星间微波测距系统相位中心在轨标定研究
2010-09-18张红军赵艳彬孙克新顾学迈
张红军,赵艳彬,孙克新,梁 磊,顾学迈
(1.哈尔滨工业大学 电子与信息技术研究院,黑龙江 哈尔滨 150001;2.上海航天技术研究院,上海 201109)
0 引言
地球重力学的精确测量对大地测量、地球物理、地球动力学和海洋学科的发展具有重要意义[1]。目前,卫星高精度重力测量主要有:高低卫卫跟踪模式(SST-hl),如2000年德国发射的CHAMP卫星;低低卫卫跟踪模式(SST-ll),如美国2000年发射的GRACE双星;重力梯度测量模式(SGG),如欧空局的GOCE卫星。低低卫卫跟踪模式包括两颗同一轨道的低轨卫星,在飞行方向上相距数百公里,卫星飞过重力异常区域时受到摄动,速度发生变化,轨道改变。通过测量2颗卫星间的距离和距离变化率,再消去非保守力的影响,可恢复出地球重力场模型[2]。星间微波测距系统是实现两颗卫星间距离和距离变化率的重要载荷,测量精度可达微米级[3]。1985年,MACARTHUR利用91 GHz和61 GHz系统试验证明此测距系统为可实现的[4]。
星间微波测距系统的安装指向与卫星轴线方向存在一固定夹角。卫星发射前,每颗卫星的星间微波测距系统的相位中心已预标定,但卫星在发射及入轨过程中产生的火箭振动、帆板展开时的星体振动、近地空间的电磁噪声环境及高能粒子的侵蚀等都会导致天线的几何结构和安装指向与卫星轴线方向间的固定夹角角度发生偏移,使卫星质心与相位中心的相对位置发生变化。因此,需进行星间微波测距系统相位中心的在轨标定[5、6]。
传统方法中,微波测距系统在一定角度范围内转动,同时记录其伪距和伪距率的变化,通过对伪距和伪距率测量与旋转角度间的关系引入估计算法实现在轨标定[4、6~8]。
本文对利用微波测距系统的伪距量测信息和卫星在轨运动的轨道信息间的几何关系实现在轨标定进行了研究。
1 在轨标定方案
1.1 星间微波测距系统相位中心
星间微波测距系统用于测量两卫星间的距离和距离变化率。与传统激光测距系统相比,在超稳定晶振性能达到要求的条件下用星间微波测距系统进行重力测量双星测距,可降低项目成本。
星间微波测距系统工作周期为0.1 s。其测距原理是通过测量重力测量双星的K、Ka波段的线性极化载波信号的相位变化间接获得两星间的距离变化。双星微波信号频率相差小于1/500 000 GHz,其极性平面互相正交。在每颗卫星上,发送和接收的信号被混合成正交基带信号。两星分别测出的相位变化结果导致一个有偏的距离尺寸,用截止频率1 k Hz的高通滤波器降低测量系统的时钟噪声。鉴于有用重力场信号的频率低于0.05 Hz,此测量方法相对“单程”相位测量方法来说是一个巨大的提高。
建立星间微波测距系统球坐标系,如图1所示。其几何中心位于坐标系原点,θ为极角;φ为方位角。由辐射指定组成的远场能量

