基于软组织环境的遥操作机器人系统广义预测控制
2010-08-24王捍兵曾庆军
王捍兵 曾庆军
(江苏科技大学电子信息学院,镇江 212003)
微创外科手术(MIS)技术兴起于20世纪80年代.它是外科医生在病人身体上开两或三个小孔(1cm左右),一个用于插入内窥镜,另一个或两个用于插入细长的手术工具,医生通过监视器观察插于病人体内的工具端部运动来进行相对简单的外科手术.遥操作机器人(tele-manipulation robot)是指在人的操纵下能在人难以接近(距离遥远、对人有害或操作有难度)的环境中完成比较复杂的精细操作的一种远距离操作系统[1-2].
将遥操作机器人技术与MIS技术结合,所开发的遥操作机器人微创外科手术系统(TMIS)使外科医生能进行复杂手术、提高手术质量和进行手术模拟训练,使用于微外科医疗的遥操作机器人技术成为非常重要的机器人应用技术之一[3].1994—1997年美国分别研制出医用机器人“伊索(Aesop)”、主从式机器人“宙斯(Zeus)”和“达芬奇(Da Vinci)”等遥操作外科手术机器人,并已成功应用于心外科、普外科和胸外科等微创手术中[4].此外,我国自主研制的首台微创外科手术机器人“妙手A(McroHand A)”也于今年七月通过了成果鉴定.
软组织环境特别是人体器官软组织是TMIS的操作对象,具有复杂的非线性特性[5].在遥操作机器人微创手术过程中,由呼吸运动产生的周期性组织形变将严重干扰外科医生对机器人的操作.人体内的生理运动主要有两个来源:呼吸运动和心跳.其中呼吸运动是主要的干扰源.它使胸腹部的多数组织产生较大的周期性位移运动.在手术过程中,这种周期性运动会对医生产生很大干扰,尤其在进行精确度较高的手术(如插针、缝合)时,外科医生必须能够很好的消除这种周期性的扰动[6].
本文针对面向微创手术的遥操作机器人系统中由呼吸运动和心跳产生的周期性扰动设计了一种新颖的广义预测控制方案.通过MATLAB仿真实验表明,系统在非线性软组织环境模型下能够较好的消除这种周期性扰动,并验证了本控制方案的有效性和鲁棒性.
1 遥操作机器人系统
1.1 系统构成及工作原理
遥操作机器人系统由操作者、主机械手(简称主手)、通讯环节、从机械手(简称从手)和环境构成,如图1所示.一方面,操作者通过操纵主手产生运动,其运动信息经通讯环节送至从手的控制端,使其产生相同的运动,跟踪主手运动,即位置跟踪;另一方面,当从手与环境相互作用时,环境对从手的作用力反馈至主手处并作用于人手,使操作者感受到作用力,即力跟踪,从而使整个系统构成一个反馈的闭环系统.

图1 遥操作机器人系统框图
本文研制的单自由度遥操作机器人系统的构成如图2所示.
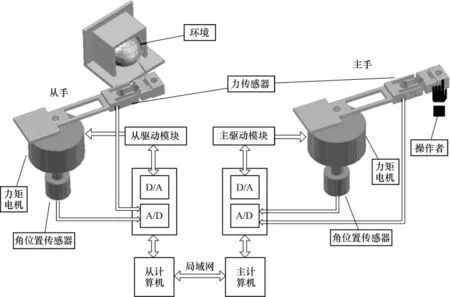
图2 单自由度遥操作机器人系统的构成示意图
该系统的工作原理如下:首先操作者操作主手运动,安装在主手上的角位置传感器将主手的位置信息通过A/D变换后传给主计算机,主计算机将位置信号通过通讯环节传给从计算机,从计算机按照一定的控制算法得到位置控制信号,位置控制信号经D/A变换后驱动从手的力矩电机控制从手运动,从而使从手实时跟踪主手运动.当从手作用于环境时,安装在从手上的力传感器将从手与环境的作用力经过A/D变换后传给从计算机,主计算机获得从计算机传送过来的从端的力信号后按照一定的控制算法得到力控制信号,力控制信号经D/A变换后驱动主手的力矩电机,从而使操作者实时感受到从手与环境的作用力.
1.2 系统动力学模型
本文研究的单自由度主从式遥操作机器人系统的各环节动力学模型如下:
1)操作者

