基于DSP的无人机数据采集系统的设计
2010-09-11季明丽李赛辉
周 涛,季明丽,李赛辉
(1. 江苏海事职业技术学院 电气工程系,南京 211170;2. 西北工业大学 第365研究所,西安 710072)
基于DSP的无人机数据采集系统的设计
周 涛1,季明丽1,李赛辉2
(1. 江苏海事职业技术学院 电气工程系,南京 211170;2. 西北工业大学 第365研究所,西安 710072)
在飞行控制过程中需要采用可靠性好、速度快、以及精度高的数据采集系统来实现对无人机的实时控制。一般的数据采集系统很难满足以上要求。本文着重阐述了基于TMS320F2812的某型无人机数据采集系统软件和硬件的实现过程。其中包括DSP最小系统设计、各种信号调理电路、模数转换单元、与飞控机CAN通信电路的设计等。分析了该系统在实现过程中需要解决的一些问题其中包括系统的体积以及抗干扰性等。
DSP;数据采集;飞行控制;无人机
0 引言
在无人机设计中,由于受到体积和重量等的限制,所有的设备必须满足体积小、重量轻、可靠性高以及电磁兼容性好等要求。作为无人机的前端处理部件,数据采集系统的性能直接关系到无人机能否高质量完成飞行任务,而其可靠性则会影响到无人机的生存能力,一般的数据采集系统很难满足以上要求[1,2]。因此,本文为某型无人机设计了以DSP为核心控制器的数据采集系统,用来检测无人机舵机系统中的舵面偏转角、舵机驱动器的母线电流以及舵机周围环境温度参数等。
1 系统概述
从无人机传感器过来的模拟输入信号通过含有隔离、滤波、放大以及各种保护功能的信号调理单元后送入模数转换单元输入端,由飞控机发送控制命令字通知DSP选择某个模拟通道进行转换,然后由DSP根据A/D转换单元的特点开启模数转换。当转换结束后,DSP读取转换结果并对其进行数字平滑滤波,最后再将数据通过CAN总线上传给飞控机。为了保障在宽范围的温度下也能正常工作,DSP要不断检测环境温度,当温度不在工作范围时飞控机作出相应的处理。系统总体结构如图1所示。
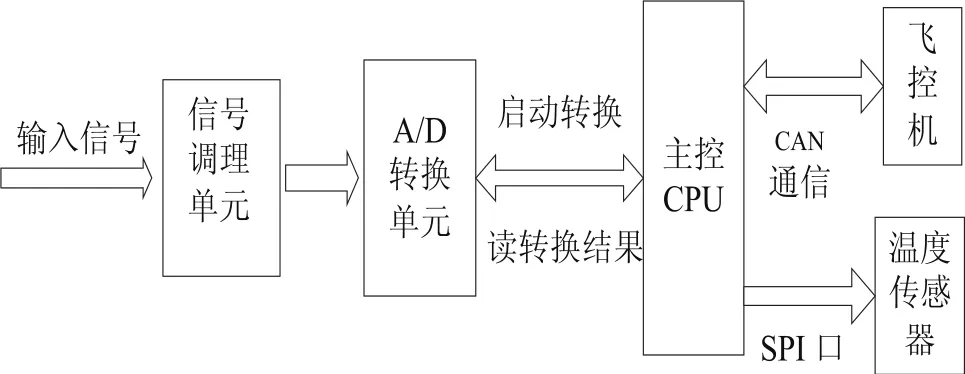
图1 系统总体结构
2 硬件实现
数据采集系统的硬件电路包括DSP主控电路、串口通信电路、A/D转换电路以及信号调理电路。
2.1 DSP的选择与电源的配置
本文选用美国德州仪器公司生产的TMS320F2812芯片作为主控单元。它具有以下显著优点:
1)主频150MHz 32位内核,运算速度很好地满足了新一代飞控机对数据处理速度的要求;
2)片上集成256 K 字节的闪存,方便自启动,无需外部扩展,从而大大减小了系统的尺寸;
