缓冲气囊展开与缓冲着陆过程的仿真分析
2010-07-18卫剑征谭惠丰万志敏戈嗣诚
卫剑征 谭惠丰 万志敏 戈嗣诚
(1哈尔滨工业大学复合材料与结构研究所,哈尔滨 150080)
(2哈尔滨工业大学分析测试中心,哈尔滨 150001)
(3北京空间机电研究所,北京 100076)
1 引言
充气展开与缓冲过程是缓冲着陆器通过气囊充气展开后,缓冲着陆的重要阶段,对缓冲着陆器的缓冲着陆起到关键性的作用。缓冲气囊在地面折叠成较小体积,安装在返回舱底部防热罩内。在返回舱下降过程中,底部防热罩分离,缓冲气囊充气展开,紧贴在返回舱底部。在着陆时,气囊内的气体受到压缩,吸收着陆冲击能量,达到缓冲的目的[1]。缓冲气囊受压行程大,因而缓冲的加速度峰值小,缓冲效果明显、可靠性高。但是,其主要缺点在于展开后,与返回舱组合体的质心位置高,稳定性差,对地面风和地面坡度的影响敏感;因此,研究缓冲气囊的技术关键依然是气囊的碰撞反弹以及倾倒等方面。
着陆缓冲气囊视其在缓冲行程过程是否具有排气能力,可分为不具有排气孔的气囊和具有排气能力的气囊2大类。而具有排气能力的气囊又分为排气孔面积为固定的气囊、具有可控制排气孔面积的气囊以及增压型气囊等3种[2]。这些设计都对缓冲起到积极的作用。
最近美国JPL在研制“火星探路者”着陆器的着陆缓冲系统时,使用了一种新型的、不具有排气孔的、全向缓冲式气囊装置。另外,美国NASA兰利研究中心把气囊缓冲也作为“猎户座”探索飞行器缓冲着陆器的候选之一。D.Cadogan对“火星探路者”全向式缓冲气囊的设计以及其应力分析进行了研究[3]。邓春燕等以“火星探路者”着陆系统的全向式气囊缓冲装置为对象,采用有限元仿真分析技术,实现气囊结构和着陆过程的数学和力学建模,获得全向式缓冲气囊着陆的动态过程仿真;同时得到重点部位过载、位移和速度、气囊内部的压力和温度等参数[4]。Ben Tutt对列联式缓冲气囊进行了设计与分析[5]。Dave Northey对采用排气孔缓冲气囊进行了研究[6]。ILC Dover公司的Lauren S.Shook设计了6个缓冲气囊的第二代着陆系统,其特点是每个缓冲气囊内部还包括1个小气囊[7]。波音公司的Lee依据NASA“猎户座”缓冲着陆器研制了缩比模型,并且建立了1个用以评估气囊着陆衰减系统的LS-DYNA有限元模型,测试与仿真进行了对比验证,结果吻合很好[8]。
