IP-S2移动测量系统在高速公路测量中的应用
2010-09-28麦照秋
麦照秋,陈 雨,郑 祎,王 磊
(1.国家测绘局第七地形测量队,海南海口 570203;2.北京拓普康商贸有限公司,北京 101102)
IP-S2移动测量系统在高速公路测量中的应用
麦照秋1,陈 雨2,郑 祎2,王 磊2
(1.国家测绘局第七地形测量队,海南海口 570203;2.北京拓普康商贸有限公司,北京 101102)
结合 IP-S2移动测量系统的技术特点,提出一套完整的高速公路测量应用方案,并成功应用于高速公路快速数据采集中,为高速公路管理部门关注的路面板块、道路附属物、服务区和加油站等信息提供了现势性很强的地形图和三维影像成果,也为高速公路建库管理的数据采集及更新提供了一种先进手段。
移动测量系统;传感器;道路测量;全景影像
一、前 言
随着我国公路建设事业的迅猛发展,高等级公路逐步实现了 GIS数据库管理,这种管理技术在对路面板块现状、道路附属物以及道路财产等的管理工作中显得尤为重要。为了能够获得道路板块现状,以确保道路通行通畅,管理部门希望能够获得现状地形图的同时,也能够获得现势性强的三维全景影像资料,做到及时、准确地掌握道路目前状况,快速查询道路且制定维护养护计划。
目前高速公路数据的采集,仍在使用传统的GPS RTK和全站仪等传统作业方式,作业效率低且作业安全隐患多,并且成果单一(二维地形图)。本文通过提出基于 IP-S2移动测量系统的一整套数字地形图测绘和全景影像获取的实施方案,既能达到提供常规数字地形图的要求,同时又能为道路管理部门提供三维全景影像,给道路管理部门对道路板块、道路附属设施和道路财产的管理提供了更多的便利。
二、IP-S2移动测量系统简介
IP-S2移动测量系统是目前世界上最为先进的一种测绘手段。它是在机动车上装配 GNSS全球定位系统、 IMU惯性测量单元、车辆控制编码系统以及激光扫描仪、数码相机等先进的传感器和设备来实现测量任务的。运用 IP-S2(如图 1所示),可以在车辆的正常行进之中,通过激光扫描和数码照相的方式快速采集城市、道路等目标区域或线路的整体空间位置数据、属性数据和影像数据,并同步存储在系统计算机中,经专门软件编辑处理,形成所需的专题图数据、属性数据和影像数据。

