未来20年的太阳系探索(下)
2010-07-25焦维新北京大学地球与空间科学学院
焦维新(北京大学地球与空间科学学院)
(续本刊上期)

3.3 木卫二木星系统任务(EJSM)
□□木卫二木星系统任务是美国和欧洲航天局(ESA)联合探测外行星的计划之一,该计划的探测对象涉及木星和4颗卫星木卫二(Europa)、木卫三(Ganymede)、木卫一(Io)和木卫四(Callisto)。该计划包括2个探测器:一个是“木星木卫二轨道器”(JEO);另一个是“木星木卫三轨道器”(JGO)。前者主要由美国航空航天局(NASA)负责,而后者主要由欧洲航天局负责。
3.3.1 “木星木卫二轨道器”
(1) 科学目标
“木星木卫二轨道器”的探测目的是确定木星系统是否存在适合人类居住的天体。其科学目标有5个方面:
(2) 任务概述
2020年2月,“木星木卫二轨道器”将由宇宙神-5运载火箭发射,在行星际飞行阶段采用金星-地球-地球引力助推轨道(VEEGA),计划于2025年12月进入木星轨道。在进入木星轨道前,探测器利用木卫一的引力助推作用,从而减少进入木星轨道所需要的燃料。
“木星木卫二轨道器”
在30个月的木星系旅行期间,“木星木卫二轨道器”的重要活动包括:4次与木卫一相遇,包括一次飞越火山羽烟;在进入木卫二轨道前,6次与木卫二相遇;6次与木卫三相遇,大范围地探测木卫三的磁层;9次与木卫四相遇,其中至少有1次接近木卫四极区;连续监测磁层,有规律地监测木卫一和木星的大气层;计划于2028年7月进入木卫二轨道,最初运行在高200km、倾角为95°~100°的圆轨道,1个月后转移到高100km的轨道;围绕木卫二运行9个月,最终与木卫二相撞。
