一种三维力反馈手控器*
2010-10-08吴剑锋宋爱国李建清
吴剑锋,宋爱国,李建清
(东南大学仪器科学与工程学院,南京210096)
在人与周围的世界相互作用中,触觉是仅次于视觉的重要的感觉,其中力触觉是可以通过关节和肌肉得到的运动知觉,这种知觉能提供力、速度、位移等信息。力触觉在现实中运用非常广泛,在医疗、商业、教育、娱乐、军事方面都可以有相当大的运用前景。力触觉感知装置能与视觉显示设备相配合,构建力觉感知虚拟环境交互仿真实验平台,为人类提供力触觉感知训练,也可以与远程装置相配合,帮助人类实现远程未知环境的有效感知。因此对力触觉感知装置的研究非常有必要。
目前,国内外对触觉感知装置的研究已取得一定的进展。现有的触觉感知装置主要有阵列式形状触觉感知装置[1-2]、气囊式柔性触觉感知装置[3]、电刺激式触觉感知装置[4],它们主要是接触状态和物体形状的感知装置,功能都较为单一。手控器作为人机交互的关键设备而被广泛研究[5-12],其可以模拟与从机械手相作用的真实世界的一些力学特性,如重量、硬度、纹理、柔顺性等,因此手控器对复合触觉感知装置的研制具有重要的意义[13~16]。
本文设计了一种具有USB接口的三维力反馈手控器,可实现物体形状触觉和柔性触觉感知再现,为触觉感知装置提供一种新的解决方案。
1 三维力反馈手控器硬件设计
三维力反馈手控器示意图如图1所示。三维力反馈手控器由操作手柄、XYZ三轴机械机构、直流伺服电机及其光电编码器、控制箱、支架和配重块共同组成。手柄用于操作,三轴机械机构用以实现三维运动,电机用来控制力矩输出,光电编码器实现运行信息测量,控制箱内有电源、测控电路等,支架用于支撑整个机械结构,配重块用于保持机械结构的平衡。
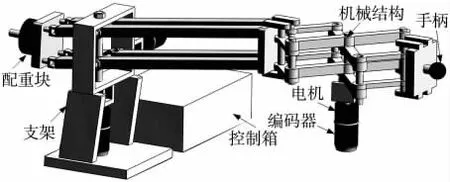
图1 三维力反馈手控器示意图
图2所示为三维力反馈手控器的硬件电路框图,图中只显示了X轴方向上的电路,其它方向上采用了同样的控制原理。
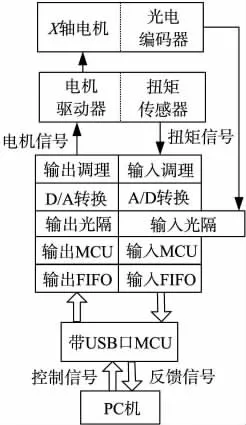
图2 三维力反馈手控器的硬件电路框图
手控器采用了瑞典Maxon公司的电机及其配套的光电编码器,手控器通过电机编码器获取人手运动产生的三维编码信息,从而可以得到人手的位置信息,通过处理可以得到相应运动的速度和加速度。光电编码器通过A、A、B、B差动编码信号输出来标识电机旋转的方向和角度,有了差动信号可以在一定程度上避免码盘边缘抖动导致的干扰,我们采用75LBC175接收芯片将差动信号A、A、B、B转换为A、B两路信号,采用单片机对两路信号的相位进行计数得到光电编码器的状态。
表1列出了各种状态下的计数动作。当AB线上的状态发生改变时进行计数,用A'B'表示变化前的原始信号状态,AB表示当前的信号状态,方向标志表示码盘的转向,计数用+-符号表示加减。采用的计数方法仅在AB线上有状态变化时计数,通过分析编码信号的状态可知,仅处理表1中的无阴影部分就可以得到所需要的结果。为了标识手控器的原始位置,系统设计了一个归零按键,当按键按下时所有计数值归零,并以当前状态开始计数。
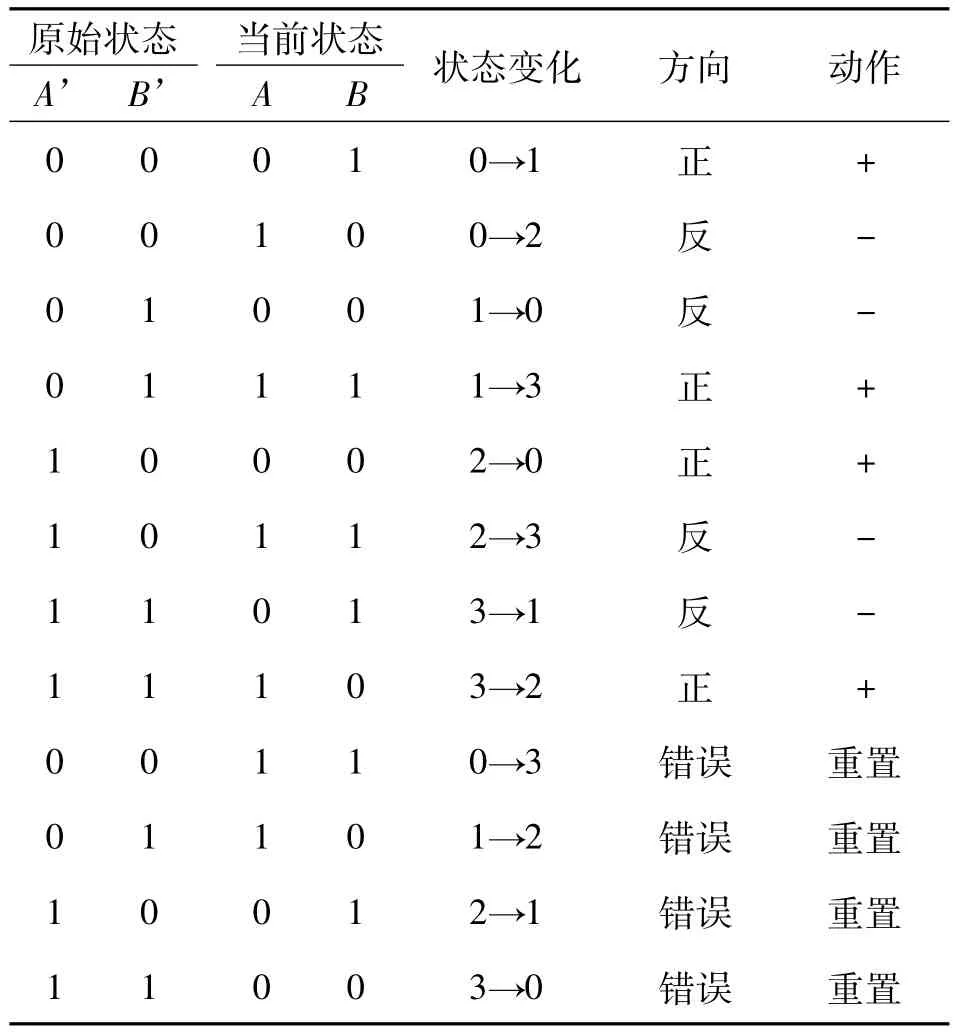
表1 光电编码单片机计数方法表
通过电机驱动器控制手控器的三维输出,无阻力时可以控制运动速度和加速度,在电机堵转时可以等效为控制输出力矩,需要注意的是电机堵转时间不能太长,过长时间的堵转可能导致电机损坏。为实现反馈控制,需要检测每个电机的工作电流。为了保证高速采集的同步和完整性,手控器控制电路采用2片MCP3204作为模拟数字转换芯片,其具有12 bit AD转换精度,100 ksps的转换速率,从而能保证每个通道10 ksps以上的转换速率。采用了2片MCP3204可以同时进行两路模拟数字转换和读取,从而提高转换部分的最大转换速率和减少MCU的串行读取时间。
