伪降阶磁链观测器估计转子磁链,运用间接磁场定向方法.自适应伪降阶转子磁链观测器的方程描述如下[11]:

该观测器同时估计定子电流和转子磁链,式中“∧”表示估计值,G是自适应伪降阶观测器增益矩阵,其形式如下[11]:
增益矩阵 G通过极点配置得到,其中:
g1=(k1-1)ar11,k1为任意正常数;
g2=k2,为任意常数.
感应电机的转子速度通过Lyapunov稳定性理论推导出自适应率,于是得到辨识速度为:

式中:eis=is-^is,为定子电流误差;^Φr为估计转子磁链;KP1和 KI1为任意正常数.
2 并联感应电机的电流模型
图1表示并联双感应电机的电流模型框图.从逆变器流出的电流is分为2部分:is1流入感应电机1,is2流入感应电机.¯is是定子电流 is1和 is2的平均值 ,Δ¯is是定子电流 is1和is2的差值,表述如下[15]:

当2个感应电机的负载不平衡时,定子电流is1与is2不相等,由于¯is是逆变器输出电流is的一半,因此可以作为逆变器的控制量.

图1 并联双感应电机的电流模型框图
3 并联双感应电机的转子磁链模型
在同步旋转d-q参考坐标系下,感应电机的转子磁链方程为[15]:

式 中:ies= [isdisq]T, 为 定 子 电 流;ψr=[ψrdψrq]T,为转子磁链,;ω为同步角频率.
感应电机1和2的转子磁链方程均用方程(8)表示如下:

联立方程(9)和(10),得到如下方程:

式中:


如果2台电机的参数和转子速度相同,则方程(11)与(8)一致,此时,2台电机可以作为单电机处理.
4 并联双感应电机的转矩模型

式中:p表示极对数.
将方程(12)分别应用到电机1和电机2,类似于并联双感应电机的转子磁链模型的推导,可以得到如下方程:在旋转参考坐标系中,感应电机的转矩表示如下:


当2台感应电机的参数相同时,T1是T¯e的函数,方程(13)与(12)具有相同的形式.因此,2台电机可以作为1台电机的情况处理.
5 并联双感应电机的矢量控制策略
在旋转坐标系下并联双感应电机的矢量图图2所示.ψr1和ψr2表示感应电机的转子磁链,¯ψr表示2台感应电机转子磁链的平均值,Δ¯ψr表示2台感应电机转子磁链差值的一半.

图2 双感应电机的矢量图
根据转子磁场定向控制原理,在同步旋转坐标系中选取平均磁链ψ¯r的方向与d轴正方向一致.
在方程(11)中,将ψ¯r和¯ies分解成d轴和q轴分量,表示如下:

由于平均转子磁链恒定,dψ¯rd/d t为零,又ψ¯r与d轴方向一致,因此ψ¯s=ψ¯rd,ψ¯rq=0,方程(15)表示为:

从上式可以得到控制平均转子磁链的参考电流¯ie*sd如下:

将方程(13)中ψ¯r和¯ise分解成d轴和q轴分量,表示如下:

由于ψ¯r与d轴方向一致,则ψ¯r=ψ¯rd,ψ¯rq=0,得到:

从上式可以得到控制平均转矩的参考电流如下:

式中“:*”表示参考值“;∧”表示估计值.
根据直接转子磁链定向,可以得到:
式中:Φ¯αr和Φ¯βr是在静止两相参考坐标系中并联双感应电机的估计平均转子磁链.
6 系统结构框图
图3所示为并联双感应电机矢量控制系统框图.本系统采用直接磁场定向控制,矢量变换由公式(20)和(21)得到,单电机的辨识转速由公式(5)得到,单电机的辨识转子磁链由公式(4)得到.

图3 系统框图
7 仿真结果
并联双感应电机的参数如下:
电机1:PN=37.3 kW,Pn=4,Rs=0.087Ω,Rs=0.228Ω,LS=0.0355 H,Lr=0.0355H,Lm=0.0347 H,Rated voltage=460 V,Rated frequency=50 Hz,Inetia=1.662.
电机2:PN=18.7 kW,Pn=4,Rs=0.1305Ω,Rs=0.342Ω,LS=0.053 25 H,Lr=0.053 25H,Lm=0.052 05 H,Rated voltage=460 V,Rated frequency=50 Hz,Inetia=1.662.
(1)2台感应电机的参数相同,如电机2参数所示.
2台感应电机负载转矩均为空载,在2 s后电机的参考速度从800 r/min跳变到1 000 r/min.本文所采用的方法辨识的负载转矩和速度响应曲线如图4所示.