由于“木星木卫二轨道器”运行在很低的轨道上,因此它能评估木卫二内部的电磁学特性,观测潮汐和褶皱,以高分辨率绘制其表面地形。其携带的探测雷达能确定冰的三维变化特征和盐水的位置;质谱仪和热成像谱仪可确定化学成分,并能寻找地质活跃的地区。
(3) 科学仪器
“木星木卫二轨道器”携带了11种科学仪器,下表列出了仪器名称及主要性能。
3.3.2 “木星木卫三轨道器”
“木星木卫三轨道器”的首要探测目标是木卫三,木卫三是太阳系最大的卫星,直径超过了水星。其表面覆盖冰层,冰下可能有海洋。
(1)科学目的和科学仪器
“木星木卫三轨道器”的科学目的有5个:
表征木卫三的海洋、深层内部状态、磁场、磁层,绘制其表面成分和地质特征;
在谐振轨道上研究木卫四,观测木卫一的整体形态;
研究木星的大气层;
监测太阳风,研究木星磁层与太阳风相互作用;
研究发生在木星系统内的相互作用。
“木星木卫三轨道器”
为了实现上述科学目标,探测器携带了多种科学仪器,分别是微型激光高度计、无线电科学仪器包、雷达、可见光/近红外光谱仪、紫外成像光谱仪、热红外绘图仪、广角中分辨率摄像机、磁强计、等离子体包和亚毫米波探测器。
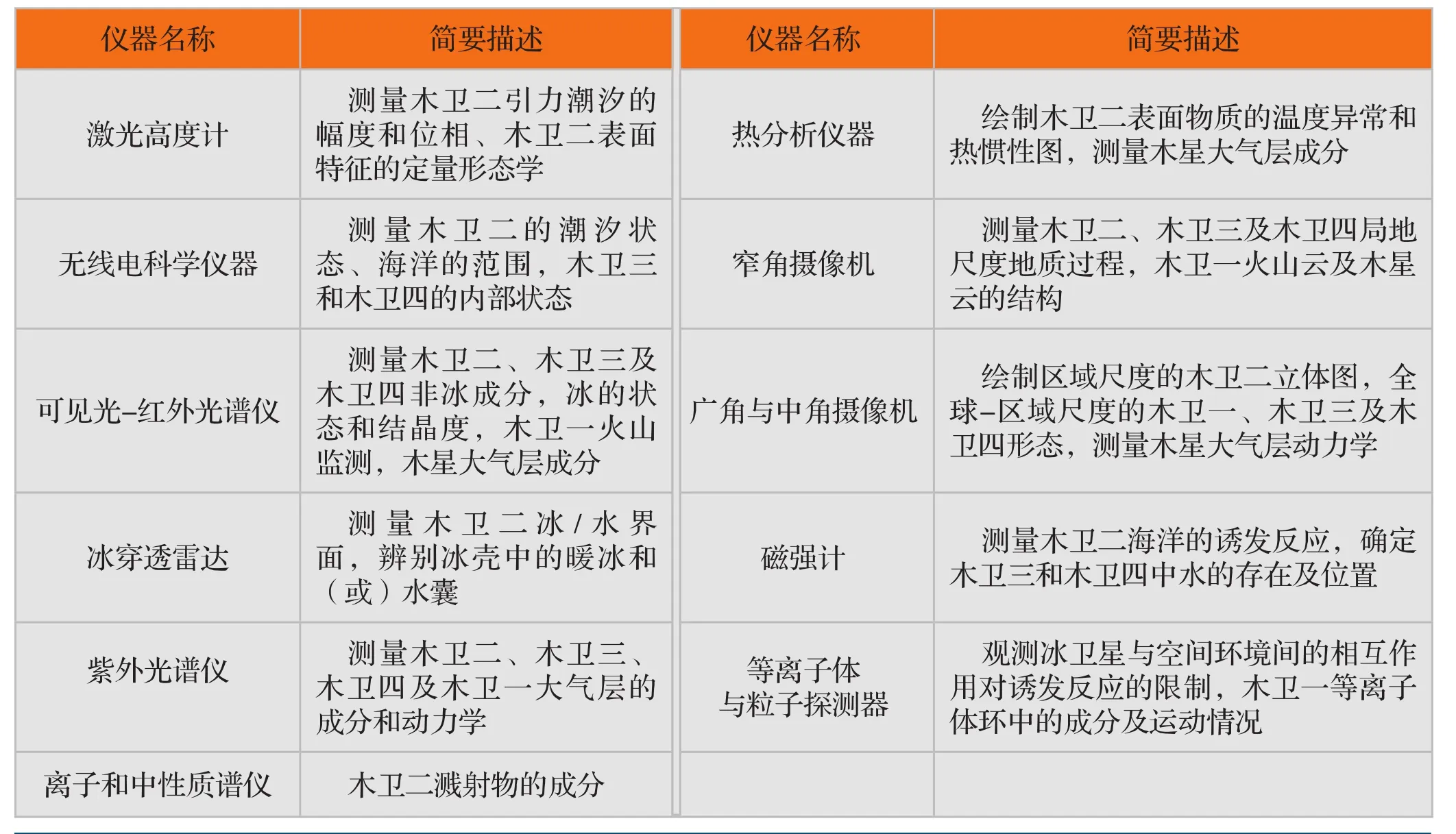
“木星木卫二轨道器”携带的11种科学仪器性能
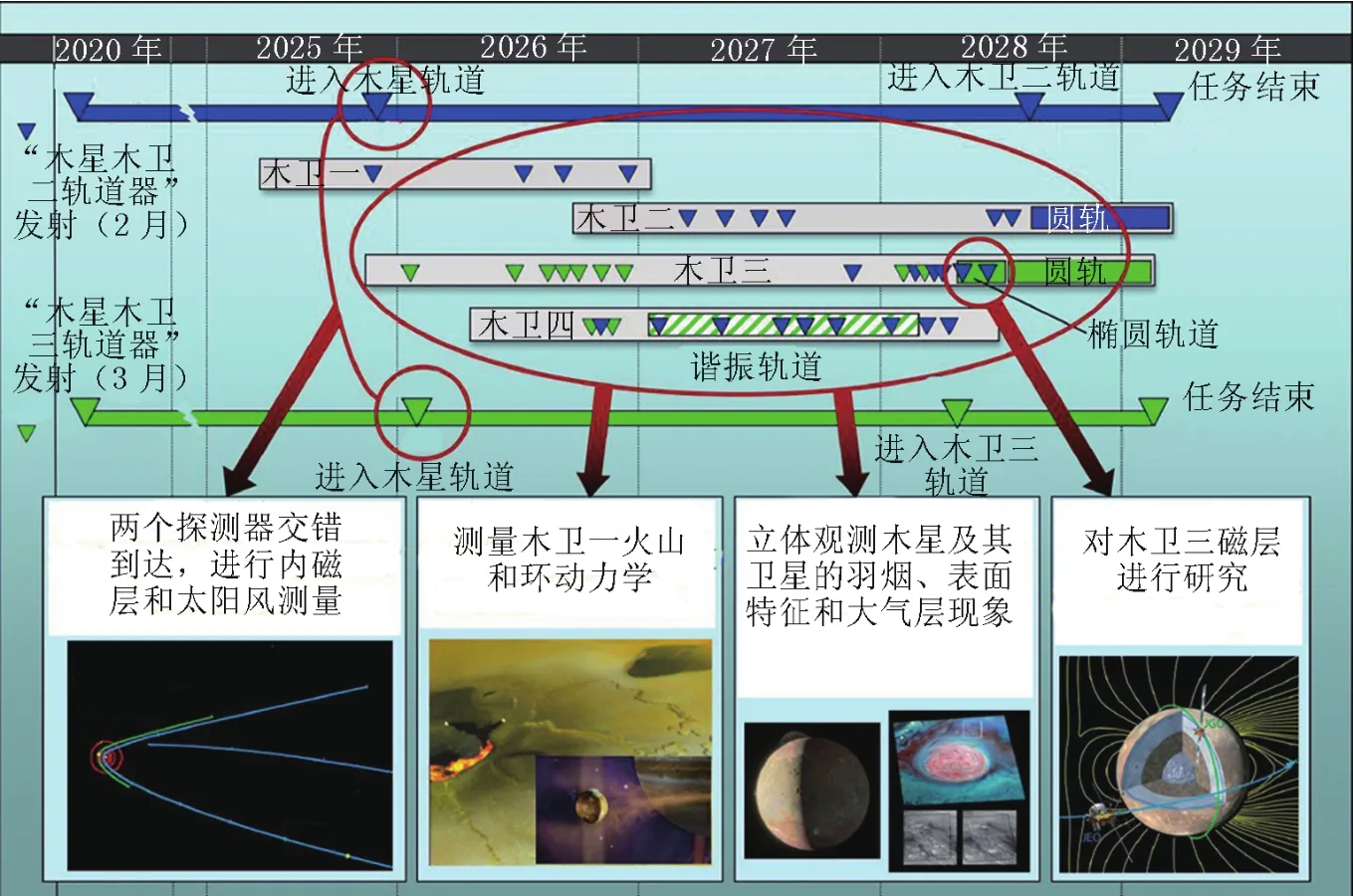
整个木卫二木星系统任务的路线图
(2) 任务过程概述
2020年3月23日,“木星木卫三轨道器”将由阿里安-5火箭发射,在行星际飞行阶段,采用金星-地球-地球引力助推轨道。2026年2月13日进入木星轨道,利用木卫三的引力助推作用,进入初始大椭圆轨道,目的是躲开木星的主辐射带。接着,对木星系统进行近10个月的探测,19次飞越木卫三,最近距离200km。在围绕木卫四的谐振轨道运行1年多以后,探测器转移到近地点200km、远地点6000km的椭圆轨道,并在这个轨道上运行80天,在木卫三的磁层中进行观测。