采用TLV5630作为数字模拟转换的芯片,其具有12 bit DA转换精度数,最快建立时间小于1 μs,而且通过其LDAC引脚可以实现各路数字模拟转换的同步输出。
在为保证系统可靠性,对输入输出数字信号进行了光电隔离。由于串行口上下行数据带宽有限,特别是现有新型计算机笔记本计算机大多不带有串口,采用USB接口可以方便通用计算机控制,同时可极大提高数据通讯速率。所以为保证PC机上下行控制信号的实时性,采用一片自带USB接口的C8051F340负责将编码和反馈信息通过USB接口连接到PC,同时接收PC机下传的输出控制信息,用一个输出51单片机专门负责模拟量的模数转换和编码器的编码采集控制,另用一个输入51单片机负责多路数字模拟量转换输出,在两个单片机与C8051F340间分别采用上、下行FIFO作输入输出缓冲。为保证手控器功能的可扩展性,总共设计了八路控制通道,每路都具有一个数字模拟转换通道、一个模拟数字转换通道和一个电机编码通道,对应所设计的力反馈手控器的三个方向只采用了三路控制通道。为了验证手控器的触觉感知再现功能,本文设计了基于手控器的虚拟环境有限空间弹性球运动实验
2 虚拟环境有限空间弹性球运动实验
该实验模拟一个弹性球在有限刚性空间内运动的受力情况,弹性球的模型如如图3(a)所示。当球体位于空腔内时,球体不受任何力的约束而自由运动,在手控器上的无反馈力作用;当球体与腔体内表面接触,而继续向腔体内表面运动时,球体受腔体表面的支持力作用,自身发生变形,此时在手控器上反馈力的大小符合式(1),人手通过手控器能感受到腔体内表面对球体作用力的大小和方向如图3(b)所示。虚拟环境采用OPENGL完成,操作人员可在虚拟环境中通过手控器控制弹性球运动,通过手控器上的反馈力知道墙体对球体作用力的大小和分析,通过视觉知道球体的当前所处位置。

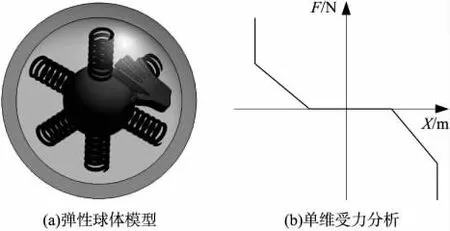
图3 虚拟环境有限空间弹性球运动模型及受力分析图
图4为虚拟环境仿真实验图,当弹性球体处于三维空间的右后方时,受到后侧墙壁和地面的力作用,而在水平方向则没有力的作用。
如对该模型进行简单变换可模拟刚体球在有限弹性壁空腔运动,此时刚体球可视一个刚体,受力无形变,而空腔的弹性壁受到刚性球的挤压发生变形产生支持力。
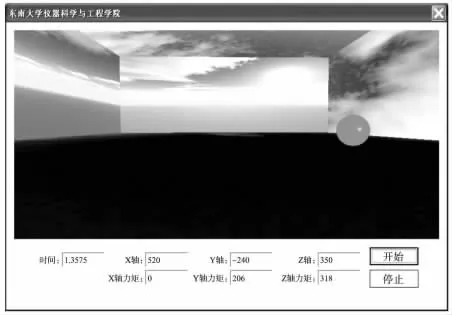
图4 虚拟环境仿真实验图
3 系统实现
三维力反馈手控器样机整体图如图5所示,操作人员通过手控器的把手操作。经江苏省计量院测试表明:所设计的三维力反馈手控器样机力反馈至少能达到20 N,位移范围大于150 mm×150 mm×150 mm,具有形状触觉再现、纹理触觉再现、柔性力触觉再现三种功能。

图5 完成系统图
4 结束语
介绍了一种具有USB接口的手控器控制电路的解决方案,通过电机驱动器控三维制手控器的输出,用电机编码器获取人手的三维运动编码信息,采用USB接口以方便上下行控制数据的通信。测试及试验结果表明,所设计的手控器能满足力触觉再现的需要,性能良好。
[1]Bliss J C,Katcher M H,Rogers C H,et al.Optical-to-tactile Image Conversion for the Blind[J].IEEE Trans.Man-Machine Systems,1970,11(1):58-65.
[2]Minagawa H,Ohnishi N,Sugie N.Tactile-Audio Diagram for Blind Persons[J].IEEE Trans.on Rehabilitation Engineering,1996,4:431-437.
[3]Hiroyuki Shinoda,Naoya Asamura,Nozomu Yokoyama.Selectively Stimulating Skin Receptors for Tactile Display[J].IEEE Computer Graphics and Applications,1998,18(6):32-37.