3)内带UART 以及增强的CAN 总线接口,方便与不同上位机协议通信的硬件设计,本系统将采集好的数据通过CAN上传给飞控机;
4)内含丰富的中断源,能够及时处理各种突发事件大大提高系统的可靠性同时也便于以后系统的升级[3]。
DSP的电源设计是DSP应用系统设计中一个重要的组成部分。由于DSP在系统中要承担大量的实时数据计算、在其CPU内部,部件的频繁开关转换会使系统功耗大大增加,所以没有一个良好的供电系统很难保证系统的可靠,稳定。本系统采用TI公司生产的双路低压差电源稳压器TPS767D318,它一路输出3.3V供I/O电源,另一路输出1.8V供内核电源,TPS767D318是一款专为DSP运用系统而设计的电源稳压器,它具有效率高,每个稳压端输出电流范围为0mA-1A,响应速度快等特点。
2.2 A/D转换单元
采用TI公司生产的ADG426多路选择器和AD976A模数转换芯片组成16路A/D转换单元。ADG426切换速度快且选择的输入端数量可达16路,可以完成模拟输入量多且转换速度要求快的无人机数据采集系统。16位的AD976A芯片,片内置采样保持器,最大采样频率200KHz,输入电压范围-10至+10伏,最大功耗100mW,能够分辨的电压为0.305mV这些特性满足数据采集系统对速度和精度的要求。
主控DSP TMS320F2812的外部数据线XD0、XD1、XD2、XD3与多路选择器ADG426的地址线A0、A1、A2、A3相连来完成输入通道的选择。DSP的 信号端与ADG426的 信号端相连,两者要进行电平转换。访问Zone0和Zone1空间都会使得外部片选信号 变低,此信号与外部地址XA13、XA14组合产生Zone1空间片选信号并将此信号作为AD976A的片选信号 。DSP的外部数据线XD0-XD15通过电平转换与AD976A的数据线D0-D15相连。AD976A开始采样是在R/ 引脚的下降沿进行,DSP的R/ 在平常是高电平,一旦往外写数据时会产生一个下降沿此信号通过电平转换后与AD976A的R/ 端相连。GPIOA配置为通用的输入口,GPIOAP0与AD976A的 端相连。
2.3 信号调理电路的设计
信号调理电路是无人机数据采集系统的重要组成部分。本文主要有无人机系统的舵机电流检测电路、舵面位置检测电路的设计。
由于无人机对尺寸的要求非常严格,霍尔电流传感器体积大不适合作为舵机母线电流的检测元件。本系统采用VISHAY 0.01/5W电阻串接在功率驱动回路中,将电流信号转为电压信号。无人机系统由数字电路、模拟电路和功率电路构成,包含有强电、弱电电路元件,结构较复杂,这就给数据采集系统的可靠性和抗干扰性设计提出非常高的要求。为了防止无人机中的功率放大部分对信号处理部分的干扰,反馈的电流信号在进入AD转换芯片前必须进行隔离。