由于缓冲着陆器通过气囊充气展开缓冲着陆的模拟试验受实际工况的影响很大,试验难于实现,且成本较高,本文将基于LS-DYNA显式有限元程序,采用控制体积方法对着陆器的展开和缓冲过程进行仿真分析,对缓冲着陆器模型进行垂直碰撞和侧碰撞过程仿真,得到气囊缓冲条件下着陆器模型着陆时的缓冲行为特征,探索控制过载,以保证系统稳定性。
2 充气控制体积法
本文基于LS-DYNA代码程序,对缓冲着陆器的单个气囊与缓冲着陆器接触碰撞地面的过程进行了动力学分析,掌握缓冲着陆器的展开过程以及缓冲特性。此程序是功能齐全的几何非线性、材料非线性和接触非线性程序,是以Lagrange算法为主的显式求解分析,以及以结构分析和非线性动力分析为主的有限元程序。
把密闭的气囊作为1个封闭的控制体积域,如图1所示。
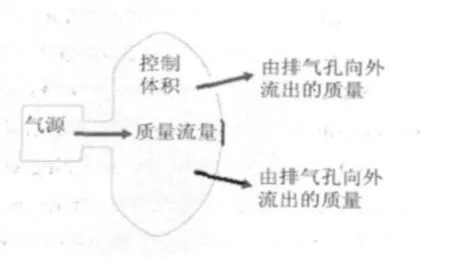
图1 充气模型
充气控制体积模型假定:在每个时刻腔内是等压的;气体的流动为准静态过程,即忽略气体惯性;充气过程为绝热过程。其数学描述为:在时间t-Δ t内腔内的内能是已知的,t时刻的内能E(t)可近似表示为[9]

式中 cp是比定压热容;◦m(t)是充入气体质量流量变化率;Δ t是时间步长;Tin是充入气体的温度。腔内气体质量密度ρ(t)由质量流量的变化率可近似为:

式中 m(t-Δ t)为t-Δ t时刻腔内气体的质量;V(t-Δ t)是在t-Δ t时刻腔的体积。根据理想气体状态方程,压强 p(t)可由式(3)计算出:

式中 k是比定压热容与比定容热容的比值,即比热比;m(t)为t时刻腔内气体的质量。在t时刻充气结构的运动方程为:

式中 M,C,K是根据当前构型计算的整体质量、阻尼和刚度矩阵;Rext是包括压强在内的外部载荷矢量;,,D是在某时刻的加速度、速度和位移。
式(4)的有限差分形式可表示为:

3 缓冲气囊的充气展开过程分析
3.1 缓冲气囊“Z”形折叠的有限元模型
缓冲气囊折叠后的几何参数为最大长度为470mm,均匀地折叠6片,每折叠片处的最大宽度为90mm,材料厚度为0.5mm。缓冲气囊的材料参数为:密度为0.913g/cm3,弹性模量为1.72GPa,泊松比为0.25。缓冲气囊的有限元模型采用三节点的三角形单元进行网格划分,总节点数为8 738个,单元总数为17 412个。