图 1 IP-S2移动测量系统
三、作业方案
公路管理部门为了实现建库管理,要求测绘公路两侧各约100m宽的1∶2 000带状地形图,同时要以更高精度采集路面(桥面)、收费广场等板块的三维坐标,以及全部道路附属物如电话亭、车辆监测器、里程碑等三维坐标。因此本文提到的高速公路测量,包含常规的数字地形图测绘与满足 GIS建库所需的数据采集。
经过 140 km的试验性生产,并在已用常规 GPS RTK和全站仪完成测绘的路段,用 IP-S2系统重新施测,对两套成果的平面和高程精度进行了大量的数据统计,选用多种作业方案比对,力求在满足精度要求的同时减少工作量,提高工效。结合 IP-S2系统技术特点,最后提出比较成熟的作业方案。
1.基站距离的设计
为保证 1∶2 000地形图测量及数据采集的精度,GNSS基站覆盖半径距离控制在 10 km以内为宜,一方面可以满足 GNSS/ IMU数据融合解算结果的精度,另一方面可以增加动态后处理的可靠性,减少设站数量。图 2为作业基站布设示意图。
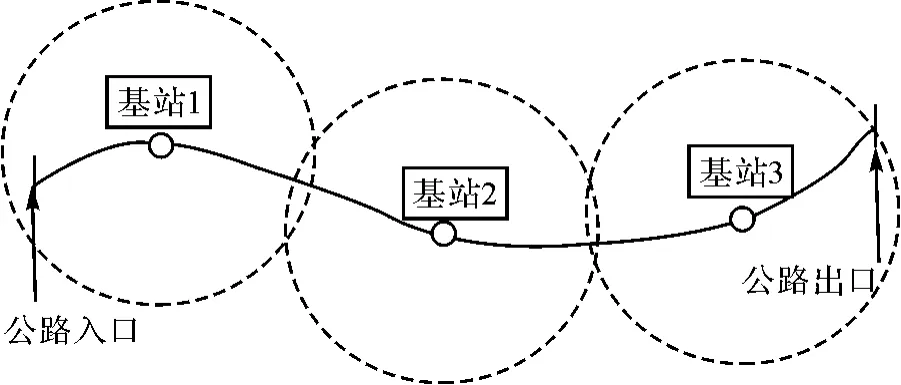
图2 测量作业基站布设示意图
2.车辆行驶速度
车辆行进速度应适中,将时速保持在 35~40 km/h左右为宜。这样激光扫描所得的点云阵列的线间距在 10 cm以内,以便线状及点状地物信息的采集。
3.影像数据的处理和整合
将经过数据处理后的三维激光点云和全景影像数据在专门开发的制图系统中进行数据整合,并完成内业成图。成图过程利用的是高精度的点云数据和清晰的影像资源,使作业从室外搬入室内。
4.平面坐标转换
输出成果坐标系统为WGS-84系统,而实际应用必须是 1954北京坐标系、1980西安坐标系或2000国家大地坐标系,因此要进行平面坐标系的转换。该项工作采用分段坐标转换方法进行,并通过重合路段数据进行检核。
平面转换技术采样常用坐标转换方法,即

式中:s、t为新坐标系内的坐标,x、y为旧坐标系内的坐标;a、b为旧坐标系原点在新坐标系内的纵、横坐标;θ为旧坐标系纵轴在新坐标系内的方位角;k为长度比。a、b、θ和 k等换算元素按最小二乘原理来确定。
5.水准高程转换
输出成果高程系统为WGS-84大地高,而工程实际采用的是 1985国家高程基准,因此需要进行高程系统的转换。本方案采用线状拟合技术,该项工作采用分段高程拟合方法进行,并通过重合路段数据和 GPS水准点进行检核。
高程转换技术采样常用的线性拟合方法,即

式中,H为大地高;h为正常高;ξ为高程异常。假设在距离较近的区域高程异常 (ξ)为线性变换,可利用线性变换公式和最小二乘原理求解。
整个作业流程如图 3所示。
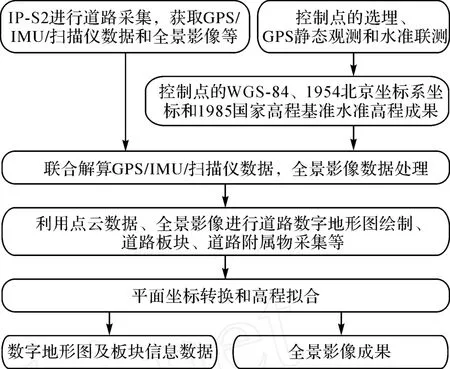
图3 作业流程图
四、结果和分析
1.精度统计
为了全面检验 IP-S2测量系统实际的测量精度,确保新装备、新技术成功应用在道路测量、三维景观测量和常规工程测量等工程中,笔者进行了以下几项精度检验。
(1)控制点平面及高程精度的检验与比较
通过在点云图上识别控制点并采集坐标与已知值比较(如图 4~图 5所示),并对差值进行比较,统计结果如表 1所示。