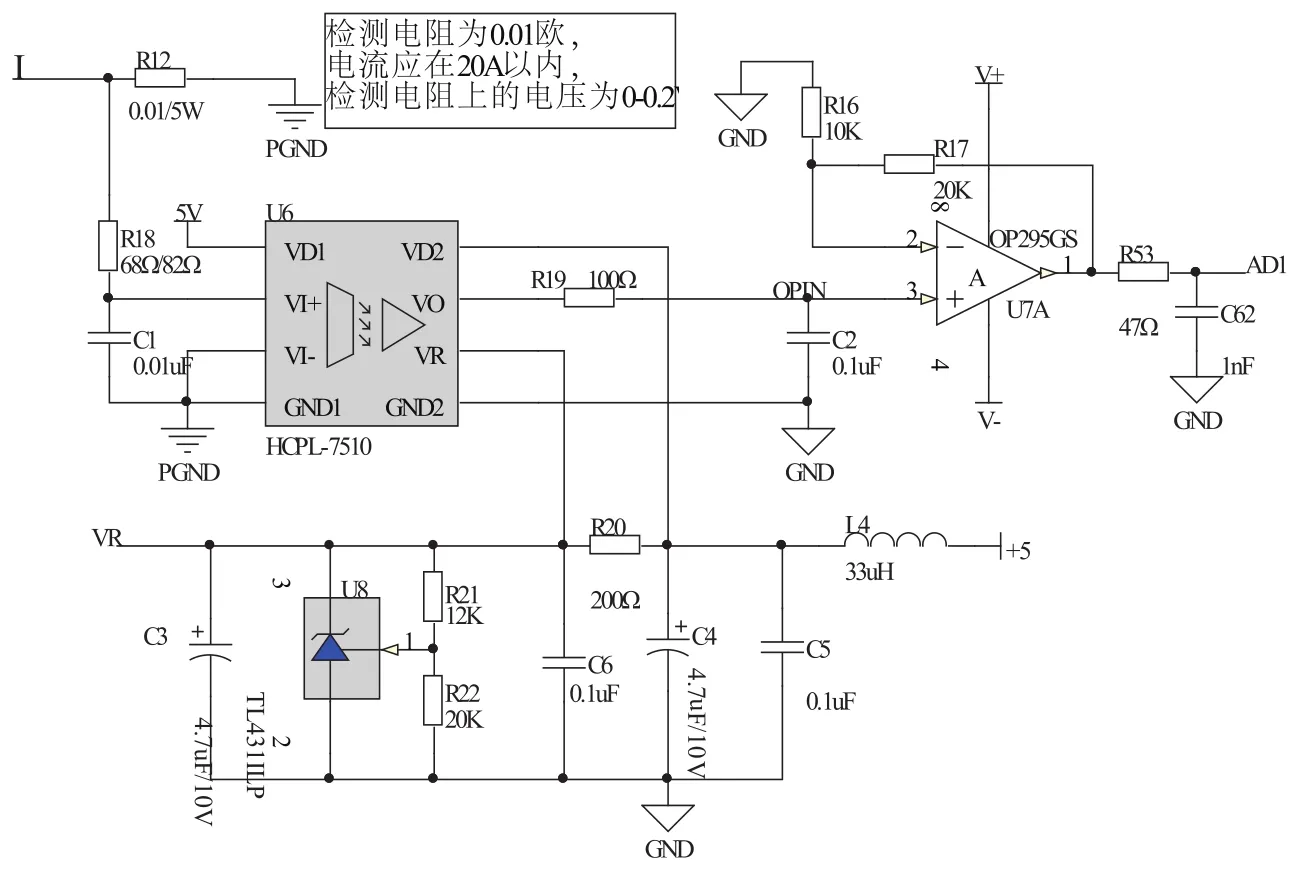
图2 电流检测电路图
HCPL-7510 是 Agilent公司推出的适合检测电动机绕组电流线性隔离检测芯片。电流检测电路如图2所示。
舵面偏转角是由精密导电塑料电位计来检测的,此传感器特点是偏转角度与电位计上的电压成正比。舵机电位器使用5V基准电压供电,输出的角位移信号是一个电压信号。使用一个仪表放大器对位置电压信号进行调整,将单边的信号转为±5V电压信号。舵偏角范围为60度,仪表放大器的放大倍数选为12。经过调理后的位置信号输入A/D转换单元。检测电路如图3所示。
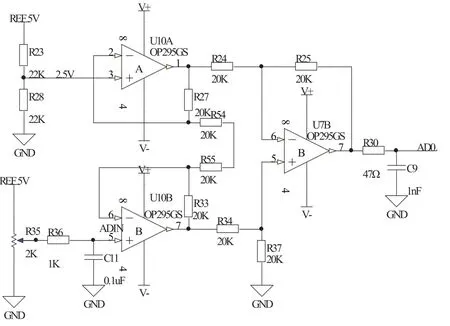
图3 舵面偏角检测电路
2.4 CAN通信电路
受无人机体积、重量的限制,众多的机载电子设备同时一起工作,特别是电缆周围强功率的无线电发射机和接收机、开关电源以及大功率器件等都成为通信电缆的干扰源,它们可不同程度地进入数据采集系统,从而降低了系统的可靠性,严重时还会危及无人机安全。本课题采用具有接口简单、传输速率高、实时性好、抗干扰能力强等特点的CAN总线来和飞控机通信。由于无人机内部数据传输距离短,CAN总线数据传输速度可达到1Mbps,满足实时性要求。

表1 实验数据
本系统选用高速C A N收发器模块SN65HVD230,该芯片内部集成了所有必需的DC-DC转换、CAN隔离及CAN收/发器件。模块的主要功能是将CAN控制器的逻辑电平转换为CAN 总线的差分电平并且具有DC 2500V的隔离功能。该芯片符合ISO 11898 标准,因此,它可以和其他遵从ISO 11898标准的CAN收发器产品进行数据交换。
2.5 温度检测
无人机上的设备在使用中面临非常严峻的温度环境,一方面在地面调试时机舱内可能有很高的温度,另一方面在高空中可能要在极低的温度下工作,这两种极限情况对设备都是及为不利的。为了检测工作状态和内部环境,在系统内置一个很小的温度传感器ADT7301,该芯片可以在-40至150度之间工作,在常温精度可以在1度以内,供电3.3V。DSP通过SPI接口和ADT7301相连,DSP设置为主模式。数据在时钟下降沿送出,温度更新率为1秒,温度转换时间为800us,读取不影响转换。
3 软件设计
