大功率电机应用于造波机控制系统的可行性研究
2010-09-09李木国
李木国,刘 闯, 王 静,
)张 群
大连理工大学,大连 116024
大功率电机应用于造波机控制系统的可行性研究
李木国,(刘 闯, 王 静,
)张 群
大连理工大学,大连 116024
结合实际课题取得的成功经验,介绍了大功率大型不规则波造波机控制系统的组成及工作原理,阐述了该系统实验工作过程中的性能以及特性曲线,实验结果证实大功率电机应用于大型造波机领域频繁正反转的可行性。
造波机;大功率;运动控制;伺服电机;控制系统
Abstract:With the success experience of practical issues,this paper introduces composition and working principle of the irregular large high-power wave-maker system.Performance and characteristic curves during the experimental work of the system are described.Experimental results show that it is feasible to apply high-power motor to bidirectional rotation frequently in the field of large wave-maker system.
Key words:wave-maker system;high-power;motion control;servo motor;control system
0 引言
随着海洋工程技术的发展,科研人员急需在试验水池中精确模拟产生大波高(波高大于1.1 m),提高实验研究精度,完成各种物理实验研究,为工程设计和科学研究提供可靠依据。本文结合实际工程情况,试制了一台大功率电机驱动大型造波机系统,该造波机系统可产生周期4 s,波高1.15 m的浪。造波板的最大推力6 t,最大速度1.5 m/s,最大行程1.8 m,电机功率108 kW。
由于伺服电机控制性能好,快速响应能力强且无污染[1,2],因而在造波机设计生产中,国内外采用电机驱动的系统越来越多[3]。但大功率伺服电机转动惯量大,在如此大的负载下能否在给定的时间周期内完成快速频繁正反转,使滚珠丝杠产生往返运行,带动造波板产生波浪,这一直是困扰我们的难题。
目前国内还没有一台自主研发的大功率伺服电机驱动的大型不规则波造波机,而国际上有此研制技术的国家也较少。本文结合实际成功的试验结果,阐述了系统的组成及工作原理,总结了理论计算与实测结果的统计规律,可为大波高造波机设计者提供一定的参考。
