主动式定位系统实时数据传输与解译*
2010-07-18黄昆学章传银陈品馨
黄昆学,章传银,马 莹,陈品馨
(1.中国测绘科学研究院,北京100830;2.山东科技大学,山东青岛 266510;3.中国矿业大学(北京),北京100083)
0 引 言
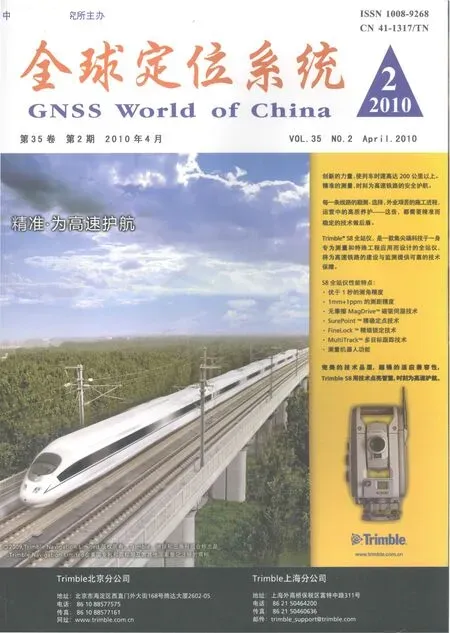
主动式定位系统可实现远距离不接触目标以获取目标点三维坐标的功能,能很好的解决对不便到达目标的定位问题。主动式定位系统主要由GPS-OEM板、激光测距模块(无棱镜测距)、数字罗盘和软件控制平台组成,如图1所示。该系统可手持,车载,船载或机载进行移动测设。但随着GPS定位精度与激光测距系统的测距精度亚米级的实现,主动式定位系统的定位精度也将随之提高,因此,主动式定位系统将在许多领域中有着广泛的应用。
GPS-OEM板主要完成测点信息的采集,实时提供测设点的空间坐标并为整个系统提供时间基准,激光测距模块获取测点至目标点斜距信息,数字罗盘获取测点的角度信息,所有的数据通过串口发送至控制终端,软件平台实现数据的实时接收、存储,解算目标点的三维坐标,同时负责整个系统的监视以及向各模块发送控制命令。
1 主动式定位系统组成
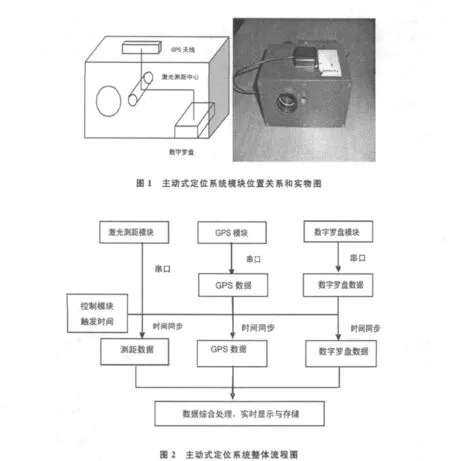
主动式定位系统由GPS模块、激光测距模块、数字罗盘模块、中心控制模块组成。中心控制模块由计算机代替(技术成熟后将嵌入到手持设备中),提供可视化的操作界面,相应的串口命令提示语言,满足数据通信与时间同步要求。对数据进行实时采集、传输与处理,并给出相应组件或相应数据传输的指示信息。
启动系统后,激光测距仪瞄准目标,计算机对激光测距模块发送外部触发脉冲,激光测距模块通过串口返回测距数据。对GPS模块发送外部触发脉冲,读取脉冲发射时间。三维数字罗盘从系统启动开始通过串口连续数据输出,20 Hz/s。使用同步触发脉冲对GPS组件和激光测距组件进行同步的精度优于10-5s,符合系统对时间同步精度要求。
获取脉冲发射时间GPS模块和数字罗盘模块的数据,进行采集和预处理。主要是判断GPS数据,激光测距数据,数字罗盘数据的可用性,正确性和时间延迟是否满足要求,对不满足要求的数据进行整组剔除,对于满足要求的数据进一步处理,并记录相应组件信息。然后对数据进行解算及实时显示,保留原始数据,用于后处理的精密定位计算。图2就是流程图。
2 系统实时数据传输格式
2.1 GPS原始数据
2.1.1 GPS定位数据
GPS的定位数据主要由#RANGEA、#RAWEPHEMA、#IONUTCA开头的三组数据组成,包括卫星距离信息、星历信息、电离层及 UTC时间信息。其数据格式如下:


