智能轮椅导航系统的仿真与实验
2010-09-17王丽军
王丽军
0 引言
随着社会老龄化进程的加快以及由于各种疾病、交通事故等原因造成下肢损伤的人数的增加,性能优越的代步工具变得越来越重要。智能轮椅作为服务机器人,能够帮助他们提高自由行动能力及重新融入社会。自1986年英国开始研制第一辆智能轮椅来,许多国家都投入较多资金研究智能轮椅,使其具有了自定位、导航、避障、人机交互等功能[1]。
导航是智能轮椅研究的关键所在,很多智能轮椅都有自己的导航方法。Bremen Autonomous Wheelchair Project[2]主要讨论了通过平滑的速度控制来实现智能轮椅的导航;Smart Chair[3]运用人工势场法进行导航,但是这种方法容易使智能轮椅陷入一个局部区域,并且容易在障碍物前振荡;VAHM[4]以全局路径规划为基础,然后按照规划所得到的路径进行导航,但是它是在导航前完成的路径规划,没有考虑导航过程中环境的变化,很难实现在动态环境下导航;Maid[5]将环境分为狭窄、混乱的区域和宽阔、拥挤的区域,分别使用不同的导航方法;而中国科学院研制的智能轮椅[6]则提出了在狭窄区域的导航策略。
首先,本文介绍了一个基于模块化设计的移动机器仿真平台。然后,结合仿真平台以及实际导航中遇到的问题,建立了动态环境下智能轮椅的导航系统。本系统将全局规划和局部行为以及重规划结合在一起,通过激光雷达探测周围环境的变化,并根据环境变化的程度选择一种能够适应环境变化的导航方法。最后,实验结果表明,本系统可以使智能轮椅成功得抵达目的地。
1 仿真系统
本仿真系统采用模块化设计,共有图形化编程、路径规划、3D地图编辑器和3D仿真平台4个模块,各模块之间通过CORBA相连。结构图见图1。
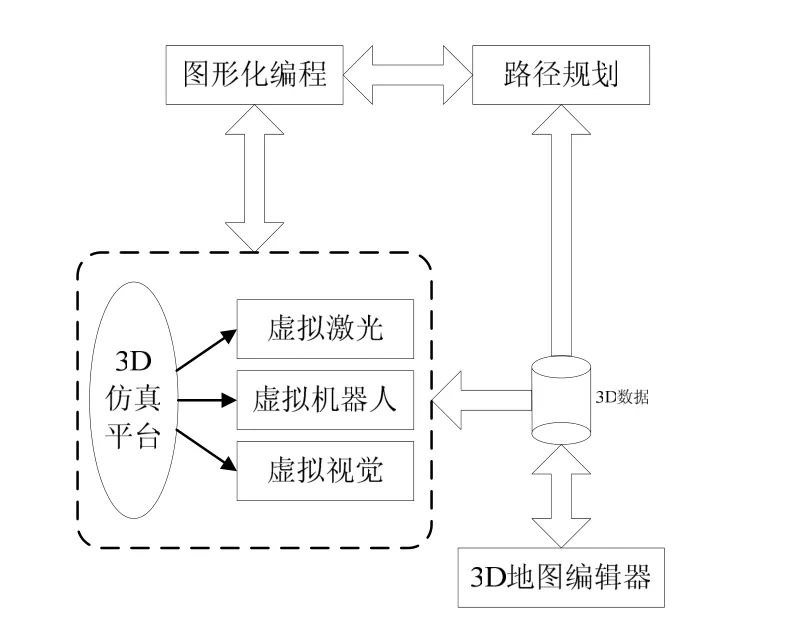
图1 仿真系统结构图
1.1 3D地图编辑器
此模块用于将实际环境的物体模拟在系统中,主要包括墙壁、桌椅、书柜、冰箱等等,然后将环境存储为xml格式文件,供其他模块调用。虚拟地图见图2。

图2 虚拟地图
1.2 3D仿真平台
在3D仿真平台中,用户可以将实际环境中的物体模拟在虚拟环境中,并且可以使机器人在模拟环境中运动,见图3。其中地图是通过3D地图编辑器编辑而成的。
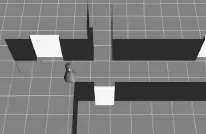
图3 3D仿真平台
3D仿真平台还包括两种虚拟传感器用来探测周围的环境,包括虚拟视觉和虚拟激光测距仪,见图4。图中两种传感器的数据都是机器人在图一中所示位置得到的。
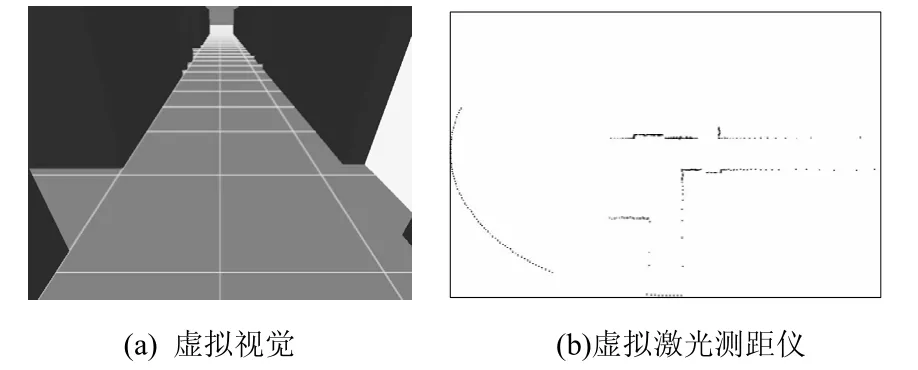
图4 传感器信息
在导航过程中,3D仿真平台会实时的接收图形化编程模块发送过来的机器人位姿数据,进而调整机器人的位姿;同时,他还会将传感器的数据反馈会图形化编程模块,以便图形化编程模块控制机器人的导航行为。
1.3 路径规划