1 控制系统总体结构及工作原理
如图1所示,本造波机系统由上位机、内置CU310控制单元的运动控制器、伺服驱动器、电机及造波板等几部分组成。
上位机选用的是台湾研华生产的工控机IPC610系列,通过以太网与运动控制器组成一个小的局域网,主要完成各种波谱对应造波板运行轨迹数据的计算、控制命令的发送、采集处理各种实验数据以及造波机运行状况的监控;运动控制器选用SIMOTION D410,它是整个下位控制系统的核心部分,主要完成伺服电机各种运动方式的控制、CAM曲线的生成、上位机控制命令的执行和电机运行数据的采集,D410内部集成单轴控制单元CU310,可以控制1个驱动轴,既有高精度的速度控制功能,又具有简单定位功能,实现轴的相对和绝对定位,通过PROFIBUS现场总线,D410与CU310构成主从网络,D410为PROFIBUS主站(Master),CU310为从站(Slave),CU310和上位的SIMOTION控制系统结合在一起能实现同步、凸轮等复杂的运动控制功能;伺服驱动器选用与D410配套使用的SINAMICS S120驱动器,它集多种控制模式于一体,适合于单轴驱动,为电机提供功率驱动和伺服控制,SINAMICS伺服驱动器通过Drive-CLiQ接口将电机编码器数据取回,实时监测电机运行状态,并通过Drive-CLiQ接口将数据送给控制器,由控制器进行实时计算和修正,保证电机运行轨迹的准确性和平稳性,将电机运行状态实时地记录下来,提供给上位机调用,以便进行监控和故障处理;执行机构包括伺服电机和将旋转运动转换为直线运动的机械传动装置(滚珠丝杠),伺服电机是控制系统的控制对象,通过丝杠带动造波板做相应的造波运动,选用了 SIEMENS 1FT6168-8WB76-8AGO型号电机,其额定功率108 kW,额定扭矩690 Nm,额定转速1 500 r/min;造波板通过直线轴承安装在两个直线导轨上,通过连杆(推拉杆)与滚珠螺母滑板相接,滚珠丝杠通过联轴器与伺服电机的轴杆相连,当电机转动后,滚珠丝杠带动推板往返运动产生波浪。
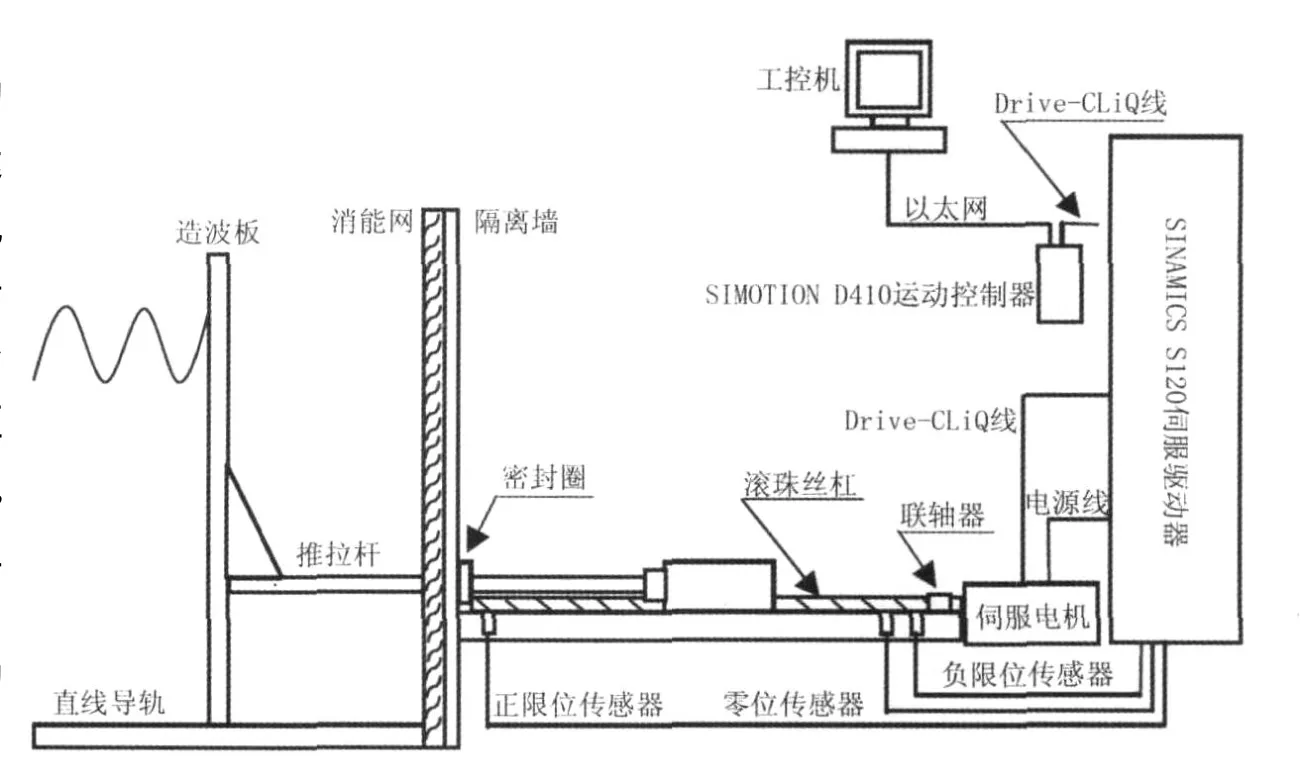
图1 造波机系统总体结构图
2 控制系统软件设计
本软件设计由上位机控制程序和下位控制器程序两部分组成。
上位机部分程序是基于Microsoft Visual C++6.0环境开发的,适用于Windows 2000、Windows XP和Windows Vista等Microsoft主流操作平台。包括仪器信息、采样设置、实验、数据处理、凑谱、网络控制和控制方式等主要菜单。其中,仪器信息主要是对采样设备—浪高仪进行标定以及对已标定好的浪高仪直接读入标定信息;采样设置包括采样通道,显示通道和采样长度的设置;实验菜单主要包括电机的使能、去使能、启动造波、停止造波、启动采样和停止采样等对实验过程的一系列控制;数据处理菜单条包括极值分析、统计分析、频谱分析、方向谱分析和过程曲线等一系列对所采集回来的数据分析处理的操作[4]。
