Lyapunov指数在微弱信号检测中的应用
2010-10-16刘道文冯浩
刘道文,冯浩
(许昌学院教育技术与信息部,河南许昌461000)
利用Duffing混沌振子对系统参数极其敏感而对噪声免疫的特性,可以检测出引入系统的待测微弱周期信号[1],其实质就是利用待测微弱周期信号实现混沌控制,使系统的输出状态发生跃变。微弱的周期信号可以使处于大尺度周期临界状态的检测系统的相空间状态由混沌状态向大尺度周期状态跃变,从而检测出微弱信号的存在,这是当前基于混沌理论检测微弱信号的主要依据,因此,基于混沌理论微弱信号检测的一个关键的内容就是判定系统是处于混沌状态还是大尺度周期状态。当前,判定动力系统的状态主要通过直观观察相图、Melnikov解析计算等方法。直观观察相图法可以简单、方便的判定系统的状态,但该方法因缺乏严密理论判据而存在一定的主观性;Melnikov法能计算出系统进入混沌状态的阀值,但无法准确地计算出系统进入大尺度周期状态的阀值,文献[2] 利用Melnikov法计算出系统进入混沌状态的阀值后,通过实验法确定系统进入大尺度状态的阀值。
Lyapunov特性指数是衡量系统动力学特性的一个重要定量指标,它表明系统在相空间中相邻轨道收敛或发散的平均指数率,是判断和描述非线性时间序列是否为混沌系统的重要参数,是区分系统处于混沌状态或非混沌状态的最直接的特征量之一[3]。本文提出通过Lyapunov指数定量地描述检测系统由混沌状态向大尺度周期状态的变化,为检测出待测微弱周期信号提供可靠的依据。
1 系统状态判定方法
噪声背景中的微弱周期信号会使系统状态由混沌态向大尺度周期外轨转换发生相变,这是当前混沌检测的主要依据,也被认为是根据参数敏感性进行检测,其原理方程就是Holmes型Duffing方程[4]

式中k—阻尼比;fr—周期策动力。

通过分析Duffing系统的Lyapunov指数,可以清楚的判断混沌检测系统瞬间动力学运动状态,从而确定待测信号的存在,以及较为准确地找到系统状态转变与待测信号幅值参数的关系。

表1 Lyapunov指数与系统状态Tab.1 Lyapunov exponent and the system's state
2 Lyapunov指数算法
2.1 Jocobian法
目前计算Lyapunov指数的数值方法除了定义法外,大体上分为两大类:Wolf法和Jocobian法。Jocobian法适用于噪声较大的系统,切空间中小向量的演变接近线性[8],是一种在实际应用中发展起来的计算Lyapunov指数的方法。
考虑下面的微分方程系统


这里J是F的Jocobian矩阵。对于三维连续动力系统[6]
的Jocobian矩阵为

式(3)的解能够表示为

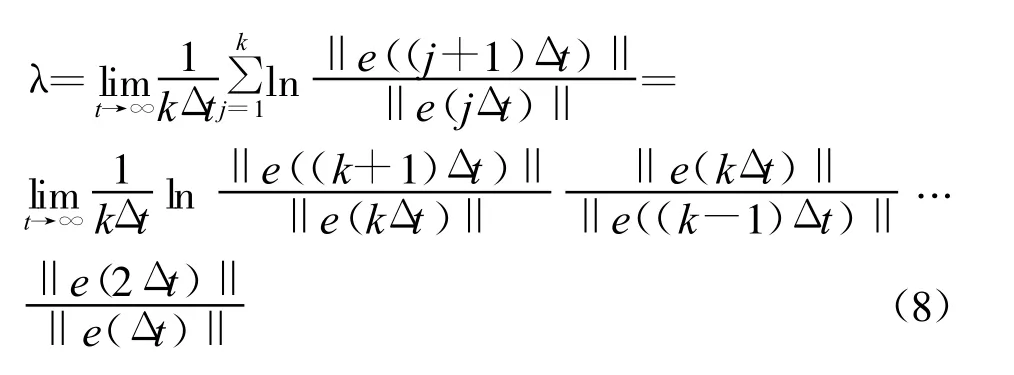
其中U:e(0)→e(t)是线性算子映射。这个映射U的渐近行为可用指数刻画为

所以,由式(2)构成的系统的Lyapunov指数可以描述为上述重复过程的平均数[7]。
美的以赊销或分期收款方式进行结算,纳税义务时间就是合同约定的收款日期。公司可以对短时间内无法收回的货款采取这样的结算方式,从而延期确认收入,减少当期应缴纳的所得税。以美的2017年7月发生的销售业务为例,当期销售了价值600万元的商品,假如合同约定付款期限为一年,每季度初支付150万元,则该笔业务在2017年应确认的收入为300万元,相应的应纳税额为75万元。与直接收款的方式相比,采取赊销或分期收款方式,美的可以递延缴纳的税额为75万元,可以利用这笔资金为企业创造更多的收益。
2.2 Duffing系统的Lyapunov指数
对于由式(1)构成的正弦信号检测系统,用 x+δ x和x表示初始位置不同的两点,δ x为两点的偏差,将 x+δ x和x分别代入式(1),并相减可以得到如下的偏差方程

式中 c(t)=3x2-5x4。
将式(9)改写成状态方程的形式,令 δ x=δ y,则有

将式(10)写成矢量微分方程形式


因为X(t)为周期函数,所以H(t)是连续的周期性的2×2阶实矩阵,其最小周期T=2π,有下式成立

因为H(t)为周期矩阵,所以式(11)为一周期系数线性微分方程。为求出Duffing系统的Lyapunov指数,需要将式(11)转化为自治系统。
由周期系数线性微分方程理论,设D(t)为式(11)的基本解矩阵,则D(t+T)也是基本解矩阵。因为存在常数矩阵C,使得D(t+T)=D(t)C
当 t=0时,D(0)=I,从而有