之后,探测器进入200km高的近极地圆轨道,靠近木卫三观测140~180天(观测时间取决于积累的辐射总剂量和轨道稳定性)。整个任务于2029年2月6日结束,届时探测器将飞行3254天,最后撞击到木卫三表面。
3.3.3 技术挑战
在木卫二木星系统任务中,探测器将面对非常强的高能电子辐射环境;由于距离太远,太阳常数低,因此对太阳电池要求高;大多数时间里探测器工作在低温环境,而在飞越金星附近时遭遇非常高的温度环境;在行星际飞行阶段,探测器要利用金星-地球-地球引力助推轨道,而且“木星木卫三轨道器”还要多次利用小天体的引力助推作用,期间的导航操作异常复杂。
3.4 “土卫六土星系统任务”(TSSM)
“土卫六土星系统任务”探测器由轨道器、气球和着陆器三部分组成。轨道器采用三轴稳定方式,干质量为1613kg,其中科学有效载荷有7种仪器,质量为165kg。探测器在内太阳系飞行时使用3台离子发动机。气球由多任务放射性热电发生器提供浮力,直径为10.5m,在土卫六(Titan)大气层内距离其表面10km高度飞行,正常任务期为6个月,发射质量为600kg,携带了8种科学仪器,通过轨道器携带的0.5m高增益天线进行数据中继。着陆器的目标是土卫六北部的海洋,它由电池供电,设计任务期为9h,质量为190kg,携带了5种科学仪器,经轨道器的X频段遥测中继。
3.4.1 科学目标
“土卫六土星系统任务”的目的有三方面:
探索与地球系统类似的土卫六。研究土卫六作为一个系统时是怎样运行的;与地球的异同;其地质学、水文学、气象学和星体大气物理学之间的关系。
检验土卫六的有机物——生命前分子的路径。土卫六大气层、湖、表面和推断的表面下海洋中有机化学的组成是什么;这种有机物与已知的、在流星体中发现的无生命有机物质有什么不同;对研究太阳系中神秘的起源有什么意义。