式中:E(θ,φ),φ(θ,φ)分别为强度和相位;(R,θ,φ)为球坐标系中的观测点坐标;为总强度向量;k为相位常数;j为复数常量。
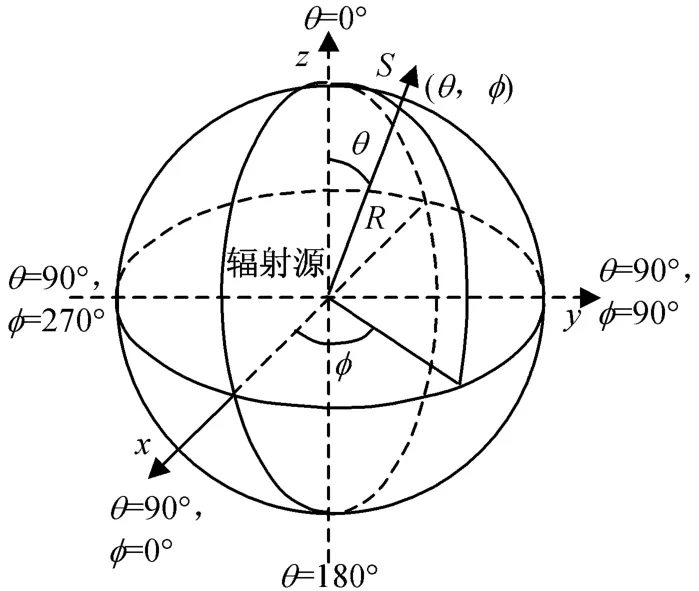
图1 星间微波测距系统球坐标系Fig.1 Sphere coordinate of K-band ranging system
在导航、追踪、自导引、返回等航空或航天系统中,通常在指定频率条件下给定一参考点,使φ(θ,φ)与θ,φ无关,则该参考点被称为星间微波测距系统的相位中心。当参考点为相位中心时,天线的场辐射为理想球面波,其表面任一处等相位。对星间微波测距系统来说,不存在一个绝对的相位中心可使辐射面上任一点相位绝对不变,但可确定一参考点,使在一定范围内φ(θ,φ)的值为一定常数。如在星间微波测距系统轴向的一定范围内,φ(θ,φ)的值为常数。
一般,确定星间微波测距系统相位中心的解析公式非常复杂,仅在相当多的限制条件下才能给出解析解。因此,一般采用实验方法确定相位中心。
在地面阶段,微波测距系统相位中心的标定是通过一个相位中心相对另一个相位中心进行一定规律摆动的方法实现的。但地面预标定的相位中心会因发射和在轨的多种因素发生变化,因此有必要进行星间微波测距系统相位中心的在轨标定。由于存在GPS精密定轨接收机,卫星在轨运行阶段,在一个特定的平面内,通过一颗卫星相对另一颗卫星旋转一特定的角度变化可确定星间微波测距系统的相位中心。
1.2 星间微波测距系统测量数据分析
星间微波测距系统测量如图2所示。图中:Oe为地心;Oe-XYZ为地心惯性坐标系;OA,OB分别为卫星A、B的质心;PCA,PCB分别为两星的星间微波测距系统的相位中心;rA,rB分别为两星在Oe-XYZ系中的位置矢量;RA,RB分别为两星的星间微波测距系统的相位中心在Oe-XYZ系中的位置矢量;dA,dB分别为两星质心与各自星间微波测距系统相位中心间的距离在卫星本体坐标系中的偏移矢量。则,有

式中:MA,MB分别为两星本体坐标系至Oe-XYZ系的姿态转换阵。
星间微波测距系统相位中心间的伪距R由星间微波测距系统直接测得。为实现其相位中心的在轨标定,需采用近似方法使得出的数据与星间微波系统的真实测量数据尽可能相等。该近似处理方程可表示为

式中:Rbr,Rnr分别为伪距测量偏置误差和白噪声误差。
因此,通过设计卫星的在轨姿态机动规律和参数,利用星敏感器和GPS接收机测量式(1)、(2)中的姿态和位置信息,将星间微波测量系统伪距量测信息引入估计算法,便可确定卫星上星间微波测距系统相位中心与对应卫星质心间的位置,实现相位中心的在轨标定。
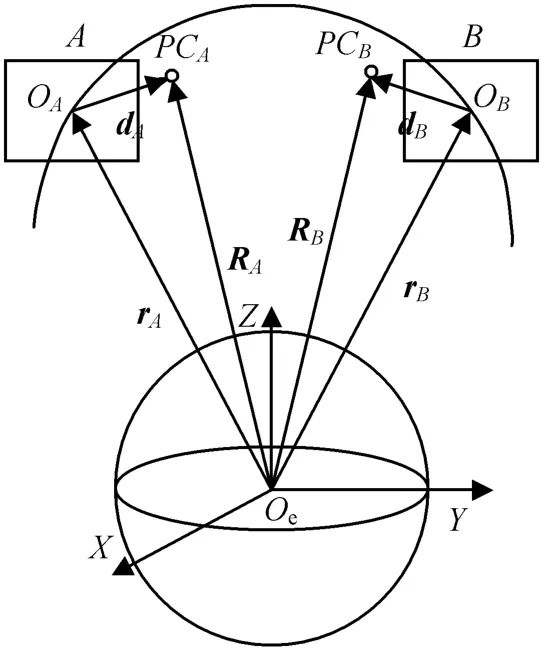
图2 星间微波测距系统测量Fig.2 Measurement principle of K-band ranging system
1.3 卫星姿态机动
卫星姿态机动方案如下。
a)机动律1
首先,卫星A的姿控发动机提供一适当的力矩使卫星A的偏航角φA产生一相对标称姿态(三轴对地定向)的有偏姿态角θ0,然后,姿控发动机产生一可变力矩使卫星A的φA产生一周期性机动,同时在整个姿态机动过程中,卫星A的滚转角和偏航角变化都须保持原标称姿态,且卫星B的姿态也保持原标称姿态。其姿态机动律为