缓冲气囊的有限元模型数值模拟的基本假定:1)模拟的空间环境温度为27℃,环境压力为10kPa。2)不计缓冲气囊折叠处的损伤;不考虑缓冲气囊折叠初始应力;缓冲气囊在初始折叠状态不记局部褶皱。缓冲气囊在初始折叠状态两相邻内壁之间的距离为1mm,外壁之间的距离也为1mm。3)缓冲气囊材料简化为各向同性的线弹性无弯矩薄膜材料,单元类型为薄膜单元。
3.2 “Z”形折叠的缓冲气囊展开过程仿真分析
缓冲气囊的折叠展开过程在缓冲着陆器中有着重要的应用价值,“Z”形折叠是缓冲气囊的基本折叠方式之一,其充气展开过程是空间环境下缓冲着陆前的重要阶段。本文以“Z”形折叠的气囊的充气展开过程进行分析:边界条件是“Z”形折叠球最长的两端顶点在Y、Z方向固定,在X方向自由,即这两点只能沿X方向运动;充气速率是恒定的。为了节省计算时间,反映展开的主要动力学特征,本文先试选取的充气速率为5g/s,展开过程如图2所示。从缓冲气囊的充气展开构形变化过程可以明显看出:这种折叠方式能够顺利展开,并实现球形形状。

图2 缓冲气囊的展开过程图
3.3 缓冲气囊在展开过程的参数变化特性
缓冲气囊在展开过程中的参数变化主要有体积、压力以及动能的变化。“Z”形折叠气囊在充气展开过程中体积随时间的变化关系如图3所示。从图中可以看出:缓冲气囊的体积先是明显增加,在0.015s后体积增加趋势明显减缓。这是由于折叠缓冲气囊开始随着充气的进行体积将不断增加,当气囊完全展开以后,由于材料本身的弹性,从而引起体积的轻微增加。以上结果表明,缓冲气囊的体积变化与实际充气过程基本符合。
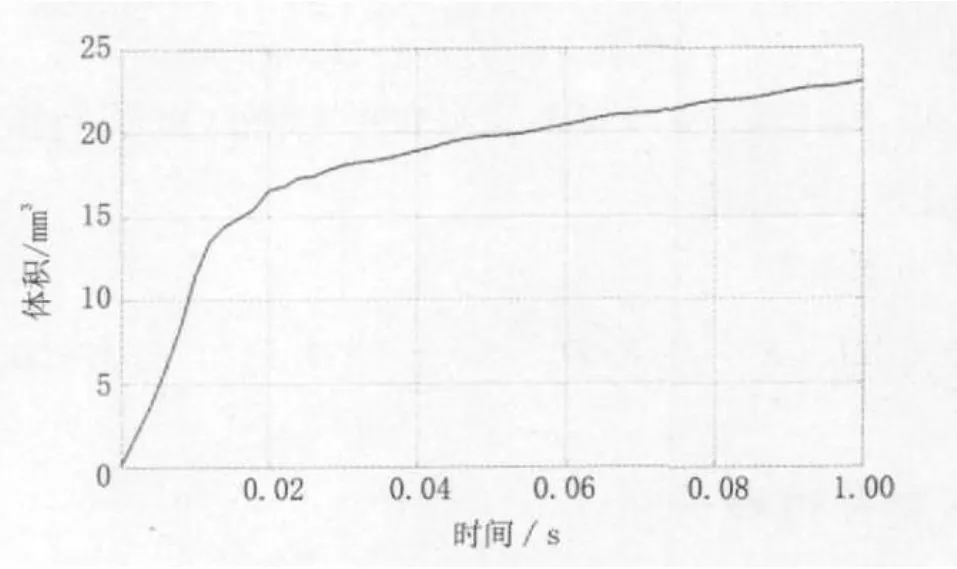
图3 充气展开过程中体积随时间的变化关系
缓冲气囊内的压力变化,见图4。从图中可以看出:缓冲气囊内的压力首先出现了波动,在0.015s后压力明显增加。这是由于折叠边界是自由的,气囊内的气体使增加的压力迅速转化为缓冲气囊的展开动能,缓冲气囊的体积增加,当缓冲气囊完全展开以后,随着充气的继续进行,从而引起压力的不断增加。图5为缓冲气囊在充气展开过程,动能随时间的变化关系:缓冲气囊的动能在初始充气瞬间明显增加,之后动能减小,气体的能量转变为缓冲气囊体积内能的增加;在0.05s后缓冲气囊已完全展开,而缓冲气囊在X方向是自由的,于是在惯性作用下动能又开始增加。

图4 充气展开过程中压力的变化