图4 三维点云上控制点采集结果
图5 二维点云上控制点采集结果
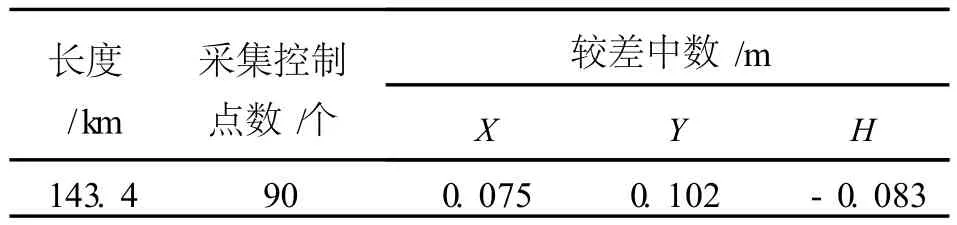
表1 控制点精度检核统计
(2)特征点平面及高程精度的检验与比较
通过在点云图上识别地形特征点(如图6~图7所示),并对采集坐标与已知值的差值进行比较,统计结果如表 2所示。
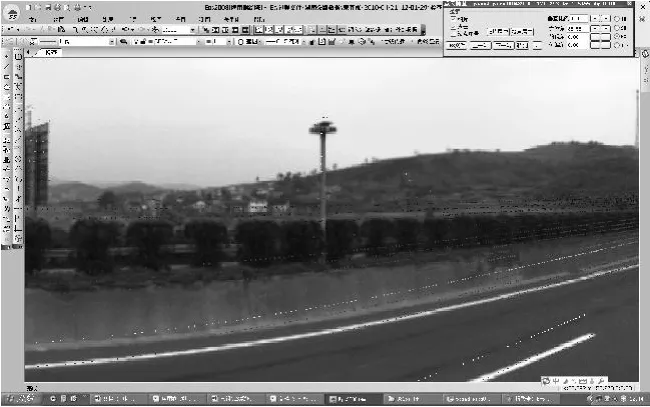
图6 三维点云上摄像头采集结果
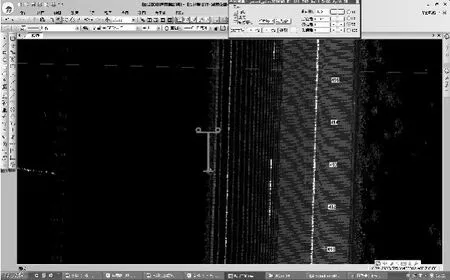
图7 二维点云上摄像头采集结果
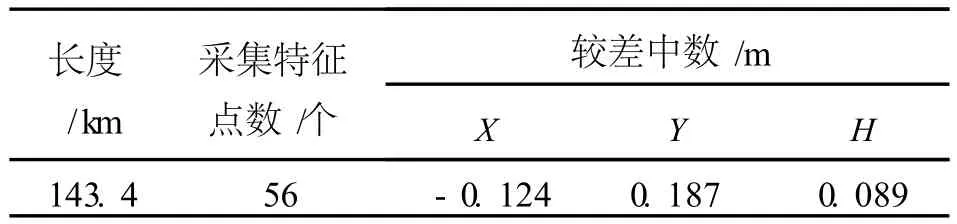
表2 特征点精度检核统计
(3)平面及高程转换后精度的检验与比较
采用分段坐标转换和线性高程拟合的方法对重合点进行比较,统计平面和高程差值,统计结果如表3所示。
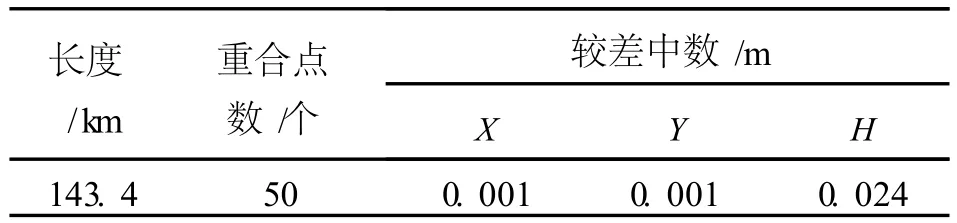
表3 重合点精度检核统计
通过比较得出,用分段坐标转换和线性高程拟合的方法可以满足 1∶2 000数字地形图测绘的要求。
2.成果形式
利用 IP-S2移动测量系统进行高速公路测量,能够得到以下成果:
1)外业采集的原始数据,处理后的点云和全景照片;
2)高速公路带状地形图(如图 8所示);