式中,Fh为操作者肌力;Fm为主手与操作者之间作用力;Xm为主手位置;Mh为操作者手臂质量系数;Bh为操作者手臂阻尼系数;Kh为操作者手臂刚度系数.
2)主手

式中,τm为主手电机驱动力;Mm为主手质量系数;Bm为主手阻尼系数.
3)从手

式中,τs为从手电机驱动力;Fe为从手与环境之间作用力;Xs为从手位置;Ms为从手质量系数;Bs为从手阻尼系数.
4) 环境[7]
本文采用经实际活体实验受力曲线而拟合的动力学模型进行控制策略的仿真研究.
图3为针插入实际猪肝过程中的受力曲线(在活体中),虚线是实际测量曲线,实线是经过辨识的曲线,即拟合的曲线.动力学模型为

式中,F(xs)为插针过程中软组织环境对手术针轴向的作用力;d0是针插猪肝的起始位置,设为常数;d1是针刺破猪肝膜的位置;参数f0,f1,a0,a1,b0,b1为与软组织机械特性有关的常数.
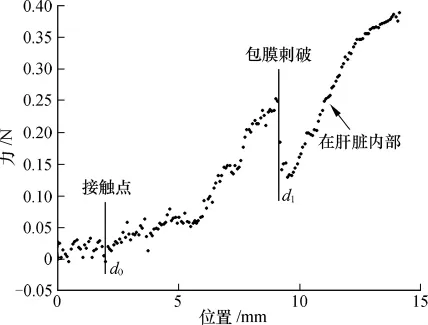
图3 手术针与软组织环境接触过程中位置与力关系曲线
2 遥操作机器人系统主从控制器设计
本文的遥操作机器人系统控制结构如图4所示,操作者操纵主手,主力传感器接受操作者施加的力,与从力传感器反馈回来的经放大的力信号相减,力差经控制器后产生主手力矩电机的控制信号.主手运动时,角位移传感器检测到位移信号,缩小后与从手位移传感器检测到的从手位移信号一起输入到从手广义预测控制器,从而产生从手力矩电机的控制信号.当接触到物体时,从力传感器返回受力信息,使主手驱动信号减弱,因而操作者感受到操作力;同时主手位移减小,减弱了从手的驱动信号,使操作手末端位移减小.操作者通过加力减力来控制操作过程完成操作.
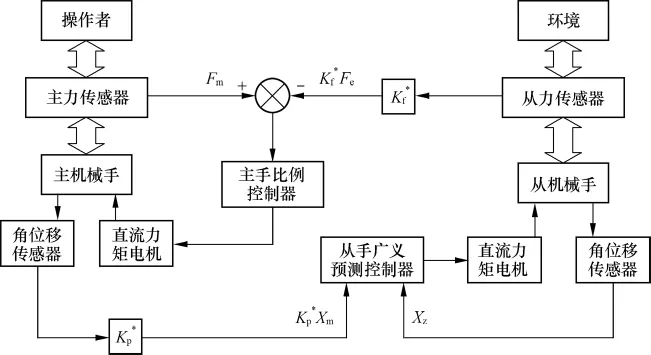
图4 遥操作机器人系统控制结构图
理想控制效果为:当从手未与环境接触而作自由运动时(fe=0),应实现从手对主手的位置跟踪,即要求xs=xm;当从手与环境稳定接触时(˙xs=0),应在主手感觉到从手所受的力,即要求fm=fe.
2.1 主手控制器设计
结合力反馈-位置型控制结构,在主端根据性能要求,选择如下比例控制律:

2.2 从手广义预测控制器设计
2.2.1 广义预测控制[8-9]
在广义预测控制中,采用受控自回归积分滑动平均模型(controlled auto-regressive integrated moving average,CARIMA)来描述具有干扰的被控过程,如下式所示:

式中,A(z-1),B(z-1)和 C(z-1)分别为 n,m 和 n 阶的 z-1的多项式;u(t),y(t)分别表示被控对象的输入和输出;d表示被控对象时延;ω(t)本文中采用的是均值为零的白噪声序列.
假设参考序列yr(t+j)是可知的,j=1,2,…为预测步数.广义预测控制的任务就是使被控对象的输出y(t+j)尽可以地靠近yr(t+j).
性能指标函数为

式中,Δu(t+j)=0;N1为最小预测时域;N2为最大预测时域;Nu为控制时域;λ为控制加权常数.
2.2.2 广义预测控制器设计[10]
在从端根据滚动优化和反馈校正的原理,选择如下广义预测自适应控制律:

其中
采用如下的递推最小二乘法估计模型参数:
3 遥操作机器人MATLAB仿真实验和结果
使用MATLAB中的SIMULINK仿真工具进行仿真.在SIMULINK中建立仿真框图,将广义预测控制算法编写成S函数作为系统中的预测控制器.
系统有关模型及参数如下[6],操作者为

主从手模型为

其中,d=3为系统纯时延.