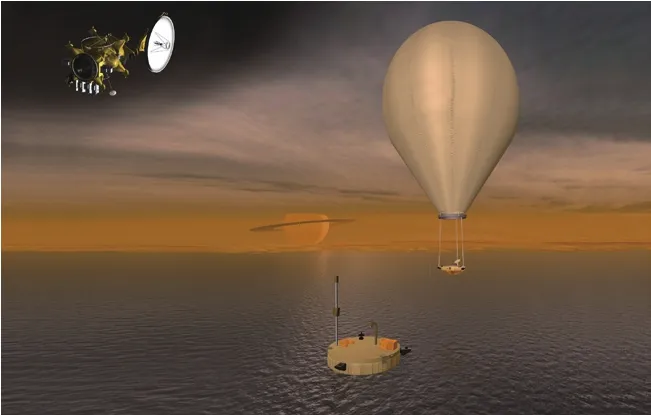
“土卫六土星系统任务”由轨道器、着陆器和气球组成
探索土卫二(Enceladus)和土星的磁层。土星的磁层、太阳风和土卫六之间的能量和物质交换是怎样的;土卫二喷泉的源是什么;喷泉的源中是否存在复杂的化学反应。
为了实现上述目的,该计划确定了相应的科学目标。
(1)探索土卫六的科学目标
测量从特殊的源输入到土卫六大气层的辐射通量,这些源包括磁层、热电子和离子、太阳紫外和极紫外辐射。
从两方面研究了解氧原子的源。一是外源,如磁层;二是来自表面的源,如火山活动或其他过程。
大气层成分的分布及控制这种分布的过程。
大气层化学和动力学状态。
确定土卫六表面液体含量。
表面形态及其演化的历史。
探索表面下海洋的特性。
土卫六的内部结构。
(2)探索土卫六有机物的科学目标
了解土卫六表面和大气层中复杂有机物的结构;
表面有机物与大气层有机物的差别;
表面下海洋存在的证据;
甲烷的源。
(3)探索土卫二和土星磁层的科学目标
研究土星磁层对土卫六大气层的效应;
土星卫星的热演变;
土卫二羽烟的化学成分;
土卫二热异常的源;
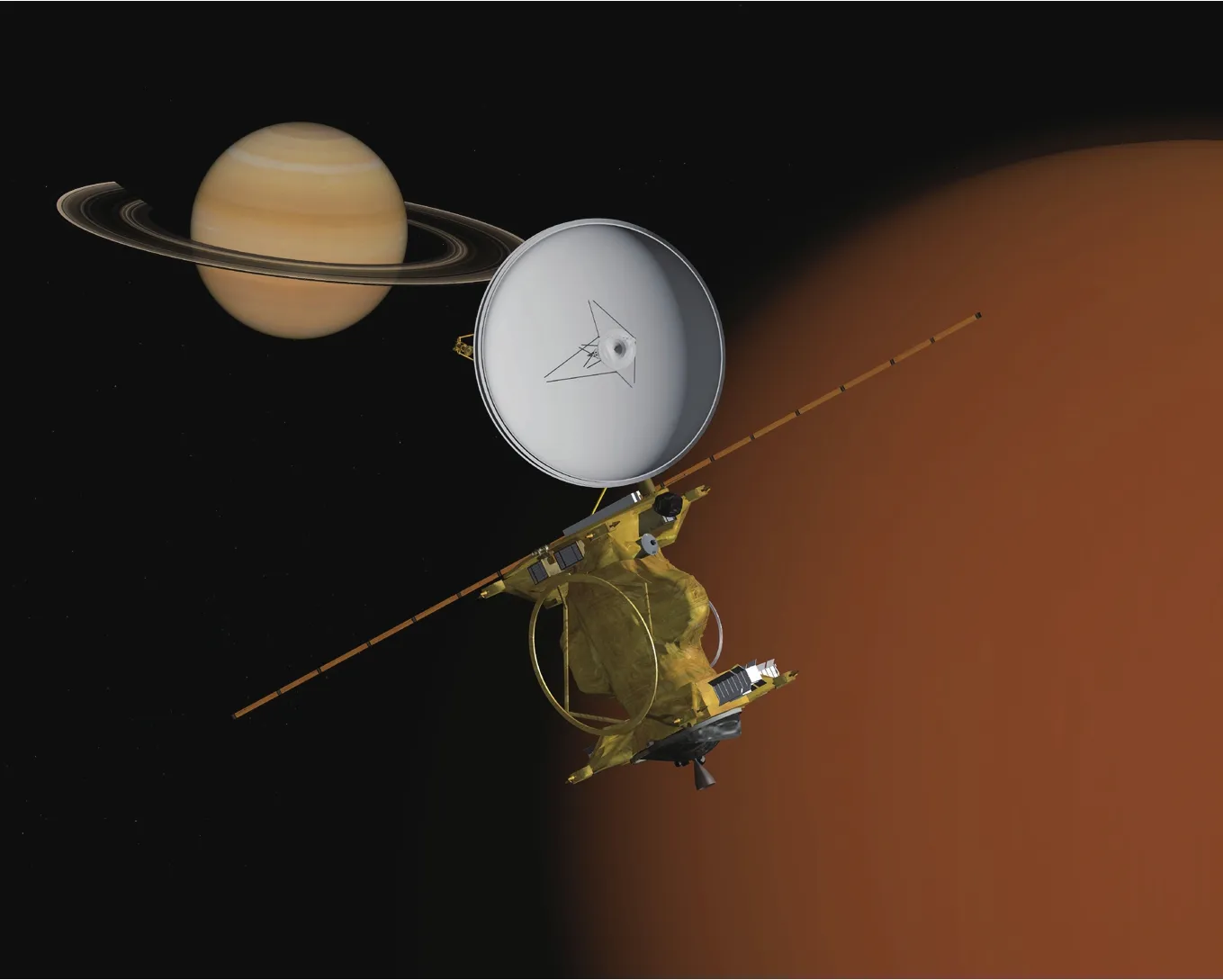
“土卫六土星系统任务”中的轨道器
确定是否有活动羽烟喷出的裂缝,探测器可以接近裂缝获取新鲜水冰样本。
3.4.2 科学仪器
“土卫六土星系统任务”探测器的轨道器、气球和着陆器都各自携带了科学仪器。轨道器上的科学仪器有高分辨率成像仪和光谱仪(HiRIS),土卫六穿透雷达和高度计(TiPRA),磁强计、能量粒子谱仪、朗谬尔探针和等离子体谱仪(MAPP),亚毫米光谱仪(SMS),热红外光谱仪(TIRS),无线电科学与加速度计(RSA),高分子质谱仪(PMS)。