图5 展开过程中动能的变化
4 缓冲气囊着陆器着陆过程的仿真分析
受摩擦力和气囊结构阻尼的影响,气囊着陆缓冲系统在着陆弹跳过程中的速度会逐步降低,着陆动能会在与地面碰撞的过程中衰减掉。在所有弹跳过程中,着陆器在第一次弹跳时承受的过载水平最大,囊内压力最高,囊体织物承受的面内应力最大[10]。通过分析气囊系统在第一次弹跳过程中的动态响应就可以直接评价整个气囊系统的着陆缓冲性能,并且能够检验囊体织物材料是否能够满足强度要求。因此,需要特别注意气囊着陆缓冲系统与地面的首次碰撞。为了研究气囊着陆缓冲系统在整个着陆过程中的总弹跳次数、弹跳总时间、系统动能能量衰减过程等情况,有必要进行长时间历程分析。但是长时间历程分析需要花费大量的计算机时,因此,本文初步考虑典型分析工况下的气囊着陆缓冲系统的第一次弹跳过程。
4.1 缓冲气囊着陆器的有限元模型
缓冲气囊着陆器的有限元模型如图6所示,主要包括6个气囊(CV1、CV2、CV3、CV4、CV5和CV6),每个气囊都采用独立的充气控制体积法进行充气。每个气囊长为500mm,直径为300mm,壁厚为1.5mm;缓冲气囊着陆器的最大直径为1 676.7 mm,高度为950mm。Z轴垂直于水平地面,X轴和Y轴的水平运动平行于碰撞的地面。气囊的材料模型假设为正交各向同向的线弹性材料,单元类型采用四节点的薄膜单元,结构的材料参数见表1。仿真环境压力为0.1MPa,充入气体的温度为27℃,充气速率为5kg/s,充气时间为0.005s。地面与缓冲气囊之间的摩擦因数为0.6。

图6 缓冲气囊着陆器的有限元模型
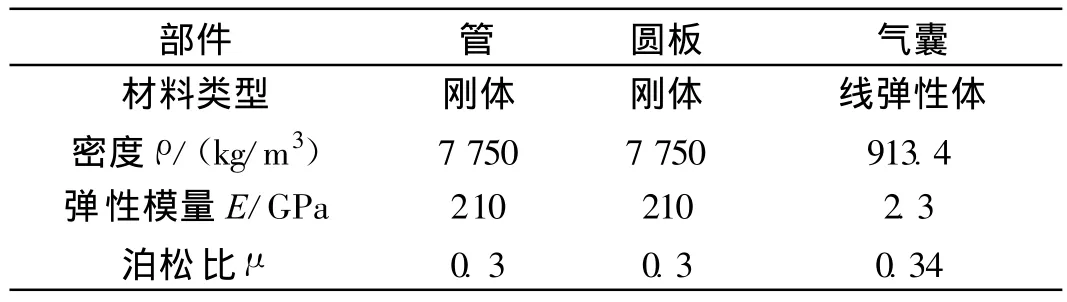
表1 结构的材料参数
4.2 垂直速度碰撞分析
不同时刻气囊缓冲着陆器正向碰撞时的气囊变形如图7所示,其中着陆器初始垂直速度为-22.86m/s,水平速度为0。碰撞结果表明:这6个气囊同时与地面接触,对着陆器起到有效的缓冲。这个仿真结果与文献[8]中的仿真结果基本一致。

图7 不同时刻着陆器的缓冲气囊变形图
每1个气囊内的压力在碰撞时随时间的变化曲线如图8所示。从图中可以看出:6个气囊内的压力首先增加到0.25MPa,这是由于从0s到0.005s的时间内气囊在充气膨胀;之后,6个气囊内的压力进一步增加到0.45MPa,这是由于与地面碰撞挤压引起的;最后,当这些气囊因没有排气而又反弹后,压力又降为0.25MPa。这些结果与文献[8]中的103 001测试分析结果一致。