又因为D(T)是非退化的,所以存在一个用 lnD(T)表示的矩阵,使得elnD(T)=D(T)。
所以,式(11)的标准基本解矩阵可表示为

其中F(t)是一个非退化的周期矩阵。

对式(11)做线性变换

则周期系统式(11)、式(12)变成自治系统

设矩阵D(T)的两个特征根为 λ1和 λ2,则两个Lyapunov指数可表示为

由以上分析可知,可以通过求解D(T)的特征根即可得到式(11)的Lyapunov指数[9]。
3 仿真分析
3.1 临界状态仿真
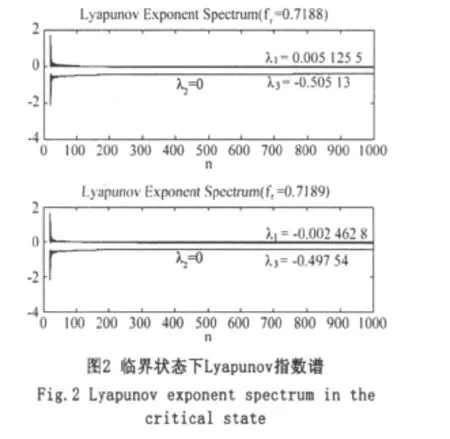
本文将Duffing混沌检测系统构造成三维系统,系统Lyapunov指数计算时间步长设置为0.01,每次演化的步骤为10,绘制Lyapunov指数谱时,摈弃了前200次不稳定的迭代。指数谱中均存在一定的过渡区域[10],此区域中的Lyapunov指数取值的正负变化呈现不稳定的状态,为了能够应用Lyapunov指数准确地判断系统的状态,最好选取指数谱中稳定的Lyapunov指数值,本文中选取 n=900点处的Lyapunov指数值。图2显示了检测系统由混沌状态向大尺度周期状态跃变时Lyapunov指数谱变化情况。当系统的内置驱动信号幅值fr=0.718 8时,λ1>0,系统处于混沌状态。当fr=0.718 9时,λ1<0,λ3<0,系统处于大尺度周期状态。由此可知,fr=0.718 8是系统由混沌状态向大尺度周期状态转变的分叉阀值。
3.2 瞬态仿真
由式(1)构成的Duffing混沌检测系统,设初值x(0)=1,x′(0)=1,积分时间间隔为 h=0.01,用四阶Runge-Kutta积分方程,去除前200次不稳定的迭代。fr的取值的初始值为0.68,终止值为0.76,步长为 0.001,混沌检测系统各个瞬态的Lyapunov指数如图3所示。从图3可以看出,Duffing混沌检测系统的Lyapunov指数随fr变化呈对称分布,对称轴为 a=(λ1+λ3)/2=-0.25,而对称位置源于式(1)中的K=0.5,其物理机制可能源于该混沌检测系统的固有性质[9];Lyapunov指数数值符号的变化可以方便地判断出系统所处的状态,同样可以精确的计算出临界状态的系统内置驱动信号的幅值。所以,利用Lyapunov指数可以很准确的判断混沌检测系统的状态,从而提高了利用Duffing混沌检测系统检测微弱周期信号的准确性与可靠性。

4 结论
利用Lyapunov指数定量分析混沌检测系统的动力学特性,可准确地判定检测系统的瞬间状态和系统相变的阀值,而且通过不断的提高fr的精度能够更加准确地判定系统状态。利用Lyapunov指数判定Duffing混沌检测系统状态,在很大程度上克服了直观判定相变方法所具有的主观性,提高了利用Duffing混沌检测系统检测微弱信号的可靠性。但Lyapunov指数谱具有一定的过渡区域,在此区域内Lyapunov指数取值的正负变化不稳定,一般选取稳定区间的Lyapunov指数值来作为判定系统状态的指标。
[1] 周玲,田建生,刘铁军.Duffing混沌振子用于微弱信号检测的研究[J] .系统工程与电子技术,2006,28(10):1477-1479.
[2] 李月,杨宝俊,石要武.色噪声背景下微弱正弦信号的混沌检测[J] .物理学报,2003,52(3):1956-1959.
[3] 崔芹.基于混沌理论微弱信号检测[D] .哈尔滨:哈尔滨工程大学,2008.
[4] 李月,杨宝俊,林红波,等.基于特定混沌系统微弱谐波信号频率检测的理论分析与仿真[J] .物理学报,2005,54(5):1995-1998.
[5] 谢涛,魏学业.混沌振子在微弱信号检测中的可靠性研究[J] .仪器仪表学报,2005,29(6):1265.
[6] 庄艳丽.基于混沌振子的微弱信号检测方法研究[D] .成都:成都电子科技大学,2006.
[7] 吕金虎,陆安君.混沌时间序列分析及应用[M] .武汉:武汉大学出版社,2005.
[8] BARANA G,TSUDA I.A new method for computing Lyapunov exponents[J] .Phys.,Lett.,A,1993,175(6):421-427.
[9] 李月,杨宝俊.混沌振子检测引论[M] .北京:电子工业出版社,2004.
[10] 杨红英,叶昊,王桂增,等.Duffing振子的Lyapunov指数与Floquet指数研究[J] .仪器仪表学报,2008,29(5):927-931.