气球上的科学仪器有气球成像光谱仪(BIS)、土卫六气球的可见光成像系统(VISTA)、大气层结构仪器/气象包(ASI/MET)、土卫六电环境包-B(TEEP-B)、土卫六雷达探测器(TRS)、土卫六气球化学分析器(TMCA)、磁强计(MAG)、探测器/气球遥测系统无线电科学(MRST)。着陆器上的仪器有土卫六着陆器化学分析器(TLCA)、土卫六探测器和灯(TiPI)、大气层结构仪/气象包-土卫六电环境包(ASI/MET-TEEP)、表面性质包和带有磁强计的声传感器包(SPP)、探测器和着陆器遥测系统的无线电科学(LRST)。
3.4.3 任务设计概述
(1) 发射与行星际飞行
2020年9月,“土卫六土星系统任务”探测器将由宇宙神-5火箭发射,开始执行9年的行星际飞行,在此期间利用太阳电推进技术,并结合金星和地球的引力助推作用。具体过程包括:2020年12月1日开始使用太阳电推进;2021年10月7日,在距离地球16900km时飞越地球;2022年2月4日飞越金星,距离金星5300km;2023年6月11日第2次飞越地球,距离地球4500km;2025年6月11日第3次飞越地球,距离地球600km;2025年10月28日结束太阳电推进。探测器计划于2029年10月到达土星。
(2) 绕土星航行阶段
这个阶段开始于2029年10月28日进入土星轨道时。在其后2年的绕土星航行期间,16次飞越土卫六,7次飞越土卫二。气球在第1次飞越土卫六时被发射;着陆器在第2次飞越土卫六时被发射。