图8 带状地形图成果
3)高速公路三维采集和管理信息系统(如图 9~图 12所示)。

图9 高速公路路牌清晰可见(采集入库)

图10 全景量测功能

图11 点云绘图功能
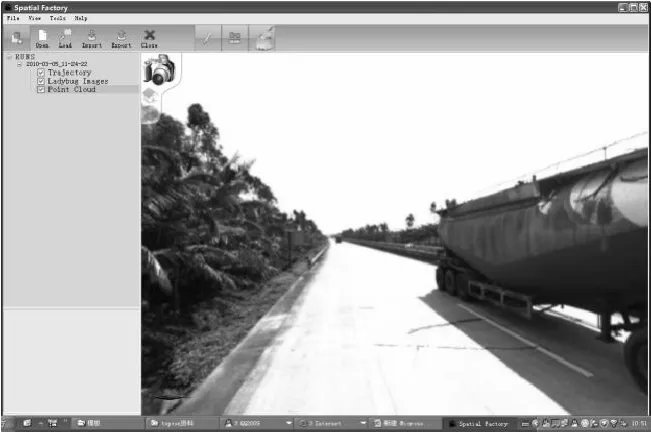
图12 道路裂痕清晰可见
3.工作效率
与传统作业方法比较,应用 IP-S2系统,外业作业内容只限于满足基准的控制测量以及极少扫描不到的地物补测,整体外业工作量减少了 80%左右;由于大量的外业工作变成室内的内业采集,使工程工效提高了一倍左右。带来了较好的经济和社会效益。
五、结束语
应用 IP-S2移动测量系统来完成高速公路数据采集项目,具有巨大的优势,主要体现在以下几个方面:
1)对高速公路的管理,形成了一套完整的一体化方案,使高速公路管理更加快捷、方便。
2)IP-S2的应用,完全满足高速公路各不同比例尺数字地形图测绘的精度要求,并且对于高速公路路面可以清晰的辨别(例如板缝、车辙等)。而更大的优势在于,照片和点云的同步采集,使管理员可以更清楚的了解公路状况。
3)高速公路测绘成果更加丰富直观,成果具有多样性。不再是简单的带状地形图,同时还可以通过全景相片,建立高速公路两侧的全景影像,更加生动地查看高速公路状况,多方面反应高速公路现状(如路牌、里程碑等)。
4)外业操作更加简单,减少测量员安全隐患。
5)大大降低了作业成本和缩短了工程工期,创造了更大的经济效益。
[1] 刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2003.
[2] 郑利龙,曹志刚.GPS组合导航系统的数据融合[J].电子学报,2002,30(9):1384-1386.
[3] 武汉大学测绘学院测量平差学科组.误差理论与测量平差基础[M].武汉:武汉大学出版社,2005.
[4] 张小国,王庆,万德钧.车载组合导航定位系统中传感器参数的实时校正[J].仪表技术与传感器,2000(6):32-33.
[5] 王华斌.万庆.高速公路养护管理信息系统设计与开发[J].地球信息科学,2005,7(4):71-76.
[6] 李洪涛,许国昌,孽鸿印,等.GPS应用程序设计[M].北京:科学出版社,2000.
Application ofM obileM easurement System IP-S2 in Highway Surveying
MA I Zhaoqiu,CHEN Yu,ZHENG Yi,WANG lei
0494-0911(2010)12-0023-04
P228
B
2010-11-04
麦照秋(1970—),男,海南昌江人,硕士生,高级工程师,主要从事大地测量学与 GIS方面的研究。