图4 空载时转速跃变的速度和转矩响应曲线
设定电机的参考速度值为1 000r/min,开始时2台感应电机空载运行,1 s后电机1的负载转矩跳变到100 Nm,2.5 s后电机2的负载转矩跳变到100 Nm.本文所采用方法辨识的转矩和速度响应曲线如图5所示.
仿真结果表明,当2台并联感应电机的参数相同时,在电机转速和转矩跃变的情况下,辨识的转速和转矩分别完全趋于一致,系统具有良好的动静态性能.
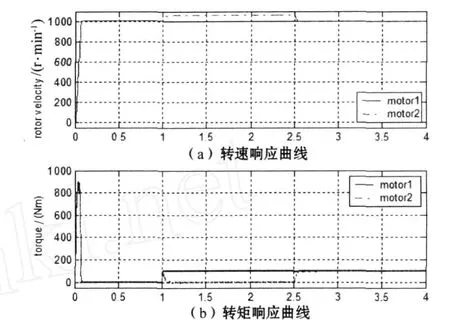
图5 不平衡负载时的转速响应曲线和转矩响应曲线
(2)2台感应电机的参数不同
2台感应电机负载转矩均为空载,在2 s后电机的参考速度从800 r/min跳变到1 000 r/min.本文所采用的方法辨识的负载转矩和速度响应曲线如图6所示.
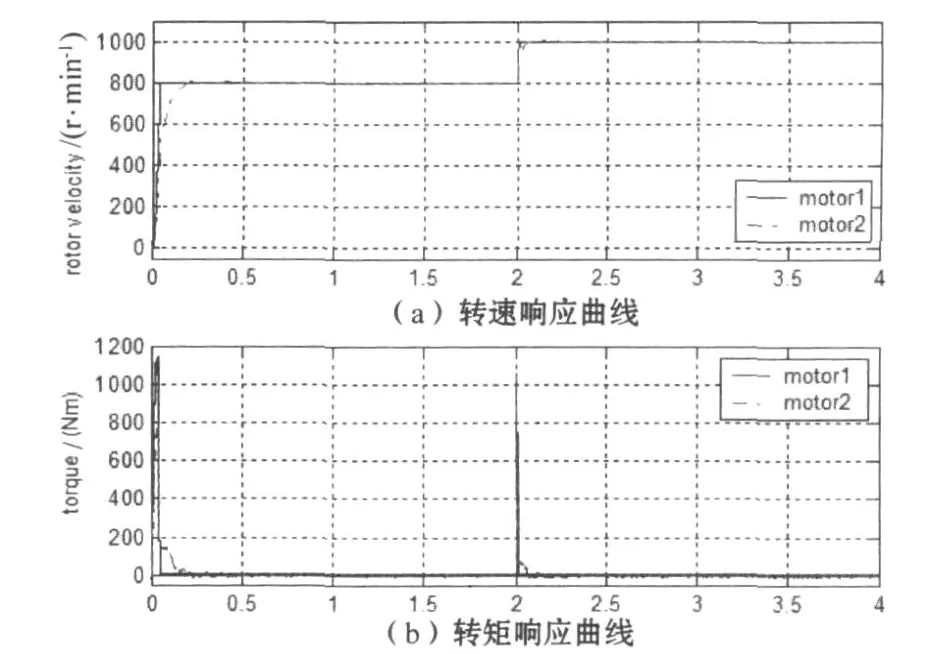
图6 空载时转速跃变的速度和转矩响应曲线
设定电机的参考速度值为1 000 r/min,开始时两台感应电机空载运行,1 s后电机1的负载转矩跳变到100 Nm,2.5 s后电机2的负载转矩跳变到100 Nm,本文所采用方法辨识的转矩和速度响应曲线如图7所示.