探测器在进入土星轨道后,执行1次气球定向机动(BTM),使气球指向20°(N);2030年2月7日探测器释放气球,气球在早晨被释放,到夜幕降临时约有6个地球日执行科学任务。接着,轨道器进行近地点升高机动,降低逃逸速度,以便执行第2次土卫二飞越,并释放着陆器(有21天的窗口)。着陆器的着陆点在克拉肯(Kraken)海,由于着陆时没有阳光照射,因此设计了一只照明灯。
(3) 进入土卫六轨道
2031年9月29日探测器将进入土卫六轨道。在围绕土卫六飞行22个月期间,首先是2个月的气动制动,使远地点高度由15000km降低到1500km,探测器将运行在高1500km、倾角为85°的近极地圆轨道。
在探测任务结束时,轨道器将进行一次小的离轨机动,使其高度衰减,最终的撞击点偏离表面可能有水的区域几百千米,这是从行星防护的角度考虑的。
3.4.4 科学亮点
“土卫六土星系统任务”探测器的科学亮点在于:第一次实地探测地球以外的海洋;第一次实地探测地外天体的有机化学;第一次长时间直接探测土卫六复杂的低层大气层风;第一次不受土卫六电离层阻碍寻找永久磁场;第一次实地探测土卫六冬天的极区环境;第一次高精度绘制土卫六表面图,能辨别沉积的物质、构造和低温火山过程;第一次直接探测土卫二的羽烟;第一次探测土卫六的未知层(400~900km);第一次获得用于研究土卫六内部结构和外壳结构的高阶重力分布图;第一次验证土卫六磁场是内在磁场还是感应磁场。
3.5 其他天体探测计划
3.5.1 美国的探测计划
金星探测计划包括“金星实地探索者”(VISE,2015年)、“金星移动探索者”(VME,2020年)、金星取样返回任务。
海王星探测计划有“海王星-海卫一探索者”(NTE)。
彗星探测计划有彗核取样返回(2015年)。
小行星探测计划有黎明号小行星探测器(已于2007年9月27日发射,2011年9月到达灶神星,2015年2月到达谷神星)、小行星取样返回(2015年)。