着陆器在气囊缓冲阶段加速度随时间变化的关系,如图9所示。从图中可以看出:加速度首先在0.015s内从零逐渐增加到最大值;之后,加速度也用了0.015s的时间减为0。其中加速度的最大值为11gn,此时也正是6个缓冲气囊变形最大的时刻,该加速度值比参考文献[8]中的8gn加速度略为偏大。其原因可能是由于系统的质量和充气速率存在误差。该结果也与文献[8]中的103 001测试分析结果一致。
图10为着陆器在整个初始碰撞阶段的动能随时间的变化。从图中可以看出:在气囊缓冲阶段动能逐渐减为0,能有效地对着陆器起到缓冲的作用。在碰撞过程中系统的动能转化为气囊的弹性势能,由于气囊采用全积分的薄膜单元,不能抵抗面外刚度,所以气囊产生很大的变形;之后,系统的动能开始从0增加,此时弹性势能又转换为系统的动能,这就将可能对着陆器的稳定着陆产生不利的影响,因为仅通过摩擦做功消耗系统的能量,而不采用排气的方式避免反弹,就可能需要碰撞多次后,着陆器才能静止。
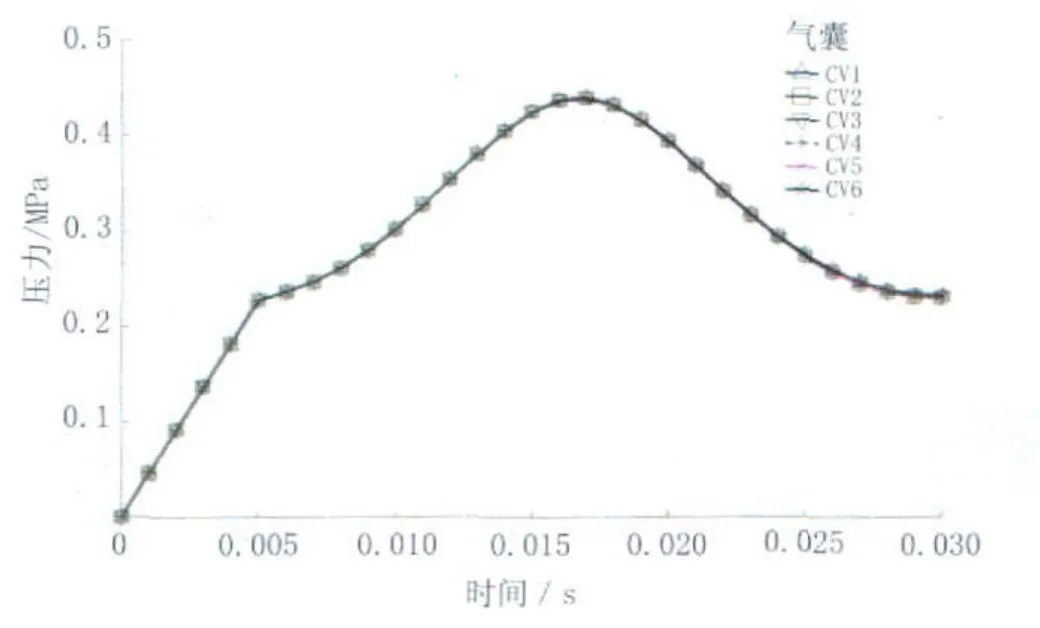
图8 初始碰撞时气囊内的压力变化

图9 初始碰撞时着陆器的垂直加速度变化
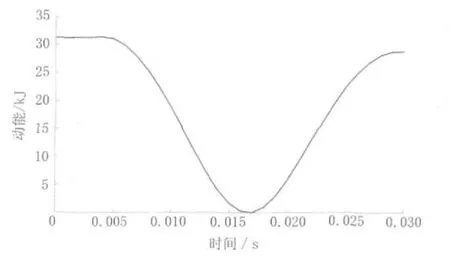
图10 初始碰撞时着陆器的动能变化
4.3 着陆器缓冲气囊的侧碰分析
图11为着陆器在侧碰过程中不同时刻气囊的变形图,其初始条件为垂直速度-15m/s和水平速度32m/s。从图中可以看出6个缓冲气囊同时与地面接触碰撞,而且气囊CV1,CV2和CV6对着陆器起到有效的缓冲,它们变形非常明显;而CV3,CV4和CV5在侧碰过程中起到缓冲的作用不明显,这是由于后面的3个气囊固定不充分出现了侧滑,不能受到着陆器圆板的挤压作用。
侧碰过程中,6个缓冲气囊内的压力随时间的变化图,见图12。从图中可以看出:6个气囊内的压力首先在0s到0.005s的充气时间内增加到0.25MPa,之后由于气囊的碰撞缓冲CV1,CV2和CV6内的压力开始增加到0.35MPa后又减为0.25MPa,但是气囊CV3,CV4和CV5的压力几乎没有变化,一致维持在充气压力后的0.25MPa,这表明这3个气囊没有受到挤压变形,也就是说CV3,CV4和CV5产生了侧滑没有对着陆器的缓冲起到作用,所以在设计着陆器缓冲气囊时应该避免气囊的侧滑。

