基于模糊控制MPPT的单相光伏并网发电系统
2010-08-13凌六一
凌六一
(安徽理工大学 电气与信息工程学院,安徽 淮南232001)
能源短缺和环境污染己成为制约人类社会可持续发展的两大重要因素,大力发展新的可替代能源己成为当务之急。光伏发电作为一种新的电能生产方式,以其无污染、安全、资源丰富、分布广泛等特点显示出广阔的发展空间和应用前景。为了充分提高光伏发电系统的能量转化效率,必须采用适当的最大功率点跟踪MPPT(Maximum Power Point Tracking)算法控制光伏发电变换器,使系统保持运行在光伏阵列最大功率点附近。常用的光伏阵列最大功率点跟踪算法包括固定电压法[1]、扰动观察法[1-3]、爬山法[4]和导纳增量法[5]等,但这些方法在实际使用中存在不同的缺点,跟踪效果不理想、硬件实现复杂。由于光伏阵列具体的数学模型不明确,无法掌握环境温度和日照强度的变化规律,使得跟踪系统存在较高的复杂性和模糊性。为此,本系统运用模糊自寻优方法来实现光伏阵列最大功率点的跟踪。
1 光伏电池特性
目前光伏系统中使用的太阳能电池多为硅太阳电池,参考文献[6]给出了其输出电压、电流的关系方程:

式中,IL为光生电流;IO为反向饱和电流;q为单位电荷(1.6×10-19);A为理想因子, 一般介于 1~2之间;K为波尔兹曼常数 (1.38×10-23);T为光伏电池温度;U为光伏电池输出电压;Rs为光伏电池等效串联电阻;Rsh为光伏电池等效并联电阻。
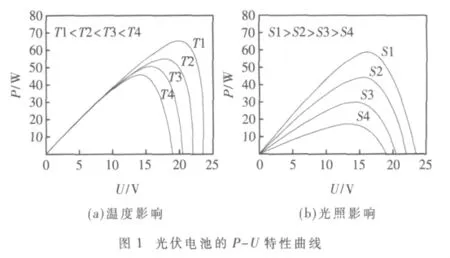
光伏电池阵列输出具有明显的非线性特征,图1所示为光伏电池的输出功率-电压(P-U)曲线。由图1可见,光伏电池输出功率受光照强度S及电池温度的影响较大。当光照强度增加时,电池开路输出电压变化不大,短路电流明显增加,最大输出功率增加;当温度增加时,电池开路输出电压下降,短路电流略有增加,最大输出功率减小。在一定的光照强度和电池温度下,光伏电池在某点输出电压上,可使其输出功率达到最大值,这点就是光伏电池的最大功率点(对应P-U曲线的最高点)。
2 光伏发电系统结构组成与功能实现
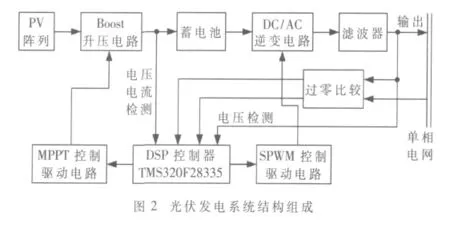
光伏发电系统主要由DC-DC(Boost升压电路)和DCAC两级变换器构成,整个系统的控制核心采用浮点型DSP控制器 TMS320F28335,如图2所示。其中,Boost升压电路主要是提高光伏电池阵列的功率转化效率,对光伏电池阵列进行最大功率点跟踪,并且把光伏电池阵列输出的电压提升为能满足逆变并网要求的直流母线电压。DC-AC逆变器在SPWM信号驱动下完成将直流电逆变成与电网电压同幅同频的单相交流电,使并网电流与电网电压同相位,提高了功率因数。
2.1 模糊控制的MPPT实现
由图1可见,在不同的温度和光照强度下,光伏电池最大输出功率的位置是不同的。当光伏电池工作在最大功率点左侧时,控制系统应增大光伏电池的输出电压;而当工作在最大功率点右侧时,反而要减小光伏电池的输出电压。因此,控制系统需不断检测并判断输出功率的变化,以调整光伏电池的输出电压,从而使其工作点不断向最大功率点移动。可见,实现MPPT的实质为动态自寻优过程,其控制策略为实时检测光伏阵列的输出功率,采用一定的控制算法预测当前情况下光伏电池可能的最大功率输出,通过改变光伏电池的输出电压来满足最大功率输出的要求。为此采用了图3所示的Boost升压变换电路。
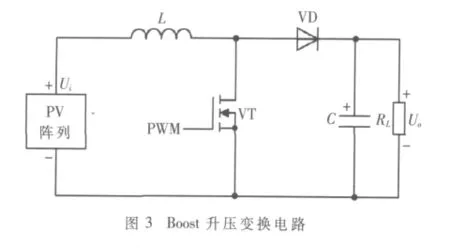
Boost升压变换电路输入电压与输出电压之间的关系为:

图3中的负载RL实际为蓄电池,因此Uo的值就被钳制为蓄电池两端的电压。由式(2)可知,当改变PWM占空比D时,Ui则跟着变化且与D成反比。所以,通过控制D就能找到最大功率点所对应的电压Ui,从而使光伏电池输出最大功率。
由于光伏阵列具体的数学模型不明确,无法掌握环境温度和日照强度的变化规律。因此,系统存在较大的复杂性和模糊性,在此运用模糊自寻优方法来实现最大功率点的跟踪。
2.1.1 确定模糊控制器输入输出
由式(1)可知,输出功率随输出电压的变化率 dP/dU是输出电压U的单调函数,当输出电压U变化时,dP/dU也随着变化,在最大功率点上dP/dU为0。当输出电压U不同时,dP/dU的大小和变化率也不同。因此,可根据dP/dU的大小和变化率调节PWM的占空比D。所以,将式(3)中的e(n)和 Δe(n)作为模糊控制器的两个输入;将PWM占空比D的变化量ΔD(n)作为模糊控制器的输出。 e(n)、Δe(n)和 ΔD(n)分别为:

式中,Pn、Un分别为 n时刻光伏电池的输出功率和输出电压;D(n)为n时刻的PWM占空比。
2.1.2 确定模糊集和隶属度函数
将e(n)和Δe(n)的模糊语言变量定义为 7个模糊子集 ,即 e(n),Δe(n)={NB,NM,NS,ZO,PS,PM,PB},对 应的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};将ΔD(n)模糊语言变量定义为 5个模糊子集,即 ΔD(n)={NB,NS,ZO,PS,PB},对应的论域为{-10,-6,-3,0,3,6,10}, 其 中 NB、NM、NS、ZO、PS、PM、PB 分 别 表示 负大、负中、负小、零、正小、正中和正大。
由于隶属函数曲线的形状越尖,相应模糊集合分辨率越高,控制灵敏度也越高。同时为了使模糊化算法简单,提高控制实时性,模糊集合的隶属函数取为三角形对称分布,如图4所示。
2.1.3 确定模糊控制规则
制定模糊控制规则遵循的基本原则:当误差大或较大时,控制量输出以尽快消除误差为主;当误差较小时,控制量输出要注意防止产生超调,以系统的稳定性为主。模糊控制规则应用IF-AND-THEN规则,模糊控制规则如表1所示。
对于给定e(n)和Δe(n),模糊控制器通过Mamdani极大极小值推理法进行推理得到ΔD(n),解模糊采用加权平均法,加权因子取为组成模糊控制向量的元素自身的隶属度。

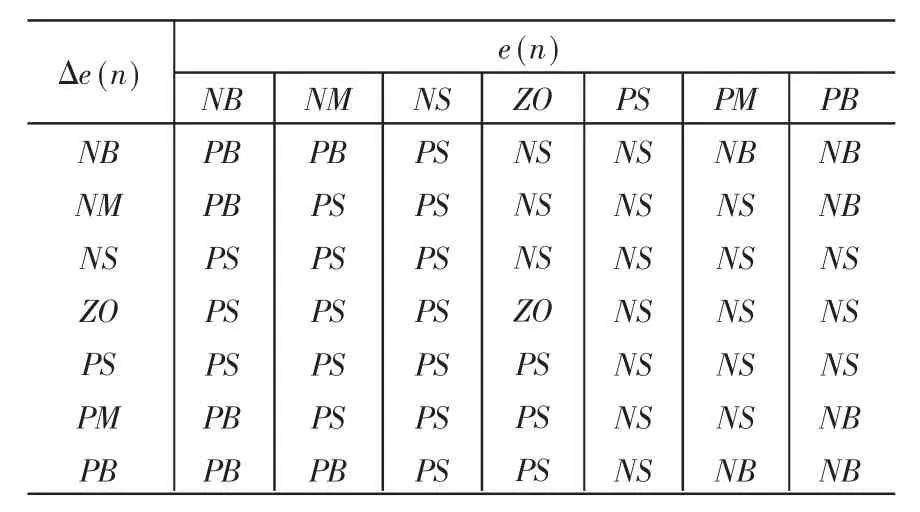
表1 求解ΔD(n)的模糊控制规则
2.2 逆变并网实现
光伏发电并网系统要求逆变器的输出波形为正弦波,输出电流与电网电压同频同相,因此其控制策略与一般独立的电压型逆变器的控制策略有所不同,需考虑频率、相位跟踪问题。本系统采用的DC-AC逆变主电路采用全桥结构,输出经滤波后为220 V/50 Hz的工频交流电,如图5所示。