式中:C,T分别为机动的振幅和周期;t为机动时间。
b)机动律2
该机动律与机动律1近似。不同的是此机动律控制卫星A的俯仰角φA,其姿态机动律为

c)机动律3
该机动律与机动律1近似。不同的是此机动律的作用对象为卫星B的偏航角φB,其姿态机动律为

d)机动律4
该机动律与机动律2似。不同的是此机动律的作用对象为卫星B的俯仰角φB,其姿态机动律为

在上述机动律下,卫星A、B的星间微波测距系统的相位中心沿滚转轴和俯仰轴方向有极高的测量灵敏度。
上述4种姿态机动中,姿控发动机提供的可变力矩必须实现对姿态角的精确控制。实际上,根据星间微波测距系统的相位中心的性质和地面标定方案可知,由相对大姿态机动幅值所得的相位测量灵敏度更高。因此,上述机动律的周期性并非必要,如姿态变化角度能达到要求的最大幅值,卫星姿态就能用任何方式绕以姿态有偏角为中心机动。需注意的是,在上述每一种姿态机动完成后,姿控发动机须将卫星调整为原标称姿态,然后再进行下一姿态机动。以下的非线性卡尔曼滤波在轨标定算法中,只取此4个机动过程中的数据进行标定计算。
1.4 非线性卡尔曼滤波
星间微波测距系统系相位中心在轨标定模型可用非线性卡尔曼滤波描述。其动力学模型和量测模型分别为

式中:ε为星间微波测距系统的量测噪声误差;Rreal为由星间微波测距系统测得的伪距;X(t)为状态;Y(t)为状态为量测轨迹。
将给定初始的估计状态X*(t0)代入状态方程,可得状态估计轨迹X*(t)。则量测估计轨迹Y*(t)是指将初始的估计状态X*(t0)代入星间微波测距系统伪距近似处理式(3)获得的。定义状态和量测残余分别为

同时,将非线性卡尔曼滤波器的状态方程和量测方程在X*(t)处作泰勒级数展开
由式(1)、(2)、(9)~(13),并省略泰勒级数的高阶项,得

经此述转换,将非线性估计转为线性估计。定义

式中:φ(t,ti)为状态转移阵,且

此处:I为单位阵。
由式(17)、(18)、(20)、(21)可得,在任何时刻,星间微波测距系统相位中心在轨标定算法的

根据上述推导,可将星间微波测距系统相位中心在轨标定算法的非线性问题转为状态残余的线性问题求解。其状态残余的离散型卡尔曼滤波基本方程为

式中:H(tk)为一步转移阵。用卡尔曼迭代可得状态残余的最优估计,与对应的同时刻的状态估计轨迹X*(tk)相加即可实现星间微波测距系统相位中心的标定[9]。
2 仿真
设卫星A、B的初始轨道数据为:

卫星每种姿态机动律机动时间1 000 s,标称姿态的控制精度为0.1°,其他参数见表1。卫星本体坐标系至Oe-XYZ系的姿态信息由星敏感器量测获得,星敏感器的非正交误差0.1 mrad,白噪声误差0.08 mrad。卫星的位置和速度信息由GPS接收机量测获得,GPS接收机的位置均方差为1 cm。星间微波测距系统伪距测量的偏置误差1μm,白噪声误差0.5μm。星间微波测距系统相位中心与其对应的偏移量dA=[-1.4 0.01 0.02]Tm;dB=[-1.4 0.02 0.01]Tm。将文中建立的星间微波测距系统系相位中心在轨标定非线性卡尔曼滤波模型解算的结果与给定的相位中心值相减,所得星间微波测距系统系相位中心在轨标定误差分别如图3~8所示。