图11 着陆器在侧碰过程中不同时刻气囊的变形图
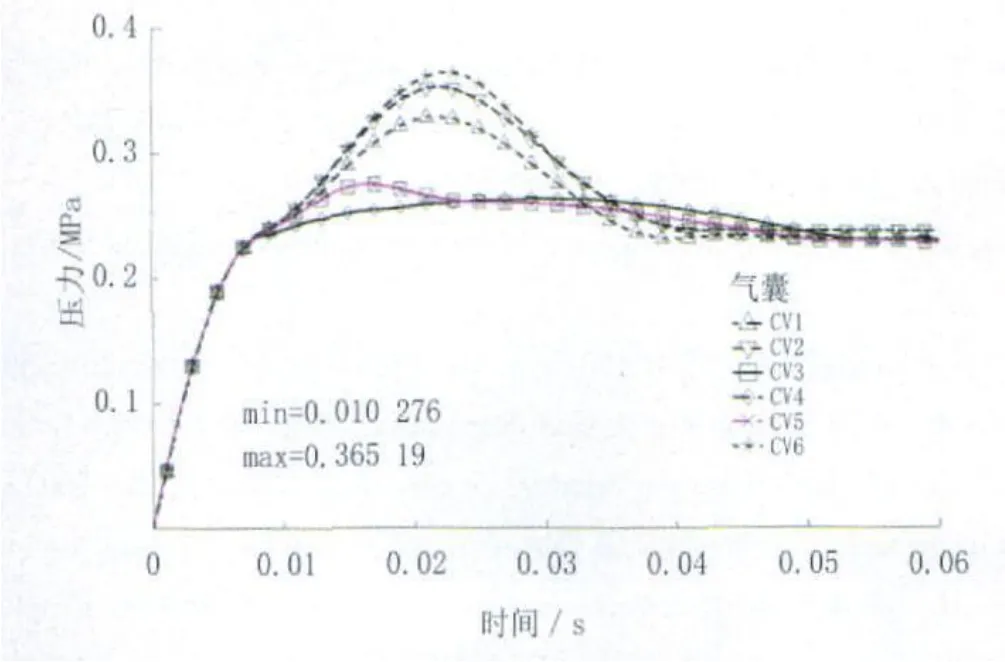
图12 侧碰过程中6个缓冲气囊内的压力变化
气囊侧碰过程中着陆器的垂直加速度随时间的变化,如图13所示,从图中可以看出:垂直加速度首先逐渐从0增加到5.5gn,之后由于气囊的反弹又降为0,这期间时间为0.035s。缓冲着陆器的加速度峰值主要与垂直着陆速度相关,要将着陆器的过载控制在某一许可范围内,缓冲装置必须吸收由垂直速度产生的运动能量。
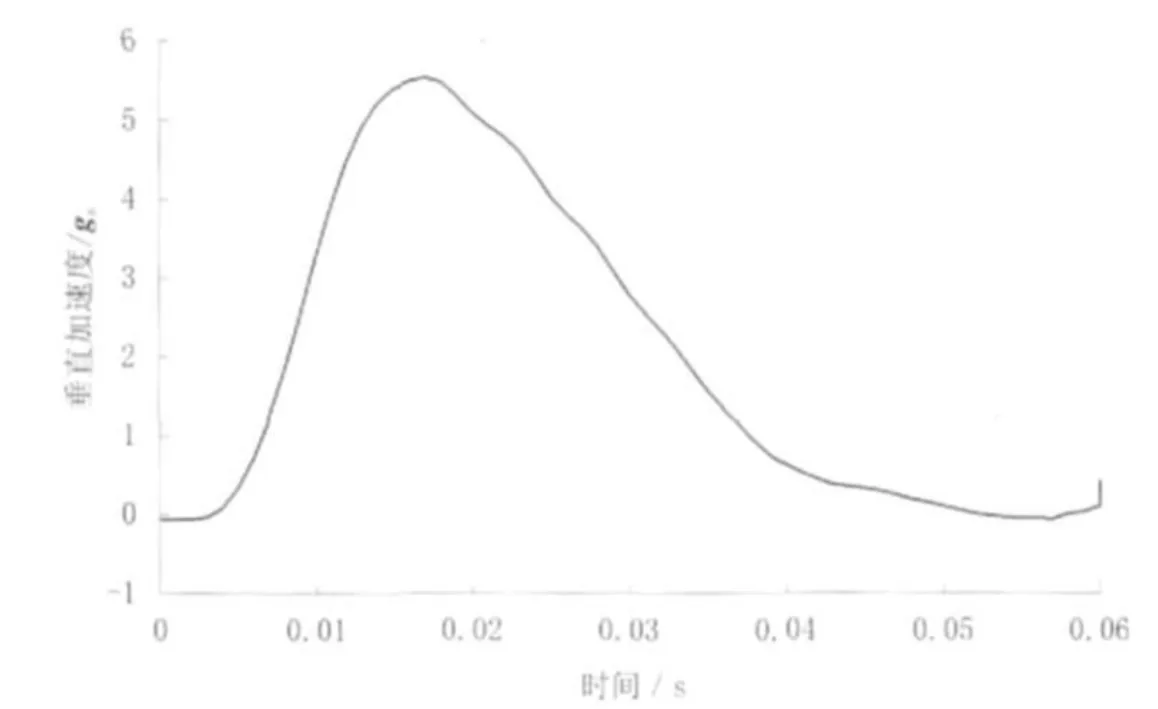
图13 侧碰过程中垂直加速度的变化
5 结论
本文采用有限体积控制方法,基于显式算法程序,首先对单个“Z”形折叠的气囊进行充气展开过程仿真分析,之后进一步对采用6个缓冲气囊的着陆器的着陆缓冲过程进行了正碰和侧碰分析,通过仿真分析研究得到以下结论:
1)“Z”形折叠的缓冲气囊能顺利展开,缓冲气囊的体积和压力在充气展开过程中的变化规律能为缓冲气囊在空间环境下充气展开过程的预报提供一定参考。
2)建立了LS-DYNA有限元模型,得到了第一次着陆过程中缓冲气囊内的压力、着陆器的加速度和动能的变化。缓冲着陆器的加速度峰值主要与垂直着陆速度相关,要将着陆器的过载控制在某一许可范围内,缓冲装置必须吸收由垂直速度产生的运动能量。
3)对于具有水平速度的侧碰着陆过程,将对着陆的稳定性产生一定的影响。这些影响取决于接触摩擦力、重心位置以及气囊的位置合理布局等。
[1]Cliff E W,Charles S,Joseph W,et al.Impact Attenuating Airbags for Earth and Planetary Landing Systems[C]//AIAA SPACE 2007 Conference&Exposition 18-20 September 2007,Long Beach,California.AIAA-2007-6172.
[2]林华宝.着陆缓冲技术综述[J].航天返回与遥感,1996,17(3):1-16.