环境采用式(4)模型,参数如下:
[f0;a0;b0;d0]=[0.2;0.121; -0.098;11.45]; [f1;a1;b1;d1]=[-3.39; -0.031;1.7;19.65]选择预测控制器参数[N1;N2;Nu;Ts]=[1;15;5;0.08].
输入参考轨迹为t=5 s处,振幅5的阶跃信号,模拟外科医生手术时进行的操作.
周期性干扰信号为振幅0.5的方波信号,模拟由呼吸运动产生的周期性组织位移.
3.1 开环主从手位置跟踪实验
在SIMULINK主从手遥操作机器人开环主从手位置跟踪仿真框图中,参考信号输入主手控制器后,经广义预测控制算法得到控制信号,输出至从手控制器.
仿真运行后得到图5遥操作机器人主从手开环位置跟踪曲线.由图中曲线可知,在周期性的方波干扰信号下,系统可减小干扰影响,并能使从手很好的跟随主手运动.
3.2 闭环主从手位置-力跟踪实验
SIMULINK中主从手遥操作机器人闭环主从手位置-力跟踪仿真框图主要是在图5主从手位置跟踪仿真框图的基础上加上从手的力反馈,从而形成闭环控制.
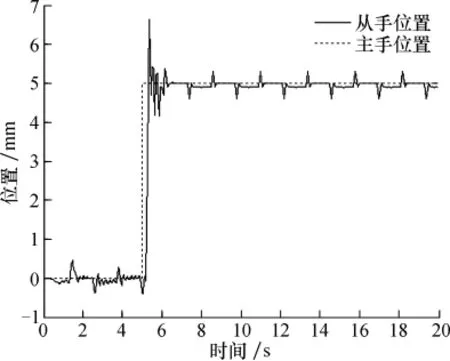
图5 开环主从手位置跟踪曲线
仿真运行后得到主从手闭环位置跟踪曲线如图6和图7所示.由图7可知,主手可很好的跟踪从手所受的力,从而使操作者能够在操作主手时感受到从手端与环境之间的力作用.
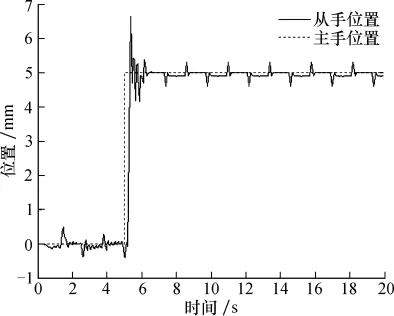
图6 闭环主从手位置跟踪曲线
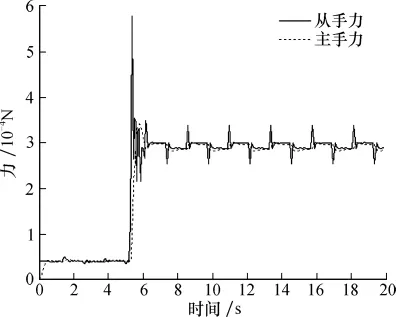
图7 闭环主从手力跟踪曲线
4 结语
在遥操作机器人微创外科手术(TMIS)中,由于呼吸作用等产生的周期性扰动幅值较大,对外科医生手术造成很多不确定的影响.由仿真实验表明本文设计的广义预测控制方案能够减小扰动幅度,并使从手能够很好的跟踪主手曲线.另外,本文所取仿真时延较小,因此针对大时延的控制策略还需进一步研究.在本文所做的仿真实验基础上,下一步准备将本文设计的广义预测控制方案应用在实际的主从手实验系统中,并验证其可行性.
References)
[1]杜志江,孙立宁,富历新.医疗机器人发展概况综述[J].机器人,2003,25(2):182-187.Du Zhijiang,Sun Lining,Fu Lixin.An overview of medical robots[J].Robot,2003,25(2):182 -187.(in Chinese)
[2] Arata J,Mitsuishi M,Warisawa S,et al.Development of a dexterous minimally-invasive surgical system with augmented force feedback capability[C]//Proc of IEEE/RSJ International Conf on Intelligent Robots and Systems.Edmonton,Canada,2005:3207-3212.
[3] Tavakoli M,Patel R V,Moallem M.A haptic interface for computer-integrated endoscopic surgery and training[J].Virtual Reality,2006(9):160-176.
[4] Makoto Hashizume,Kouji Tsugawa.Robotic surgery and cancer:the present state,problems and future vision[J].Japanese Journal of Clinical Oncology,2004,34:227-237.
[5]刘少强,黄惟一,王爱民,等.用于微创外科手术的遥控机器人系统研究现状及趋势[J].机器人,2002,7(2):283-287.Liu Shaoqiang,Huang Weiyi,Wang Aimin,et al.Overview of the state of arts on control of scaled telemanipulated system for minimally invasive surgery[J],Robot,2002,7(2):283-287.(in Chinese)
[6] Gangloff Jacques,Ginhoux Romuald,de Mathein Michel,et al.Model predictive control for compensation of cyclic organ motions in teleoperated laparoscopic surgery[J].IEEE Transactions on Control Systems Technology,2006,14(2):235-246.
[7]徐晶晶,陈孝凯,曾庆军.遥操作机器人系统软组织环境触觉建模实验[J].江苏科技大学学报:自然科学版,2010,24(1):79-82.Xu Jingjing,Chen Xiaokai,Zeng Qingjun.Soft tissue environment haptic modeling for tele-manipulation robot system[J].Journal of Jiangsu University of Science and Technology:Natural Science Edition,2010,24(1):79-82.(in Chinese)
[8]王伟.广义预测控制理论及其应用[M].北京:科学出版社,1998.
[9]郭旭,熊蓉,胡协和.全方位移动机器人的运动预测控制[J].电机与控制学报,2007,11(1):79-82,87.Guo Xu,Xiong Rong,Hu Xiehe.Motion predictive control of omni-directional mobile robot[J].Electric Machines and Control,2007,11(1):79-82,87.(in Chinese)
[10]曾庆军,王捍兵,徐晶晶.基于软组织环境的遥操作机器人系统预测控制研究[C]//第29届中国控制会议(待发表).Zeng Qingjun,Wang Hanbing,Xu Jingjing.A study on generalized predictive controller for tele-manipulation robot system with soft tissue environment[C]//The 29th Chinese Control Conference(to appear).(in Chinese)