空间柔性机械臂运动功能可靠性分析
2010-08-23冯嘉珍贾庆轩孙汉旭
冯嘉珍,贾庆轩,孙汉旭
FENG Jia-zhen, JIA Qing-xuan, SUN Han-xu
(北京邮电大学 自动化学院,北京 100876)
0 前言
空间机械臂具有适应太空恶劣作业环境的能力,采用机械臂协助或代替宇航员完成一些太空作业在经济性和安全性两方面都具有现实意义,已成为当前空间技术领域的重要研究方向。与地面机械臂相比,空间机械臂具有微重力、大跨度、轻质量、大自重比和低阻尼的特点,因此在对空间机械臂进行动力学分析时必须考虑臂杆的柔性问题。
此外,传统的动力学研究中[1],将研究对象视为确定性系统,相应的动力学计算结果也是确定性的,但是这与工程实际并不相符。如设计公差、制造装配误差等导致零部件的几何尺寸存在不确定性;材料参数如弹性模量、密度等有时不能精确确定。由于这些参数的影响,系统的动力学响应也呈现出不确定性。因此,为了更加精确的描述空间柔性机械臂的动力学行为,有必要考虑不确定性参数的影响。
将可靠性技术和空间柔性机械臂动力学研究相结合,分析、计算机械臂的运动功能可靠性,目前这方面的研究相对比较薄弱。Rio[2]等人对机械臂的可靠性进行了研究,但是并没有计及机械臂的柔性。何柏岩[3]的研究虽然考虑到了机械臂的柔性,但他在进行可靠性计算中,采用了计算效率低下的简单蒙特卡罗法,导致计算的时间成本过高。
本文以单连杆空间柔性机械臂为研究对象,在综合考虑不确定性因素和弹性变形的基础上,利用Lagrange方法建立机械臂的动力学模型。然后,依据计算效率更高的响应面法开发计算程序,对空间柔性机械臂的运动功能可靠性进行了分析计算。
1 空间柔性机械臂动力学分析
在单一平面XOY内做旋转运动的单连杆空间柔性机械臂如图1所示。
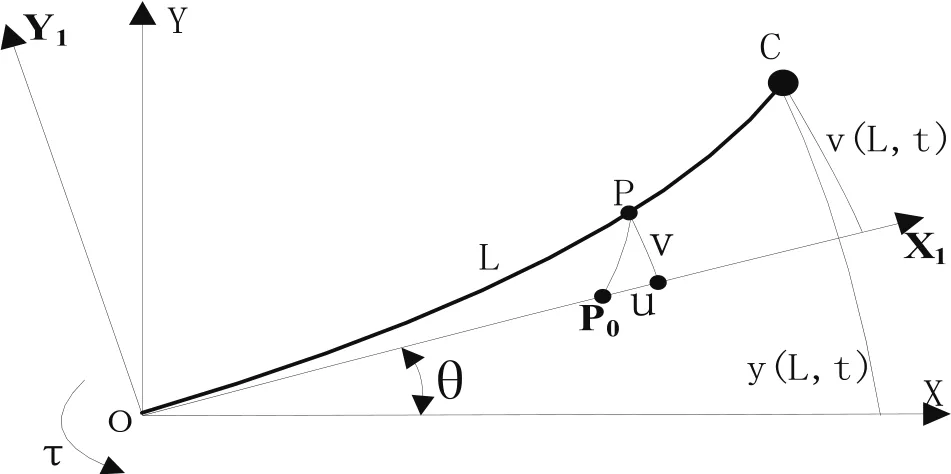
图1 空间柔性机械臂结构简图
其中,机械臂长为L,臂横截面宽度为h1、高度为h2,横截面积为A,横截面惯性矩I,密度为ρ,弹性模量E,固定端转动惯量Jh,电机驱动力矩为 ,关节转角为θ。XOY为惯性坐标系,X1OY1为浮动坐标系。机械臂发生弹性变形时,其轴线不可伸缩,且变形满足小变形假设。
设P0是没有产生变形时,机械臂上的任意一点,其在浮动坐标系X1OY1中的坐标为(x,0)。当机械臂发生了如图1所示的变形之后,点P0运动到了点P的位置,其轴向位移和横向位移分别为u(x,t)、v(x,t)。
点P在惯性坐标系下的坐标为

说明,为了便于编程计算,将P的坐标表示成向量的形式,并以来表示。同时,为了表达简洁,用上标点表示对时间进行求导。
空间柔性机械臂的总动能为

空间柔性机械臂的总势能为

对轴向不可伸长的Euler-Bernoulli梁模型,如忽略轴向变形,则由于横向变形v(x,t)引起的轴向位移u(x,t) 之间存在如下关系式[4]