路径规划是实现导航的基础。本系统的路径规划基于拓扑地图,其中拓扑地图是通过3D地图编辑器编辑而成的。
该模块会接收图形化编程模块提供的起点和终点,然后按照 A*算法[7]得到一系列最短路径的路径点,然后发送回图形化编程模块。
1.4 图形化编程
图形化编程模块是本系统的核心,它决定机器人是如何运动的。首先,用户指定起点和终点以及过程点,并指定机器人要运动的地图环境,见图5。然后,该模块会将以上信息发送至路径规划模块。待路径规划模块运算完毕后,图形化编程模块会接收到一系列路径点,见图 6。图中每一个MBase框代表一个路径点。

图5 路径规划设置

图6 路径点
图形化编程模块接收到路径点后,会按照一定周期计算出每周期内机器人应到达的位置,并将此位置发送至3D仿真平台,控制机器人的运动。同时,图形化编程模块接收虚拟传感器传回来的数据,时时地监测环境,以便根据环境的变化调整导航策略。
2 智能轮椅导航系统
2.1 总体结构
上文介绍了移动机器人的仿真平台,但是在实际中导航与仿真有很大的区别。第一,实际环境中的导航不像仿真中导航一样系统会知道机器人所在的位姿,而是需要对机器人进行定位求得机器人的位姿;第二,实际环境不像仿真中的环境是不变的,而是在动态变化的,这就导致导航前进行的路径规划有可能在某些区域是无效的;第三,实际环境中的导航是有误差的,并且有些环境很难定位,不像仿真时机器人可以精确地到达某个位置,并且在任何环境下都能知道自己的位姿。考虑以上机器人实际导航和在仿真中导航的不同,我们设计了下面的导航系统,其中我们的机器人系统是智能轮椅。
首先,我们将3D仿真平台替换为智能轮椅系统,智能轮椅可以通过控制速度、位置以及驱动力来控制轮椅的运动。然后将虚拟激光测距仪单元换为真正的激光测距仪进行定位和环境检测。第三,将路径规划模块扩展为由全局规划和局部规划构成的导航规划控制,以适应动态环境的变化。最后将图形化编程模块扩展为用包含了若干种导航行为的导航行为控制来规划整个导航过程。另外,我们还加入了若干种人机接口以方便人机交互。结构图见图7。
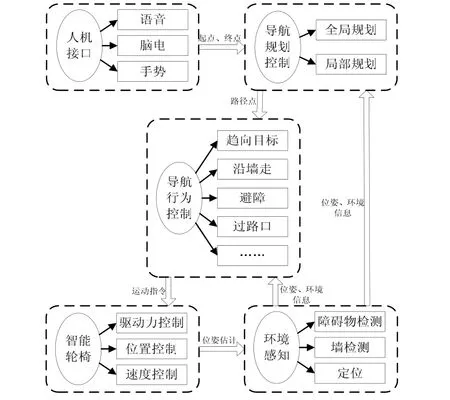
图7 导航系统总体结构
2.2 导航规划控制
为了实现动态环境下智能轮椅的导航,我们将全局规划和局部规划结合起来构成导航规划控制。全局规划主要是离线路径规划;局部规划包括在线路径重规划和局部避障行为。系统会根据环境的变化选择合适的方法。流程图见图8。
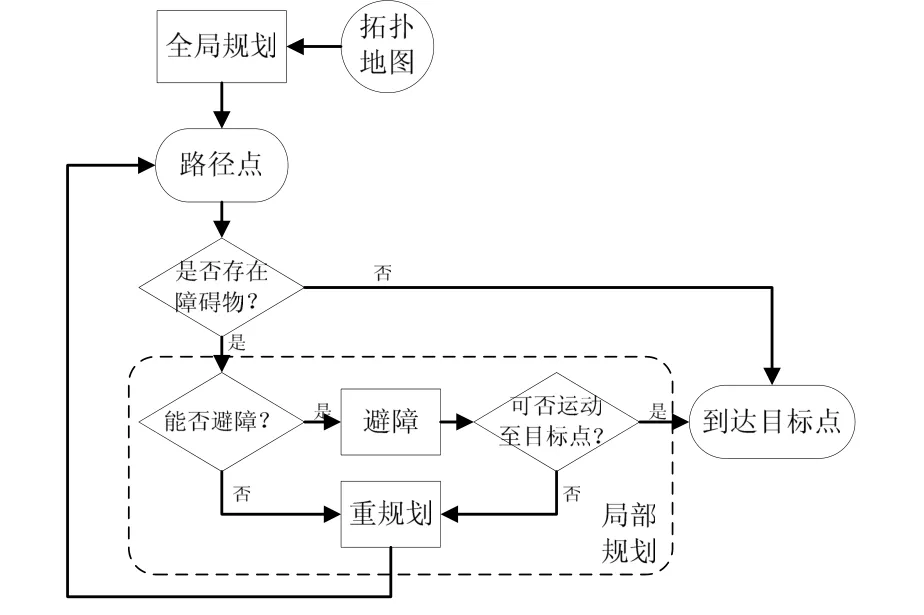
图8 规划流程图
首先,用户依据3D地图编辑器得到的拓扑地图以及人机接口所提供的起点、终点和过程点,根据 A*算法[7]得到一系列最短路径的关键路径点,并把这些路径点依次发送至导航行为控制程序,进而控制轮椅运动至这些路径点。这就完成了全局规划的部分。如果在导航过程中没有遇到障碍物并且定位准确,这部分就可以使轮椅成功的抵达目的地。