下位控制器软件是基于SIMOTION SCOU T软件平台编写的,版本为V4.1.2。它提供了强大的配置、调试、编程和诊断功能,对控制器和驱动器的一切任务操作都可以在该软件里实现,从最初的添加硬件设备、配置设备以及设备间通讯到控制程序的实现都在这里完成。SCOU T软件提供了3种程序编写方法:梯形图、MCC运动控制框图和ST结构文本语言。于此,我们使用了MCC和ST两种编程语言。MCC(Motion Control Chart)是一种顺序执行的图形化编程语言,用来编写基本的运动控制程序。它提供了大量的图形化编程功能,降低了编程者工作的复杂程度。电机的使能、寻零和定位等功能均可通过模块化的函数进行调用实现,设置给定参数即可执行。MCC运动控制框图主要用来完成控制器的初始化、寻零、造波的过程控制和故障的处理,是整个下位控制程序的核心。ST结构文本,是种基于PASCAL的高级编程语言,符合IEC-6 1 1 3 1-3标准,主要用来声明使用的变量、CAM曲线的生成以及与上位机之间的通讯程序。
在SCOU T软件中,程序写好后需要将其分配到执行系统的不同执行任务中才能执行,否则所有的程序都只是逻辑上的,而并没有被执行系统真正执行。
SIMOTION中的执行系统管理着系统任务以及任务的有序执行。执行系统分为不同的等级,每个等级可包含一个或多个任务,每个任务中可分配一个或多个程序(由MCC或ST编写好的程序)。当多个任务在某一时刻同时开始执行时,任务之间就会有冲突。执行系统规定不同的任务具有不同的优先级,优先级高的任务先执行,正在执行的低优先级的任务可以被高优先级中断,直到高优先级的任务执行完才继续执行低优先级的任务。因此,可以将程序分配到不同的任务来指定程序的优先级或执行顺序。执行系统的任务优先级如图2所示。
其中,造波、寻零和故障处理程序分配在了运动任务里。通讯程序由于需要不间断接收上位机的命令,需要持续执行,将其分配到背景任务里,循环执行。电机状态,如:温度、位置、速度和扭矩等参数作为实时监测的变量,放在 IPO同步任务里,同步实时调用,以达到实时监测的目的。
在实验中,起动和停止都通过程序做了缓起与缓停处理,因此起动与停止过程平缓,不会因为起停时的输出扭矩过大而造成电机过流等情况。在造波过程中,电机的正反转与换向也都过渡平稳,在实时监测的电机状态中可看到电机运行过程状态良好。
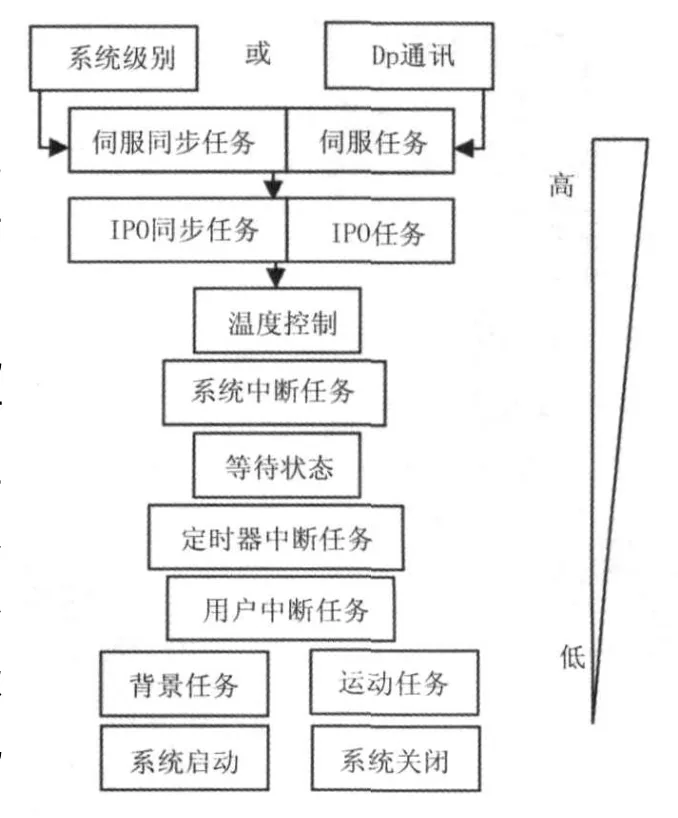