根据假设模态法,机械臂的横向变形v可以表示为一组模态振型和模态坐标的线性组合

其中,φi(x)为机械臂的第i阶模态振型,qi(t)为第i阶模态坐标,n为模态阶数。由文献[5]可知,一阶模态在弹性振动中占据了绝大部分的比重。所以,在推导动力学模型时可以仅保留一阶弹性模态。
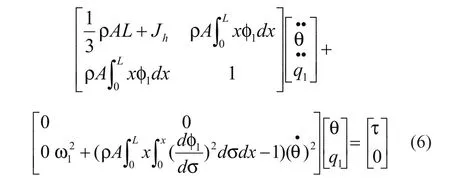
将 (4)、(5) 式代入(2)、(3) 式,并忽略模态坐标及其速率高于二阶的高阶小量,利用Lagrange方程可得空间柔性机械臂的动力学方程如下(仅保留一阶模态)
2 响应面法及程序流程
由应力-强度干涉理论可以推导出系统运动功能失效的概率为[6]

其中,fX(x1,x2,…,xn)为概率密度函数(xi为系统的基本随机变量),g(X)=g(x1,x2,…,xn)为运动功能函数。若g(X)>0,系统运动可靠;若g(X)≤0,则运动失效。
如果功能函数g(X)已知,就可直接利用上式计算可靠度。但在实际情况中,由于系统的复杂性,难以利用基本随机变量将功能函数直接表示出来,所以利用式(7)计算可靠度是不现实的。一种解决方案就是构造一个近似的功能函数g’(X)来代替真实的g(X),从而使可靠度的计算得以实现,这就是响应面法的本质。
具体来讲,响应面法是在设计验算点附近拟合响应面,用插值技术确定近似功能函数g’(X);然后利用一次二阶矩法计算出可靠度指标β和可靠度R;之后通过线性插值获得新的展开点,构造新的响应面函数。如此进行不断的迭代,逐步逼近真实的可靠度值。
该方法的具体程序流程如图2所示。
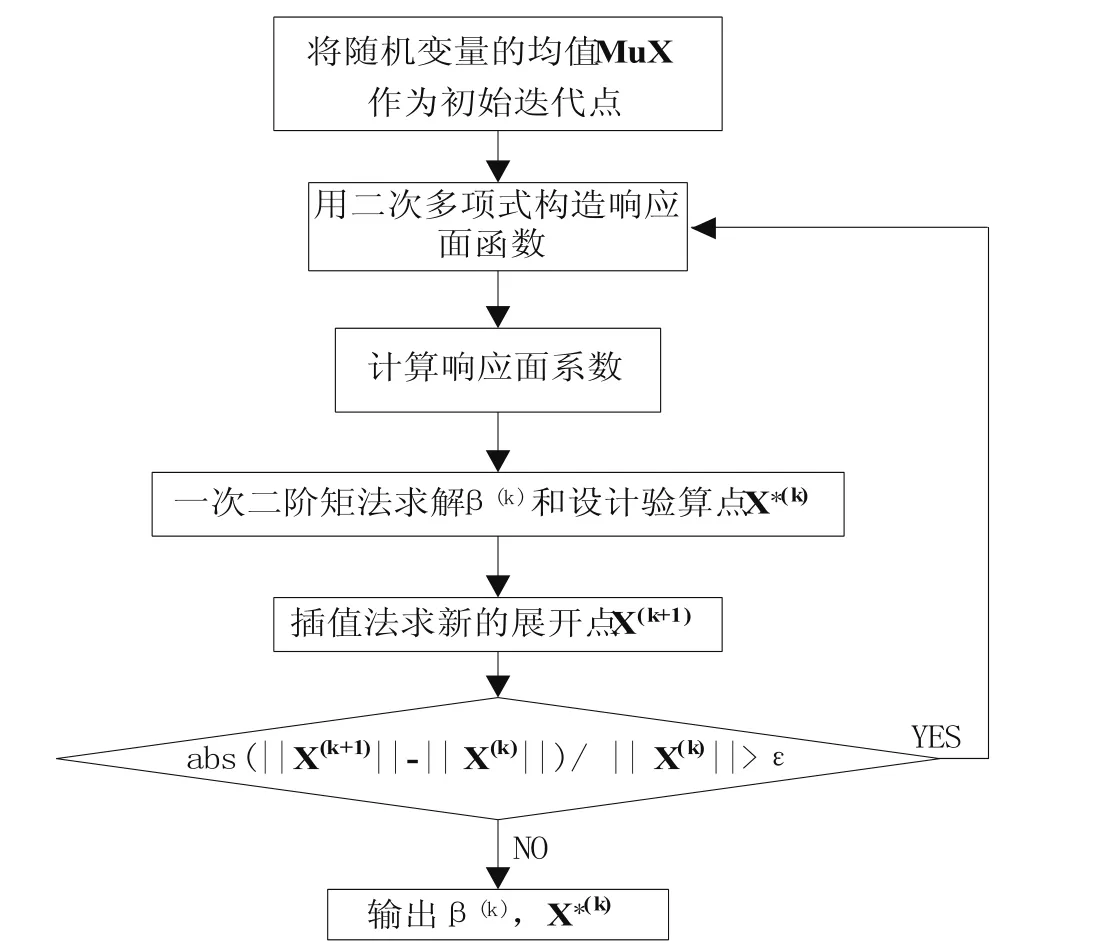
图2 响应面法计算流程图
3 空间柔性机械臂运动功能可靠度计算
空间柔性机械臂的几何尺寸、材料参数(密度、弹性模量等)甚至边界条件等均存在不确定性。在数学上,不确定性可分为随机性、模糊性、未确知性三类[7],此处仅讨论参数的随机性。
选择机械臂的长L、宽h1、高h2以及密度ρ为基本随机变量,并假设这些随机变量均符合正态分布[3],其均值分别为:0.53 m、0.032 m、0.00085 m、7800 kg/ m3;标准差分别为:0.0053、0.00032、0.0000085、78。机械臂的弹性模量E=2.1*1011N/m2,转动惯量Jh=0.0146 kg*m2,电机驱动力矩τ=1-t (0≤t≤2),单位N*m。
t时刻,空间柔性机械臂末端C点的位移如图1所示。其中,v(L,t)为机械臂末端C点的横向变形。则C点的位移y(L,t)等于将柔性机械臂视作刚性臂时的位移Lθ与v(L,t)之和。