图3 状况1时A星相位中心在轨标定误差Fig.3 Phase center error calibrated of state1 for satellite A
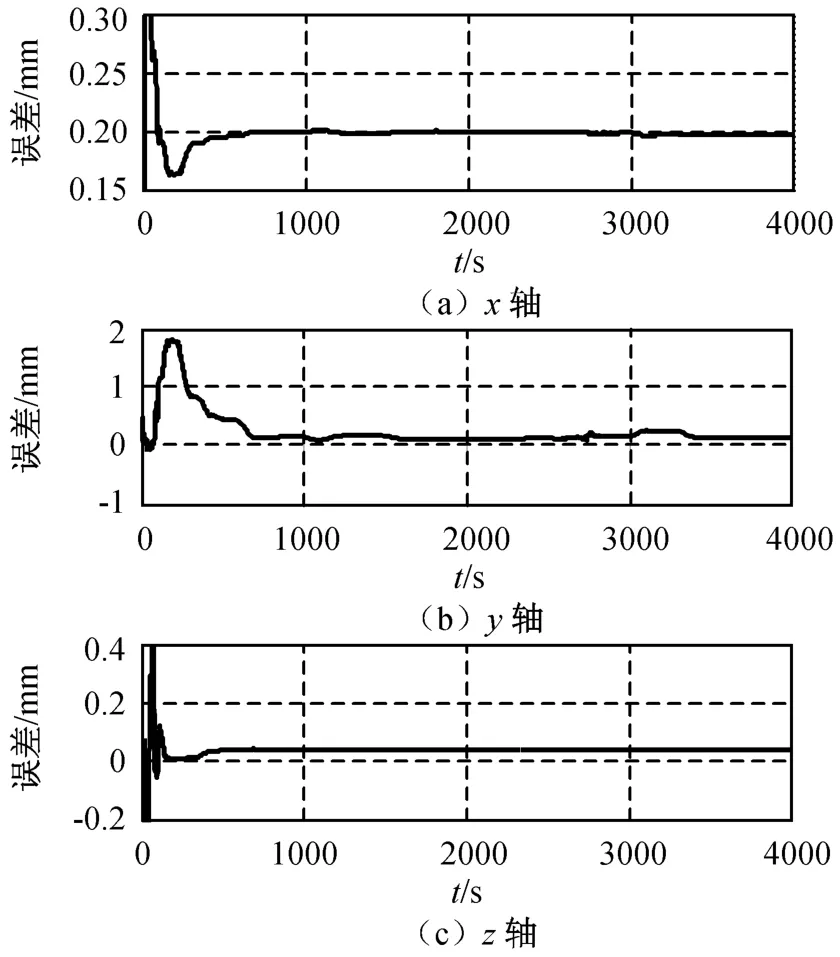
图4 状况2时A星相位中心在轨标定误差Fig.4 Phase center error calibrated of state2 for satellite A
仿真结果表明:在设定的3种姿态机动律中,卫星A、B相位中心在轨标定误差为X向0.2 mm,Z向0.05 mm,Y向略差低,亦可达0.2 mm(因有偏姿态角减小)。
表1 卫星姿态机动律参数Tab.1 Parameters of attitudemaneuver law for satellite
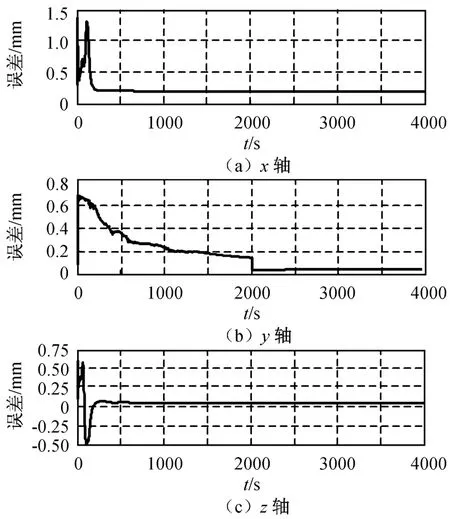
图6 状况1时B星相位中心在轨标定误差Fig.6 Phasecenter error calibrated of state 1 f or satellite B
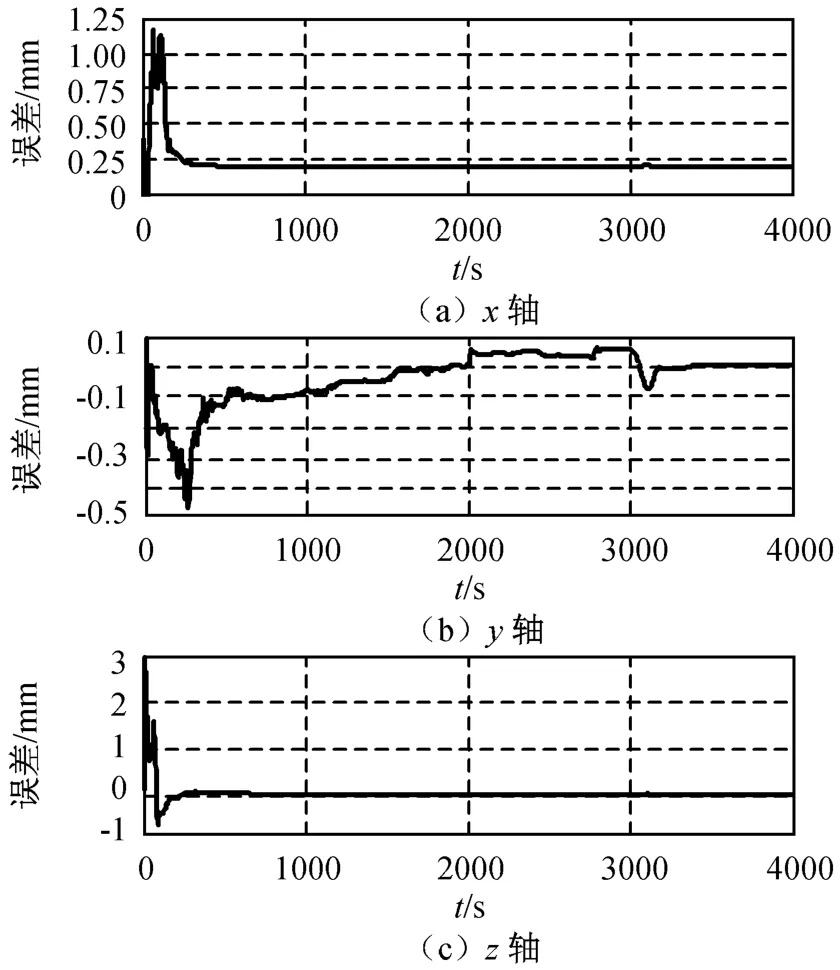
图7 状况2时B星相位中心在轨标定误差Fig.7 Phase center error calibrated of state2 for satellite B