2.2.1 SPWM波形的生成
正弦脉宽调制(SPWM)作为一种常用的调制技术被广泛应用于逆变电路中,本系统采用双极性SPWM调制来实现DC-AC变换。对于图5中的开关管,要求VT1、VT4和VT2、VT3轮流导通,因此只需两路成互补SPWM波即可。为此,利用TMS320F28335的ePWM模块中的ePWM1来产生两路互补对称的SPWM波,分别从ePWM1A和ePWM1B脚输出,同时还可实现死区控制,避免上下两管同时导通。具体波形产生过程为:设置ePWM1的时基计数器为连续增减方式,计数周期为载波周期的1/2。在计数的过程中,比较寄存器 CMPA(和CMPB)与计数值不断比较,当数值匹配时,ePWM1A(和 ePWM1B)引脚电平翻转,由于在增计数和减计数过程中数值匹配分别发生1次,即在1个周期内翻转 2次,所以产生对称的PWM波形。只要在每个PWM周期根据在线计算改写比较寄存器的值,就可实时改变脉冲占空比,从而形成完整的SPWM波。其中,比较寄存器内容实时更新的公式为:

式中,Tc为载波周期;M为调制比;N为载波频率与输出正弦波频率的比值。
2.2.2 频率跟踪与相位同步实现
标准的电网频率为50 Hz,通常情况下,实际频率会有小范围的波动。对此,必须采取措施控制光伏并网系统输出电流,使其对电网电压进行频率跟踪和相位同步。本系统采用软件锁相实现对同步的要求。
实现频率跟踪,首先要检测电网的工作频率。可将电网电压通过过零比较电路,变成与之同相位的方波信号,作为TMS320F28335捕获单元ECAP1的捕获事件,连续2次捕获时的计数差值就是被测电网电压信号的周期值。然后,在下一个SPWM周期,更新N与比较寄存器CMP的值,使逆变器输出与电网同频的正弦波形。考虑到逆变器后级滤波器的设计,Tc固定不变,因此,N随电网频率的变化而变化。
要实现相位同步,可再将逆变器的输出通过过零比较变成方波后,作为捕获单元ECAP2的捕获事件,通过计算ECAP2、ECAP1相邻2次捕获时的计数差值,得到的就是两者信号的相位差,然后根据此值去调整比较寄存器首个数据的位置,即调整正弦波形输出的起点,最终使逆变器输出与电网同相位。
3 实验结果
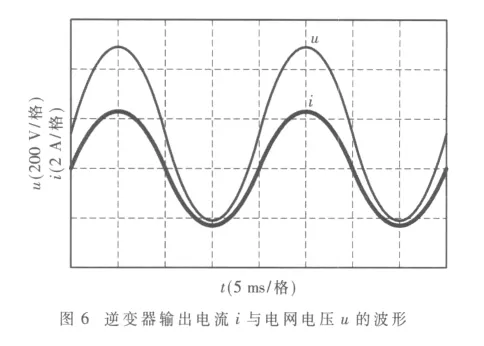
根据图2的系统组成结构图,设计了系统的硬件并进行相应的算法验证。实验采用了160 V/480 W的光伏电池阵列、396 V/40 Ah的蓄电池组,用1台小型电机作为负载。TMS320F28335的工作频率为150 MHz,载波频率为30 kHz,滤波器采用双∏型,测得流过负载两端的电流波形如图6所示,可以看出频率和相位跟踪效果较为理想。另外,在光照强度为750 W/m2、温度25℃的环境下,通过实测光伏电池输出功率,基本上维持在最大功率点附近。
在MPPT控制环节,由于光伏电池具有非线性、时变性和数学模型不确定性,这对光伏发电控制系统的能量转换效率和稳定性都是个难题,而运用模糊理论实现光伏发电系统的MPPT控制,很好地弥补了这一不足,使系统具有较强的鲁棒性,在外界环境剧烈变化的情况下仍然可以快速跟踪光伏电池的最大功率点,并能克服最大功率点附近的功率振荡现象。在逆变并网环节,采用软件锁相技术实现频率和相位跟踪,简化了系统的硬件设计,提高了系统的工作可靠性。
[1]熊远生,俞立,徐建明.固定电压法结合扰动观察法在光伏发电最大功率点跟踪控制中应用[J].电力自动化设备,2009,29(6):85-88.
[2]刘邦银,段善旭,刘飞,等.基于改进扰动观察法的光伏阵列最大功率点跟踪[J].电工技术学报,2009,24(6):91-94.
[3]栗秋华,周林,刘强,等.光伏并网发电系统最大功率跟踪新算法及其仿真[J].电力自动化设备,2008,28(7):21-25.
[4]雷元超,陈春根,沈骏,等.光伏电源最大功率点跟踪控制方法研究[J].电工电能新技术,2004,23(3):76-80.
[5]CHIHCHIANG H,CHIHMING S.Study of maximum power tracking techniques and control of DC/DC converters for photovoltaic power system[A].The 29th IEEE Annual Conference on Power Electronics Specialists,1998:86-93.
[6]苏建徽,余世杰,赵为,等.硅太阳电池工程用数字模型[J].太阳能学报,2001,22(4):409-412.