应用全站仪进行三角高程测量的新方法
2010-07-30吕建红
吕建红
(西山煤电集团公司屯兰矿)
在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量和三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度较高,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用,但精度较低,且每次测量都得量取仪器高和棱镜高,比较麻烦而且增加了误差源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了其局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法结合了水准测量的任意置站的特点,减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。
1 三角高程测量的传统方法
三角高程传统测量方法见图1,设A,B为地面上高度不同的两点。已知A点高程HA,只要知道 A点对B点的高差HAB即可由HB=HA+HAB得到B点的高程HB。
图1中:D为A、B两点间的水平距离;
α—在A点观测B点时的垂直角;
i—测站点的仪器高,t—棱镜高;
HA—A点高程,HB—B点高程;
V—全站仪望远镜和棱镜之间的高差(V=Dtanα)
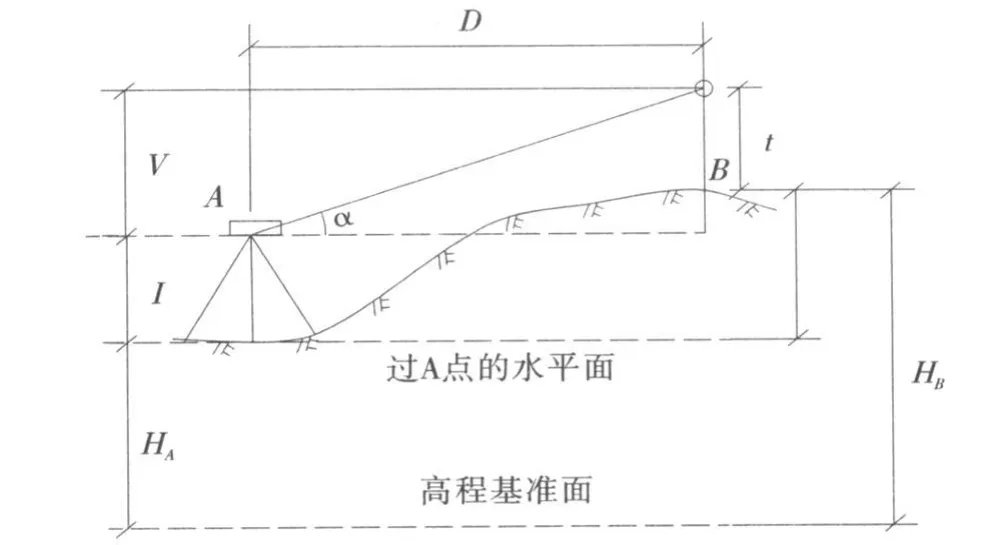
图1 三角高程传统测量方法示意图
首先假设A,B两点相距不太远,可以将水准面看成水平面,也不考虑大气折光的影响。为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则:hAB=V+i-t

式(1)为三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新方法的一般原理进行阐述。从传统的三角高程测量方法中可看出,它具备两个特点:
1)全站仪必须架设在已知高程点上。
2)要测出待测点的高程,必须量取仪器高和棱镜高。
2 三角高程测量的新方法
如果能将全站仪像水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图1所示,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由式(1)可知:

上式(2)除了Dtanα,即V的值可以用仪器直接测出外,i,t都是未知的。但有一点可以确定,即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定 t值也固定不变。从式(2)可知:

由式(3)可知,基于上面的假设,HA+i-t在任意测站上也是固定不变的,可以计算出它的值W。
这一新方法的操作过程如下:
1)仪器任意置站,但所选点位要求能和已知高程点通视。
2)用仪器照准已知高程点,测出V的值,并算出W的值(此时与仪器高程测定有关的常数如测站点高程,仪器高,棱镜高均为任意值。施测前不必设定)。
3)将仪器测站点高程重新设定为W,仪器高和棱镜高设为0即可。
4)照准待测点测出其高程。
下面从理论上分析这种方法是否正确。

式中:
HB′—待测点的高程,m;
W—测站中设定的测站点高程,m;
D′—测站点到待测点的水平距离,m;
α′—测站点到待测点的观测垂直角,(°)。
从式(4)可知,不同待测点的高程随着测站点到其的水平距离或观测垂直角的变化而改变。
将式(3)代入式(4)可知:
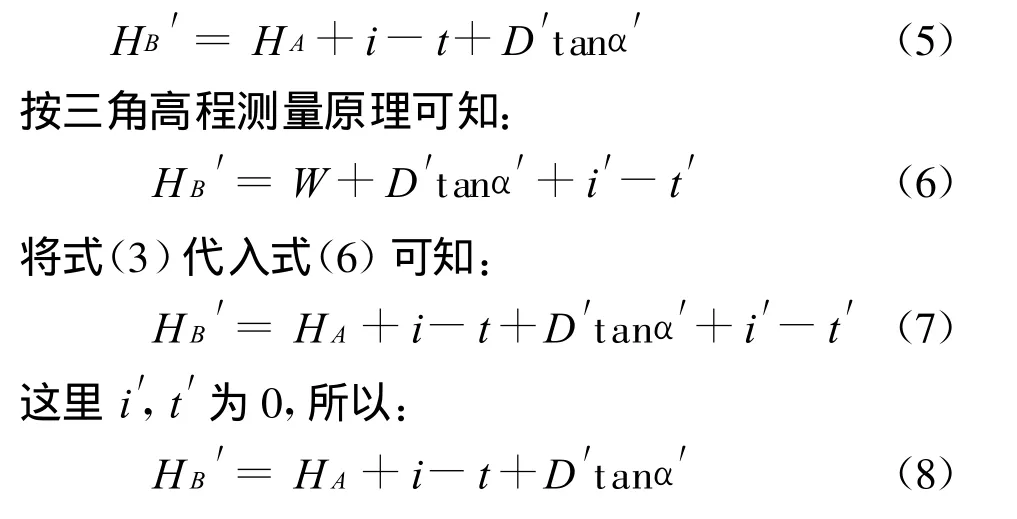
由式(5),(8)可知,两种方法测出的待测点高程在理论上是一致的。也就是说采取这种方法进行三角高程测量是正确的。
综上所述,将全站仪任意置站,同时不量取仪器高、棱镜高,仍然可以测出待测点的高程。测出的结果从理论上分析比传统的三角高程测量精度更高,因为它减少了误差来源。整个过程不必用钢尺量取仪器高、棱镜高,也就减少了由此造成的误差。同时需要指出的是,在实际测量中,棱镜高还可以根据实际情况改变,只要记录下相对于初值 t增大或减小的数值,就可在测量的基础上计算出待测点的实际高程。