图8 状况3时B星相位中心在轨标定误差Fig.8 Phase center error calibrated of state3 for satellite B
3 结束语
研究了当卫星质心已精确确定条件下的星间微波测距系统相位中心在轨标定。由卫星相对标称姿态产生一偏置姿态角,卫星绕偏置姿态角作周期性机动,用基于非线性卡尔曼滤波理论的星间微波测距系统相位中心实现在轨标定。仿真结果表明:虽仅将伪距量测信息代入估计算法,但该法仍有较高精度,且计算量有所减少。
[1]KIM J,ROESSET P L,BETTADPUR S V,et al.Simulations of the gravity recovery and climate experiment(GRACE)mission[C]//AAS/AIAA Space Flight Mechanics Meeting.Breckenridge:AAS/AIAA,1999:613-622.
[2]佘世刚,王 锴,周 毅,等.高精度星间微波测距技术[J].宇航学报,2006,27(3):402-406.
[3]MAZANEK D D,KUMAR R R.GRACE mission design:impact of uncertainties in disturbance environment and satel1ite force models[C]//AAS/AIAA Space Flight Mechanics Meeting.Clearwater:AAS/AIAA,2000:967-986.
[4]MACARTHUR J L,POSNERA S.Satellite to satellite range ratemeasurement[J].IEEE Transactions on Geosciences and Remote Sensing,1985,23(4):517-523.
[5]KIM J R.Simulation study of a low-low satellite to satellite tracking mission[D].Austin:University of Texas at Austin,2000.
[6]Furun W.Study on center of mass calibration and Kband ranging system calibration of GRACE mission[D].Austin:University of Texas at Austin,2000.
[7]SHARMA J.Precise determination of the geopotential with a low low satellite to satellite tracking mission[D].Austin:University of Texas at Austin,1995.
[8]THOMAS J B.An analysis of gravity-field estimation base on inter satellite dual 1 way biased ranging[M].Pasadena:JPL Publication,1999.
[9]秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西安工业大学出版社,1998.