图7 不平衡负载时的转速响应曲线和转矩响应曲线
仿真结果表明,当2台感应电机参数不同时,在转速跃变和不平衡负载情况下,并联双感应电机能很好地辨识电机的转速和转矩,由于参数的不同,最终2台感应电机辨识的速度不能完全一致,但系统能够快速稳定,并具有良好的动稳态性能.
8 结 语
本文将自适应伪降阶磁链观测器估计转子磁链应用到并联双感应电机系统中,给出了单逆变器控制并联双感应电机的直接转子磁场定向的矢量控制方案,并推导出旋转坐标系下励磁电流分量和转矩电流分量,构建其仿真模型,并对电机参数和负载不平衡情况进行了仿真分析.仿真结果表明,在本文的方案中并联双感应电机的转速和转矩响应快且比较平稳,系统具有良好的动、稳态性能.
[1] Blaschke F.A New Method fo r the Structural Decoup ling of A.C.Induction Machines[J].Conf.Rec.IFAC,1971(1):1-15.
[2] Kubo ta H,M atsuse K,Nakano T.DSP-based Speed Adap tive Observer of Induction Moto r[J].IEEE Trans.Ind.App licat.,1993,29:344-348.
[3] Takahashi I,Ohmori Y.High-performance Direct Torque Control of an Induction Moto r[J].IEEE Trans.Ind.App licat.,1989,25:257-264.
[4] Depenbrock M.Direct Self-control(DSC)of Inverter-fed Induction Machine[J].IEEE Trans.Power Electron.,1988(3):420-429.
[5] Matsumoto Y,Eguchi N,Kawamura A.A Novel Vector Control of Single-inverter M ultip le-motors D rives for Sinkansen Traction System[J].in Conf.Rec.IEEE APEC,2001(1):608-614.
[6] Kelecy PM,Lorenz RD.Control Methodology for Single Inverter Parallel Connected Dual Induction Motor D rives fo r Electric Vehicles[J].in Proc.IEEE PESC,1994(94):987-991.
[7] Yuki K,Kondo K.Development of High Performance Traction Drive System without Speed Sensors[J].IPEC-Tokyo,2000(1):1373-1378.
[8] Steimel A.Direct Self-Control and Synchronous Pulse Techniques for High-Power Traction Inverters in Comparison[J].IEEE Trans.Ind.Electron,2004,4(51):810-820.
[9] Schauder C.Adap tive Speed Identification for Vector Control of Induction Moto rs Without Rotational Transducers[J].IEEE Trans.Ind.App licat.,1992,28:1054-1061.
[10] Nian Xiaohong,Wang Jian.An Adap tive Observer for Speed Sensorless Control of Induction Motors[C]//.IAS:Proceedings of the 2006 IEEE Annual Meeting of Industrial App lication,2006.
[11] Lin Y N,Chen C L.Adap tive Pseudoreduced-Order Flux Observer for Speed Sensorless Field-O riented Control of IM[J].IEEE Trans.Ind.Electron,1999,46(5):1042-1045.
[12] Kubota H,Matsuse K,Nakano T.DSP-based Speed Adap tive Observer of Induction Motor[J].IEEE Trans.Ind.App licat.,1993,29:344 348.
[13] Yang G,Chin T H.Adap tive-speed Identification Scheme for a Vecto r-controlled Speed Senso rless Inverter-induction Motor D rive[J].IEEE Trans.Ind.App lications,1993,29(4):820-825.
[14] Hinkkanen M,Luomi J.Parameter Sensitivity of Full-order Flux Observers fo r Induction Moto rs[J].IEEE Trans.Ind.App licat,2003,39(4):1127-1135.
[15] Matsuse K,Kouno Y,Kawai H,et al.A Speed-senso rless Vecto r Control Method of Parallel-connected Dual Induction Moto r fed by a Single Inverter[J].IEEE Trans.Ind.App licat.,2002,38:1566-1571.
[16] Matsuse Hirotoshi K,Kouno Jun Oikawa K Y.Characteristics of Speed Sensor-less Vector Controlled Dual Induction Motor D rive Connected in Parallel Fed by a Single Inverter[J].IEEE Trans on Industry App licat,2004,40(1):153-161.
Vector Control Simulation Research of Parallel-Connected Dual Induction Motor Based on Speed Sensorless
WU Zhong-hui,N IAN Xiao-hong
(Central South University,Changsha 410075,China)
This paper researches on vecto r control system of paralled-connected dual induction moto r fed by single inverter based on speed sensorless.In order to imp rove response time of the rotor velocity and the to rque,a adap tive p seudo-reduced observer is app lied to estimate the roto r flux,because the polars of the observer is independent on the rotor speed of the induction motor.The scheme of vector control of direct field orientation of paralled-connected dual induction mo to r fed by single inverter is p roposed.In themeantime,themagnetized current component and the torque current component are deduced.On the condition of unbalanced load torque and differentmotor parameter,the simulation model is established and analyzed.The results show that on the condition of unbalanced load to rque and differentmotor parameter,the system has good dynamic and stable performance.
adap tive pseudo-reduced observer;paralled-connected dual induction motor;speed sensorless;vecto r control;direct field orientation
U 264.1
A DO I:10.3969/j.issn.1671-6906.2010.02.003
1671-6906(2010)02-0008-06
2010-03-09
国家自然科学基金项目(60774045)
吴仲辉(1985-),男,湖南益阳人,硕士.