在导航过程中,安装在轮椅上的激光测距仪会实时的探测周围的环境,并与系统中所存储的环境信息进行比较,一旦发现在运动路途中存在障碍物,智能轮椅将根据障碍物的信息并结合周围环境生成新的局部地图进行判断:如果障碍物的尺寸不足以阻挡轮椅前进的道路,轮椅将采取避障行为来绕过障碍物,然后判断此时是否可以运动至目标点,如果可以则继续向路径点运动,否则将进行重规划;如果障碍物已经封住了轮椅前进的道路,轮椅同样需要重规划。在重规划过程中,系统首先将变化的局部地图融入全局地图,并以此时轮椅所处的位姿为起点加入拓扑地图,仍以目标点为终点,再次利用A*算法进行路径规划,得到一条新的路径,随后轮椅将按照新的路径进行运动。
2.3 导航行为控制
鉴于智能轮椅的导航有它的特殊性,它的尺寸比较大,所处的环境动态性比较强,以及我们系统的局限性,本系统将整个导航过程分为若干个导航行为,通过激光测距仪对环境的检测获知智能轮椅所处的状态,进而选择合适的导航行为。所采用的导航行为模式包括:趋向目标、沿墙走、避障、过路口等等。系统会根据环境的不同选取相应的导航行为来控制轮椅的运动,见图9。
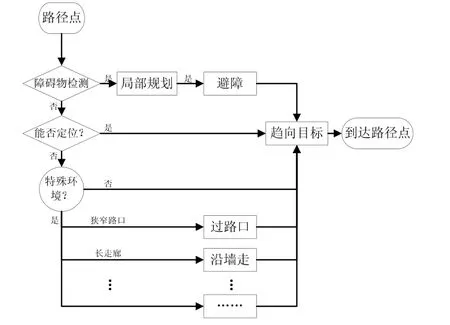
图9 行为模式流程图
通过以上这几种行为模式,智能轮椅可以在导航过程中,根据环境的变化,灵活的选择其中一种方式进行运动,最终到达指定点。
3 实验结果与分析
3.1 系统介绍
本系统所采用的智能轮椅是在一般电动轮椅的基础上改装的,结构见图10。
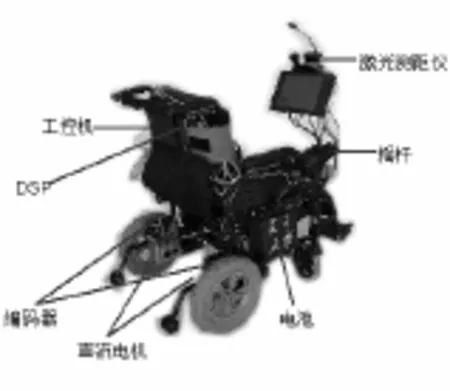
图10 智能轮椅
硬件共有下面几部分构成:
1、处理单元:工控机,CPU:双核2G;
2、感知单元:URG-04LX激光测距仪,其扫描范围为240°,最大半径为4m,分辨率为0.36°,采样周期为100ms;
3、执行单位:下位采用TI公司的32位高性能DSP运动控制器——TMS320F2812,与上位机通过串口进行通信,通信率为 19200bps;有 3种工作方式:控制驱动力、控制速度、控制位置。
3.2 实验环境
实验环境为上海交通大学电信群楼 2号楼 2层,见图11。

图11 实验环境
3.3 实验与分析
首先,我们将起点设在 216室的门口,终点设在 200室的房间内。然后通过路径规划,我们得到一条最短路径。为了验证所用方法的有效性,我们对环境做了一些改变,首先在走廊上放置了障碍物,并且将200A门关闭,如图12,这样轮椅就无法沿规划好的路径到达目的地。
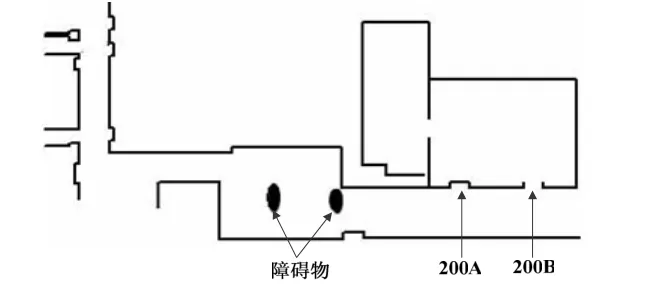
图12 改变后的环境地图
开始导航后,轮椅会通过激光测距仪实时的探测周围环境的变化。首先轮椅会进入一个较长的走廊,由于此时无法对轮椅前进方向上进行定位,所以在此时轮椅选择沿墙走行为。转弯后,轮椅会遇到障碍物,由于此时障碍物两侧还有足够的空间,故轮椅会采取避障行为来绕过障碍物;当轮椅走到200A门要进入200室时,发现此处的障碍物完全封住了路口,无法通过避障绕过,所以此处进行重规划,得到一条新的路径,即转从200B门进入200室。要进入200室时,由于门口较窄,轮椅会采取过路口行为左转进入房间。实际路径图见图13。通过上面实验可以看到,轮椅顺利的达到了目标点,验证了我们所采用方法的有效性。