[4]Zelek J S.Seeing by Touch(Haptics)for Wayfinding:Elsevier International Congress Series[C]//London,2005:1108-1112.
[5]崔建伟.力觉临场感系统中的异构式手控器设计[D]:[博士学位论文].南京:东南大学仪器科学与工程系,2004.
[6]Kim S Y.Medical Simulation with Haptic and Graphic Feedback[M].Lecture Notes in Computer Science.Heidelberg:Springer,2006,4091:171-178.
[7]Kim S Y,Kim K Y.Interactive Racing Game with Graphic and Haptic Feedback[C]//Proceedings of the 2nd International Workshop Haptic and Audio Interaction Design,Seoul,2007,4813:69-77.
[8]Wang P,Becker A A,Jones I A,et al.Virtual Reality Simulation of Surgery with Haptic Feedback Based on the Boundary Element Method [J]. Computers&Structures, 2007, 85(7/8):331-339.
[9]Galoppo N,Tekin S,Otaduy M A,et al.Interactive Haptic Rendering of High-Resolution Deformable Objects[C]//Proceedings of t he 2nd International Conference on Virtual Reality,Beijing,2007:215-223.
[10]Lee H P,Lin M C,Foskey M.Physically2based Validation of Deformable Medical Image Registration[C]//Proceedings of the 11th International Conference Medical Image Computing and Computer-Assisted,New York,2008:830-838.
[11]Zhang X R,Song A G,Sun W.A Novel Parallel Rhombus-Chain-Connected Model for Real-Time Softness Haptic Rendering[C]//Proceedings of the IEEE International Conference on Robotics and Biomimetics,Bangkok,2008,2:1038-1042.
[12]黄继伟,黄惟一,王爱民.感知机器人夹持器设计[J].传感技术学报,2003,16(4):397-400.
[13]祝钦,宋爱国,李建清.实时触觉再现接口的设计与实现[J].传感技术学报,2005,18(4):814-817.
[14]黄英,明小慧,向蓓.一种新型机器人三维力柔性触觉传感器的设计[J].传感技术学报,2008,21(10):1695-1699.
[15]徐菲,黄英,丁俊香.一种新型三维力柔性阵列触觉传感器研究[J].传感技术学报,2009,22(11):1542-1546.
[16]邹垂国,宋爱国,吴涓.基于DELTA手控器的纹理的力触觉表达方法[J].仪器仪表学报,2008,29(11):2310-2314.