木星探测计划有“朱诺”(Juno)探测器,它将于2011年8月发射,主要目的是研究木星是怎样形成的,是否有固体内核,大气层深处的特征。
冥王星与开泊带探测计划有“新地平线”探测器,它已于2006年1月19日发射,计划2015年7月到达冥王星,探测冥王星的表面成分、地质特征和大气层特性,并在2016-2020年探索开泊带天体。
3.5.2 其他国家和地区的探测计划
欧洲航天局与日本合作研制的水星探测器——“贝皮-哥伦布”(Bepi-Colombo)将由水星行星轨道器和水星磁层轨道器组成,计划于2013年发射,2019年8月到达水星,使用太阳电推进技术。
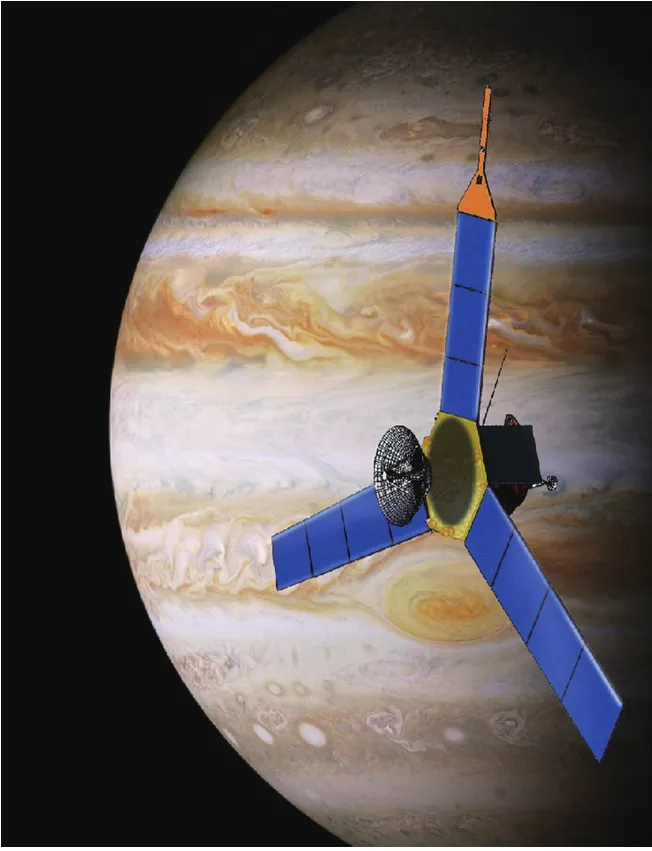
“朱诺”木星探测器
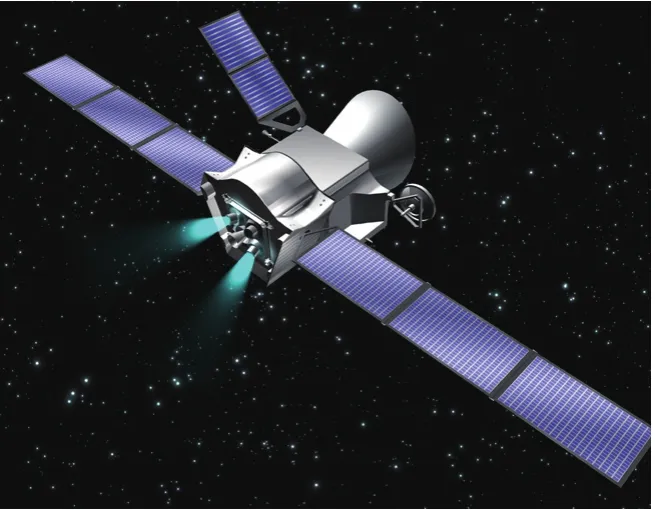
“贝皮-哥伦布”探测器
欧洲航天局的近地天体取样返回任务“马可-波罗”(Marco-Polo)探测器将于2017年发射。日本将在2010年发射行星-C(PLANET-C)金星探测器。俄罗斯将在2016年发射金星-D(Venera-D)探测器。
4 未来探索的特点和技术挑战
4.1 未来探索的特点
载人探测是许多国家追求的目标。除了美国已经制定了完整的载人登月计划之外,俄罗斯、欧洲、日本、印度等国家和地区也初步制定了载人登月计划,美国和欧洲航天局还提出了载人探测火星的计划。
探测范围更加广泛。未来的探索范围从内太阳系到外太阳系,从行星、小行星、彗星、巨行星及卫星到开泊带天体,涉及更远、环境更极端的天体。
探测方式多样化。在一次任务中将采用多种探测方式,如飞越、环绕、着陆等。
广泛采用先进技术。包括新型推进技术、电源技术、探测技术等。
科学目标更加明确。未来的探测是以往普查基础上的详查,对仪器的水平要求更高,科学目标更明确、更严谨。
多项计划是国际合作的产物。