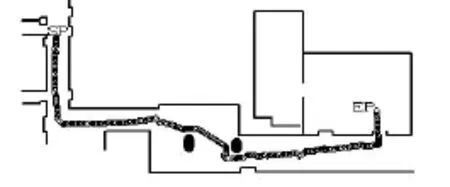
图13 实际路径图
4 结论
在本文中,首先我们介绍了一个移动机器人的仿真平台,然后,结合仿真平台和智能轮椅在实际导航中的困难,我们将全局规划同局部规划结合在一起,并且根据周围环境的不同,设计了几种行为模式。轮椅在导航过程中可以根据环境的不同,在线的切换到不同的任务和行为,成功的完成了动态环境下的导航任务。
[1]鲁涛,原魁,朱海兵.智能轮椅研究现状及发展趋势[J].机器人技术与应用, 2008, 2: 1-5.
[2]Lankenau A, Rofer T. A versatile and safe mobility assistant[J]. IEEE Robotics and Automation Magazine,2001, 8(1): 29–37.
[3]Parikh S P, Grassi V Jr.et al. Integrating human inputs with autonomous behaviors on an intelligent wheelchair platform[J]. IEEE Intelligent Systems, Match/April 2007,22(2): 33-41.
[4]Bourhis G, Horn O.et al. An autonomous vehicle for people with motor disabilities[J]. IEEE Robotics and Automation Magazine, 2001, 8(1): 20–28.
[5]Prassler E, Scholz J, and Fiorini P .A robotics wheelchair for crowded public environment[J]. IEEE Robotics and Automation Magazine, 2001, 8(1): 38–45.
[6]Tao Lu, Kui Yuan, et al. Study on navigation strategy of intelligent wheelchair in narrow spaces[A]. Proceedings of the 6th World on Intelligent Control and Automation[C].Dalian, China, 2006: 9252-9256.
[7]LaValle S M. Planning Algorithms[M]. Cambridge University Press, 2006.