3,1342,115200,//PRN(卫星编号),参考时间:周,参考时间:秒


2.1.2 GPS外部事件触发信息数据
外部事件触发信息数据是指GPS-OEM板接收到激光测距模块的触发TTL信号,实时提供的触发时刻的GPS时,通过该时间数据为系统提供测距的时刻。采用了NovAtel自定义的数据传输格式传输“#MARKTIMEA”语句输出和数据传输。其语句如下:

2.2 激光测距数据
激光测距数据是测设点与目标点之间的斜距信息,采用了厂家自定义的数据格式,其语句如下:
L 2562.5 m
2.3 罗盘数据
数字罗盘可以实时测量系统的三维姿态,用于实时测量系统的方位角、俯仰角信息。采用了厂家定义的数据传输语句“$PTNTHPR”,其语句如下:

3 GPS数据进行编码解译
由Nov Atel接收机接收的原始数据是由#RANGEA、#RAWEPHEMA、#IONUTCA 开头的三组数据组成,接收机产品本身自带数据转换软件,但是数据接收完毕后的转换,无法用于系统的实时解算,需要自己对原始数据进行实时转换,主要包括测量数据的转换和星历原始数据的转换。
3.1 测量数据文件数据的判读与转换
以#RANGEA开头的数据中包括了该观测历元时刻的时标、该历元所观测到卫星的数量、该历元所采集到的所有观测值、观测标准差。测量文件由头部和数据两部分组成,其头部的规定性文字多,基本不涉及计算,这里就不赘述了。测量文件的数据部分相对简单,不过因为其来源没有像ICD-GPS-200这样的文档来规范,各个厂家的数据格式大不相同,虽然转换的结果以RINEX为准,但也随着接收机的不同而不同。NovAtel公司接收机的测量数据直接给出了伪距、载波相位等值,所以,只要按星号顺序把观测卫星的C1、L 1、L 2、D1、D2等数据一一按RINEX格式排列数据即可。
3.2 导航数据文件数据的判读与转换
NovAtel接收机接收的导航星历数据特点:每条数据包括 3个子帧,分别为 SUB1、SUB2、SUB3。每个子帧包括10个字(Word),每个字长为24 bit,不包括校验码,如图3所示。接下来的工作就是将指令对应的含义求出来,将数据的每个字节都表示为二进制。因为,对这些需要计算参数的量级和精度都有着高要求,且在RINEX文件中表示变量的方法都是科学计数法,所以涉及到具体计算的变量都要设为double型。在具体计算这些变量的时候,还必须注意几点。

图3 星历数据格式subframe1
例如,图3中,TGD,该变量有一个注释,标明它是2的补码。这就是说该变量是用以2为模的补码形式表示的数(最高的bit位是符号位),即:如果它大于0,那么因为正数的补码就是其本身,可以直接求出;但如果它小于0(最高位为1),情况就完全不同,比如11111001≠-01111001,而等于-(00000110+1)=-00000111。要快速求出一个补码表示的负数的真值,方法为:对于n位二进制数,X真=X补-2n。其次,按照补码形式求出每个变量的真值后,还要将变量乘以其尺度因子。例如TGD的尺度因子为2-31。最后,要检查变量的单位,例如 Δn,其单位为“半周/秒”,但在 RINEX中,它却是“radians/sec”,所以还要将其乘上π=3.1415926535897932384626433832795,凡是“周”的地方都要乘上π。
在1~3子帧中,可以计算出下列数据:

使用这些参数就可以得出 RINEX的导航数据文件,此文件由“头”和“数据”两部分组成,其中“头”的格式比较灵活,除了必要的几项以外还可以添加注释,而“数据”就是上述参数的排列,具体如图4所示:

图4 导航文件数据排列顺序
4 数据的分离存储
数据通过串口传送至数据控制中心,数据中心就要对多个串口通道内的数据进行处理,包括不同数据语句分离、语句读取并存储数据。
语句分离就是从该通道字符串队列缓冲区中分离出各个格式的语句,包括“$GPGGA”、“#MARKTIMEA”、“$PTNTHPR”、“L”。可以采用语句队列的方式实现各语句的分离,由于所有数据格式对应的语句都采用了类似的格式,通过语句的标识符提取各语句,同时将语句进入语句队列。对语句队列中的各个语句进行相应语句的数据读取,获取相应的数据。同时将该语句提取出队列。
软件控制中心首先要判断数据的有效性,判断数据的有效性首先要判断GPS,数字罗盘的数据是否有效,通过解析串口传回的字符串,就可以判断GPS和数字罗盘工作是否正常,以上两个设备正常工作后,软件中心对激光模块的数据通道进行初始化,激光模块进入工作状态。激光模块进行测距后,若GPS没有收到激光模块发出的 TTL信号,数据不进行记录。
软件控制中心通过分离,提取数据。对于GPS的数据,进行单点定位,求得各个历元时的三维坐标,得自定义的数据格式如下:
“触发时间信息、$状态信息、测设次数、X Y Z(测设点坐标)、L(斜距)、Heading(方位角)、Pitch(俯仰角)、Roll(翻滚角)”
主动式定位系统的准实时处理采用这一数据格式,数据片段如图5所示。

图5 主动式定位系统数据格式
5 数据处理精度分析
主动式定位系统的实时处理功能是指在完成一次测试后实时提供待测点的概略坐标。单一测站计算公式如下

式中:(X,Y,Z)为待测点目标;(x,y,z)为测设点目标;d为斜距;α为方位角;β为俯仰角。由于在定位中利用了数字罗盘的方位角和俯仰角信息,数字罗盘为磁传感器可能会在测角时存在误差,因此,实时定位的结果只能为用户提供待测点的概略坐标。
当测站数大于3时,进行多点距离交会,图6为5组多点距离交会的结果。
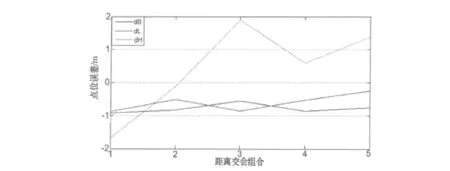
图6 距离交会点位误差
用数据进行距离交会的同时,加入测角信息进行平差处理,所得结果如图7,只用距离数据进行定位高程精度较差,但加入罗盘的角度信息进去再进行解算,能大大提高高程的定位精度,且比前面的定位方法精度有所提高。

图7 边角交会点位误差
6 结 论
讨论了主动式定位系统的组成,工作模式及其实时定位精度,通过数据分析,可以看出,主动式定位系统能够实现自主实时远距离不接触目标物的三维坐标点位获取,其实时定位平面精度可达米级,高程精度略差。在以后的研究中改进算法,提高定位精度以提高待测点的定位精度。再加上该系统的便捷性、实时性、无需设立站标,一人即可操作等优点,该系统将具有很好的研究意义与实用价值。
[1]李征航,黄劲松.GPS测量与数据处理[M].湖北武汉.武汉大学出版社,2005:182-202.
[2]何海波.高精度GPS动态测量及质量控制[D].河南郑州:解放军信息工程大学,2002:36-42
[3]ALTMAYERC.Ehancing the intergrity of integrated GPS/INS system by cycle slip detection and correction[C].Proceedings of the IEEE intelligent Vehicles Symposium Dearborn,Miami,October 3-5,2000:174-179.
[4]DEDES G,MALLETT A.Effects of the ionosphere and cycle-slips in long baseline dynamic positioning[C].Proceedings of Mobile Mapping Symposium,Columbus,Ohio,May 44-26,1995:142-152.