4.2 主要的技术挑战
(1)推进技术包括大推力运载火箭、多功能上面级火箭、太阳电推进和高级化学推进。
(2)通信与导航技术深空通信网(DSN)直接对地通信,包括大孔径天线与小孔径天线阵;就近中继连接,如月面导航站、火星表面导航站、火星中继卫星。新型空间通信导航技术包括量子秘钥空间分发技术、激光通信技术、太赫兹(0.3~20THz)空间通信技术、纳米通信器件技术、星载智能天线技术、量子定位系统、脉冲星导航技术等。
(3)电源技术放射性同位素电源系统、适于低温环境的太阳能电源以及能源存储技术。
(4)轨道设计广泛利用引力助推轨道,多次飞越行星轨道的最佳设计。
(5)自主运行自主操作、软件检验和生效、在轨数据处理方法与设备。
(6)着陆技术涉及轨道进入、气动制动、气动捕获、降落伞、反冲火箭、气囊、太空吊车和漫游车等技术。
(7)极端环境涉及高温高压、极高热通量、强辐射、极度严寒环境。
(8)科学仪器包括新型遥感仪器和实地分析仪器。目前正在发展的新型遥感仪器包括大口径、可展开新型光学望远镜,互补金属氧化物半导体/主动像元传感器(CMOS/APS),超导隧道结(STJ)光学辐射探测器,分布式读出成像探测器(DROIDS),比例尺立体测绘仪,稀疏孔径成像仪,显微相机(Microcam)等。新型实地分析仪器包括X射线衍射光谱仪,激光质谱仪(LMS),生命标志芯片(LMC),有机分子分析器(MOMA),介电常数探测器,微成像尘埃分析系统(MIDAS),互阻抗探针(MIP),行星大气层结构探测器等。
5 结束语
我国应认真研究和借鉴国外的经验,根据我国的经济和技术制定切实可行的探测计划。在跟踪国外先进技术发展的同时,尽快掌握在太阳系探索中起重要作用的探测技术。对制约我国空间探测发展的关键技术要制定攻关计划和验证计划。 (全文完)