图2 执行系统的任务优先级
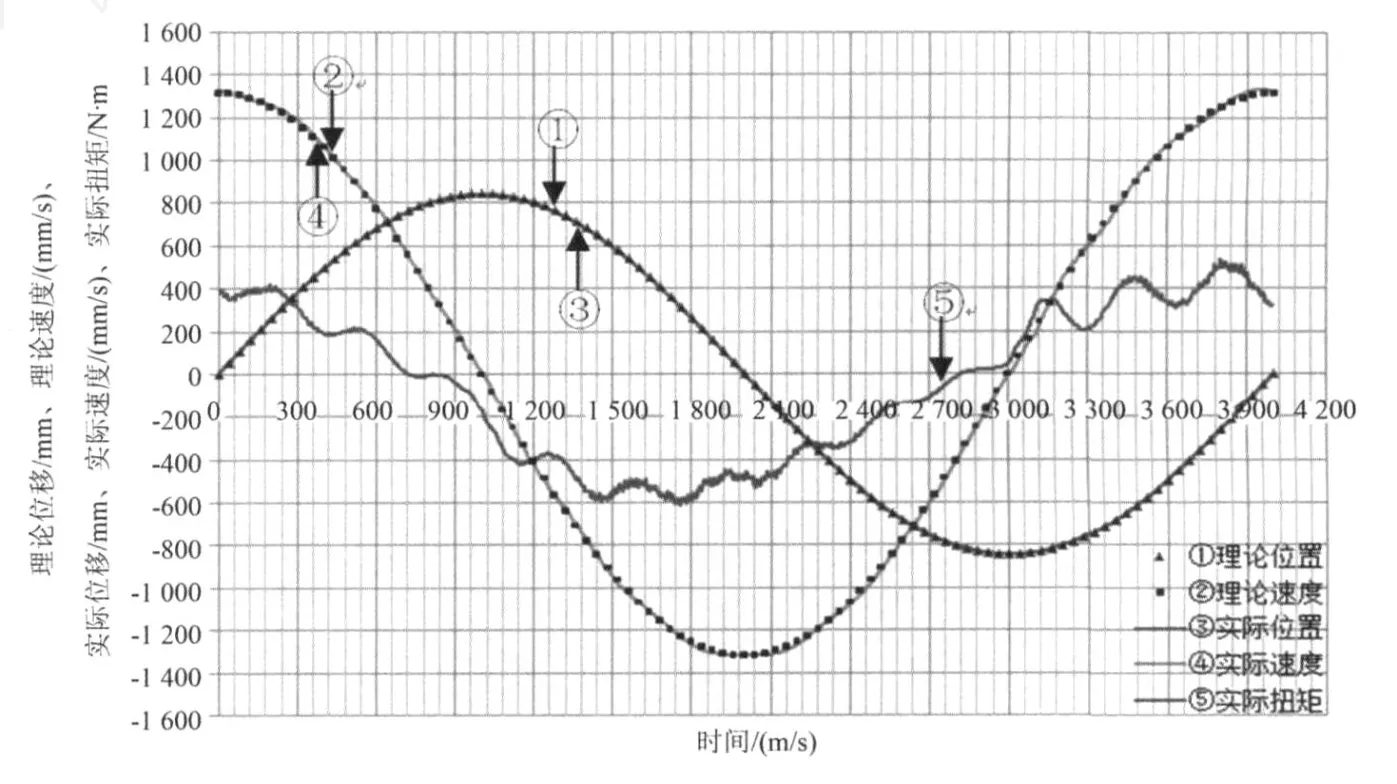
根据系统工作要求以及具体技术指标,我们做了大量的常规实验和极限性实验,以论证该系统的工作能力以及大功率伺服电机驱动大型造波机的可能性,并做了重复性实验,以确保数据的可靠性。虽然是实验平台,还有很多不完善,但测得的实际波高数据很令人满意,与理论值偏差很小,且在整个实验过程电机温度基本处于24度左右,比较稳定,说明电机工作状态良好。常规实验与极限波实验都达到了满意的效果。图3所示为波高1.15 m、周期4 s、水深1.6 m、造波板重量1 200 kg时的理论曲线与采样获得的实测曲线的对比图。从图中可以看到,电机的最大扭矩达到了610 N·m,而最大速度达到了1 316 mm/s,已经接近了我们设计的最大值,此时工作性能很好,在换向点处,实测速度与位置曲线平滑过度没有突变。位置曲线的实测值与理论值拟合得非常完美,误差极小。扭矩曲线突变较多,是因在每个控制时间周期内对已完成的定位和即将执行的定位进行计算调整引起的,是正常的修正过程,不影响整个位移曲线的走势。总体来说,已经满足了我们设计的使用要求。通常造波机的设计者,都是按照流体力学、机械结构计算去选择伺服电机的转矩和转速。这种理论计算
图3 理论与实际运行曲线对比图
3 可行性实验
是否符合大功率电机的应用,是我们最关心的问题。因此我们在大量实验之后,对数据进行了分析及对比,分别得到周期为2 s、3 s和4 s时电机实际输出扭矩与理论计算扭矩的比值随波高变化的关系。实际扭矩是通过采样分析数据获得的,做了大量重复实验,以确保数据的可靠性。理论扭矩则通过计算获得,计算方法如下:

式中:F推力为电机理论输出的总推力;F水为迎水面压强与背水面压强差造成的阻力和运动物体侧面流体相对运动时产生的摩擦阻力;F丝杠+联轴器为滚珠丝杠与联轴器部分产生的阻力;m造波板a为造波板加速度产生的推力。而 F水根据波浪造波理论,有

式中 Fr和FI分别为由于造波机产生的传播波浪和板前瞬态波浪对造波板产生的压力[5],可根据波浪造波理论计算,具体公式参考文献[5]。
而 F丝杠+联轴器所产生的扭矩可用公式(3)计算:

式中:ω为电机的角加速度;J联轴器为联轴器的转动惯量;J丝杠为丝杠的转动惯量。可通过公式(4)计算出联轴器与丝杠的转动惯量:

式中:L为长度;D为直径。丝杠的长度为2.5 m,直径80 mm。因此,经计算 J丝杠=0.079 kg·m2,J联轴器=0.022 kg·m2。
通过上述公式计算,得到了在不同周期与波高下的最大理论扭矩,并通过与实际采样扭矩最大值比较,得到了周期为2 s、3 s和4 s时实际扭矩与理论扭矩的比值随波高变化的关系,如图4所示。其中,周期2 s时波高取值为0.2 m~0.7 m;周期3 s时波高取值为0.2 m~0.9 m;周期4 s时波高取值为0.5 m~1.15 m。