[3]Cadogan D,Sandy C,Grahne M.Development and Evaluation of the MarsPathfinder Inflatable Airbag Landing System[J].Acta Astronautica,2002,50(10):633 640.
[4]邓春燕,裴锦华.全向式气囊着陆装置缓冲过程的仿真研究[J].中国空间科学技术,2010,30(1):78-83.
[5]Ben T,Charles S,JamesC.Status of the Development of An Airbag Landing System for the OrionCrew Module[C]//20th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar,Seattle,Washington,AIAA-2009-2923.
[6]Dave N,Chris M.Improved Inflatable Landing Systems for Lowcost Planetary Landers[J].Acta Astronautica,2006(59):726-733.
[7]Lauren S S,Richard B T,Jon H.SecondGeneration Airbag Landing System for the Orion Crew Module[C]//20th AIAA Aerodynamic Decelerator SystemsTechnology Conference and Seminar,Seattle,Washington,AIAA-2009-2989.
[8]Timothy J L,John M,Michael A F.Airbag Landing Impact Test/Analysis for Exploration Vehicle[C]//49th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference.Schaumburg,IL,AIAA-2008-1745.
[9]卫剑征,苗常青,杜星文.充气太阳能帆板展开动力学数值模拟预报[J].宇航学报.2007,28(2):322-326.
[10]万志敏,谢志民.气囊缓冲飞行器模型着陆特性的试验研究[J].试验技术与试验机,2003,43(1):9-12.