系统软件由主程序和中断程序组成。包括以下几部分:主程序初始化、A/D转换处理、数字滤波处理、温度传感器数据的读取以及CAN通信。数据采集系统的工作过程如下:系统初始化后开始自检测包括检测A/D采集故障,数字指令接收超时等。接下来的主程序是个循环体,它每秒钟读取一次温度值,当读到的温度值不在正常范围时,DSP做相应的处理[4]。
当数据从飞控机传来后DSP 响应中断程序,将接收到的数据进行处理,同时将结果写入ADG426的通道选择端并启动模数转换芯片AD976A。在AD转换过程中AD976A的 端保持低电平转换结束后变成高电平。DSP通过查询此端口来判断模数转换是否完成。当数据转换完毕,TMS320F2812读取转换结果并进行平滑滤波处理,同时将最后结果上传给飞控机。
4 实验结果
系统采用周立功公司生产的USBCANII智能CAN接口卡作为PC机的转接卡,计算机通过USB总线连接至数据采集系统。
数据采集系统通过CAN总线将温度和参考电压反馈给PC机。在DSP程序中,温度作为CAN控制器5号邮箱的高字节数据而参考电压作为低字节数据来发送。由表1可得系统的反馈温度为23H即为35度。通过AD976A采集端口来获取参考电压的反馈量,端口的输入电压范围是-5V-5V。由表1可得参考电压的反馈值为7FFFF即524287,对应的电压为 V。实验表明:整个系统简单可靠,运行效果良好,其性能满足某型无人机对数据采集系统的要求[5]。
[1]刘迎春,何清华,贺继林,等.DSP56F807在小型无人机舵机控制器中的应用[J].湖南工程学院学报,2007,17(3):34-37.
[2]李赛辉,雷金奎.基于 D S P的数字舵机控制系统的设计与实现[J].计算机测量与控制,2009,17(3):484-486.
[3]张卫宁.TMS320C28x 系列DSP 的CPU与外设(上,下)[M].北京:清华大学出版社,2004.
[4]苏奎峰,吕强,耿庆锋,陈圣俭.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
[5]胡林.高精度舵机控制器的研制[D].西北工业大学,2005.
The design of UAV data acquisition system that based on DSP
ZHOU Tao1, JI Ming-li1, LI Sai-hui2
book=32,ebook=1
TP202
B
1009-0134(2010)11(下)-0055-03
10.3969/j.issn.1009-0134.2010.11(下).21
2010-08-21
周涛(1961 -),男,安徽阜南人,副教授,硕士,研究方向为自动控制。