对比以上曲线发现,在同一个周期下,波高越高,实际扭矩与理论扭矩比值越小,当波高较小时,比值较大,即在同一周期下,实际扭矩与理论扭矩比值随着波高的增加而减小;对比不同周期的曲线发现,随着周期的增加,这种实际扭矩与理论扭矩随波高的变化率越来越小,在4 s时,几乎呈水平线。此外,在相同波高下,周期越大,实际扭矩与理论扭矩越接近。周期4 s时,实际扭矩与理论扭矩比值基本在1附近,拟合较好。
这样,在我们关心的造波范围内,造波性能得到了满足,并且分析数据得到了实际扭矩随波高周期变化与理论扭矩的对应关系,更加方便了下一步的开发设计工作。
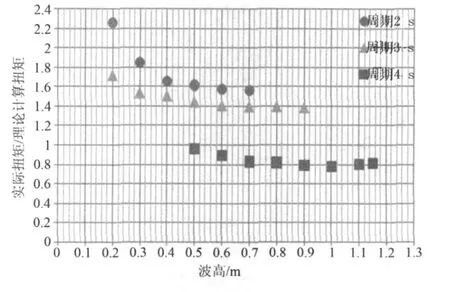
图4 波高-实际扭矩/理论扭矩曲线
4 结论
本文通过对SIEMENS大功率伺服电机的调试运行,构成了一套单板的大型造波机实验系统,不仅完成了功能性的设计工作,并且通过大量的实验证实了大功率伺服电机驱动大型造波机系统的可行性,为国内自主研发大功率电机驱动造波机奠定了基础,为以后进行多台电机同步调试,完成多板大型不规则波造波机系统的研制提供了依据和参考。
[1] 李木国,金乃高等.计算机技术在方向谱造波机控制软件中的应用[J].中国海洋平台.2001,(5-6):62-67.
[2] 金乃高.液压伺服多向不规则波造波机控制系统的设计与实现[D].大连:大连理工大学,2002.
[3] 李木国,张丰,王静等.基于Winsock类开发的造波机控制系统通讯软件设计[J].计算机工程与设计.2009,6:1536-1538.
[4] 王静,张群,李木国.基于网络控制的方向谱造波机系统[J].中国海洋平台.2007,22(3):52-54.
[5] Hughes S A.Physical Models and Laboratory Techniques in Coastal Engineering[M].World Scientific,1993.
Feasibility Study of High-Power Motor Applied to Wave-Maker Control System
LI Mu-guo, LIU Chuang, WANGJing, ZHANG Qun
(Dalian University of Technology,Dalian 116024,China)
TP29
A
1001-4500(2010)02-0018-04
2009-11-06
国家自然科学基金(50879098)资助项目
李木国(1953-),男,教授,主要从事网络运动控制、图像测量方向的研究。