对于空间柔性机械臂来说,考虑到其末端在规定时间内能运动到预先设计的位置,列出功能函数如下

其中,[y(L,2)]为t=2s,即电机停止工作瞬间,机械臂末端C点位移的许用值,y(L,2)为实际值,可利用Matlab求解空间柔性机械臂动力学方程得出。
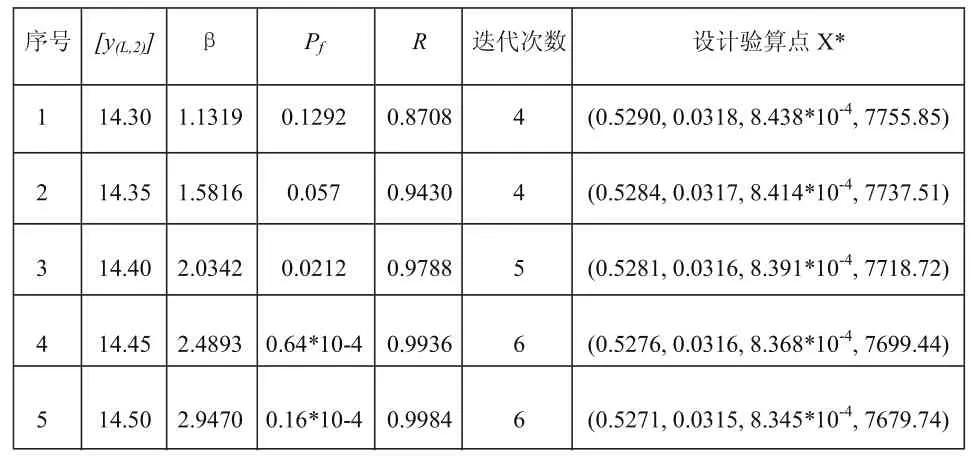
表1 柔性机械臂运动功能可靠性分析结果
响应面函数为

分别取[y(L,2)]为14.30, 14.35, 14.40, 14.45,14.50(单位m),利用自行编写的可靠性分析程序进行空间柔性机械臂运动功能可靠度的计算。所得结果如表1所示。表中,β为可靠度指标,Pf为失效率,R为可靠度,X*为设计验算点。
4 结论
1)根据表1中的试验结果可知,在基本随机变量数目较少的情况下,响应面法迭代次数少、收敛快、计算效率高,是对机构开展运动功能可靠度计算的一种行之有效的手段。
2)本文在计算过程中,做了较多的简化措施,忽略的因素比较多,这在进行一般性的可靠性分析时是可以接受的。当要求较高时,一方面尽可能将影响柔性机械臂运动功能可靠性的主要不确定性因素都考虑在内,比如边界条件和载荷的不确定性,甚至电机输出力矩的不确定性也要考虑;另一方面,针对不同性质的不确定性因素,采取不同的方法进行处理,比如密度要当作随机场来处理,而电机输出力矩则要当作随机过程来对待。
[1]刘又午.多体动力学的休士顿方法及其发展[J].中国机械工程,2000,11(6):601-607.
[2]Rao S.S.,etc,Probabilistic Approach to Manipulator Kinematics and Dynamics[J].Reliability Engineering and System Safety,2001,72(1):47-58.
[3]何柏岩.柔性多体系统的广义确定性动力学模型及其仿真研究[D].天津:天津大学,2003.
[4]刘才山,刘又午.柔性机械臂的动力学模型及滑膜变结构控制[J].振动与冲击,1998,17(1):25.
[5]宋建龙.柔性机械臂动力学建模与仿真研究[D].天津:天津大学,2001.
[6]张建国,苏多.空间柔性机构运动可靠性分析[J].北京航空航天大学学报,2006,32(1):123.
[7]王光远.论不确定性结构力学的发展[J].力学进展,2002,32(2):205-211.
