移动闭塞信号系统的列车定位方式
2010-07-05赵家炜
赵家炜
(广州市地下铁道总公司运营事业总部,510380,广州∥工程师)
列车运行间隔的控制是信号系统列车控制的核心。目前,行车闭塞方式可分为固定闭塞、准移动闭塞和移动闭塞。移动闭塞与固定闭塞的区别在于:
(1)闭塞分区的划分不同。移动闭塞没有划分固定的闭塞分区,列车间隔是动态的并随着前一列车的移动而移动。固定闭塞则将线路划分为固定位置及某一长度的闭塞分区,一个分区只能被一列车占用。
(2)列车间隔的不同。移动闭塞的列车间隔是按后续列车在当前速度下所需的制动距离加上安全余量计算和控制的,可确保列车安全分隔。固定闭塞的列车间隔为若干闭塞分区,与列车在分区内的实际位置无关。
(3)制动不同。移动闭塞制动的起点和终点是动态的,轨旁设备的数量与列车运行间隔关系不大。固定闭塞制动的起点和终点总是某一分区的边界。
(4)传输信息量大小不同。移动闭塞采用先进的通信,确保车-地双向传输,传输量大。固定闭塞采用模拟轨道电路传输,信息量少 。
移动闭塞系统的首要设计原则是确保行车安全和提高通过能力。通过提高列车定位分辨率和移动授权更新率可提高线路容量,并缩短列车运行间隔。如何更精确地实现列车定位,就成为一个移动闭塞信号系统的关键。
1 阿尔卡特S40信号系统的组成及功能
图1为阿尔卡特S40信号系统结构框图。系统基于移动闭塞原理,通过3层控制结构实现相应的责任分工,保证系统安全、可靠、有效运行。各层功能概述如下:
管理层——系统管理中心(SMC),提供列车自动监督(ATS)功能。
操作层——列车控制中心(VCC),提供列车自动防护(ATP)、列车自动驾驶(ATO)和联锁功能,VCC与车载控制系统(VOBC)实现完整的ATP及ATO功能。
执行层——由车载控制器(VOBC)、感应环线、车站控制器(STC)等组成。每辆列车的VOBC负责在VCC的限制下自动安全驾驶列车。列车与轨旁设备间的通信采用感应环线传输系统。STC根据VCC的命令(由VCC计算并保证联锁条件的满足),通过安全继电器来转动道岔。道岔状态、轨旁设备状态(包括紧急制动设备、屏蔽门、信号机等)由STC回送给VCC。可根据实际线路长短的不同设置多个VCC。
系统可以实现以下功能:
·防止列车敌对移动造成的冲突;
·防止道岔错误转动或错误设置而造成的冲突;
·防止因车门意外打开、列车倒溜等造成的乘客伤害;
·防止因列车超过线路允许限速或指令速度而造成对线路的损害;
·通过车-地双向通信系统连续不断地监测列车在整个系统中的位置;
·列车间以所需的安全距离(SD)安全地分隔;
·安全停车距离根据线路限速、车辆和列车自动控制(ATC)特性进行计算;
·按照安全行车和线路限速的要求对列车进行限速;
·监测整个系统内的列车运行方向;
·监测列车无人驾驶运行;
·监测列车倒溜;
·车轮空转或滑动补偿;
·检测列车运行方向中的障碍物;
·提供车门及屏蔽门控制的安全联锁;
·对中央和站台紧急停车按钮的监督管理;
·提供对各种列车运营模式以及对各个模式间的切换的安全监督;
·检测列车完整性和列车控制线监测;
·在ATP功能施加的限制范围内调整列车运行时间和(或)列车速度,并在乘客乘坐舒适度标准范围内控制、调整列车行驶;
·无人折返运行;
·车站精确停车,包括门的开关。

图1 阿尔卡特S40信号系统结构框图
2 感应环线通信系统
感应环线电缆是一个带有绝缘和非屏蔽外壳的标准铜线。对于感应环线通信系统,该电缆既是发射天线又是接收天线。该电缆在钢轨间按照大约间隔25 m有一个交叉点的方式铺设。VCC在逻辑上将环线划分为不同的环线区段。每个环线受各自环线通道的驱动,通过相应的轨旁RLB(远端环线盒)作为分割点。这样,感应环线就以“环线→环线区段→环线交叉”的方式被分割开。每一个感应环线区段对应一个环线ID识别号(LID)。
3 列车定位方式分析
列车定位系统分为车载定位设备和地面辅助定位设备两部分。车载定位设备主要包括:安装于车轴上的测速电机,车载ATP计算机,车地通信设备等。地面辅助定位设备包括:安装于地面的交叉感应环线或应答器。系统通过车载定位设备和地面辅助定位设备,并结合车载线路数据库来建立列车位置信息。
列车上的VOBC通过状态测量系统(SMS)决定列车位置。SMS由粗略定位和精准定位测量系统组成。
3.1 粗略定位
粗略位置测量通过计算一个环线中的交叉点数目来完成。每隔25 m标定一处环线交叉。
粗略定位基于在感应环线电缆上传送的信息——环线识别号(LID)和感应环线电缆(交叉)物理坐标的改变。LID将车辆位置分配给一个物理环线。ATC系统在逻辑上将环线划分为几个独立的感应环线,每个环线接受各自环线通道的驱动。VCC在环线通道上传送命令报文给指定的VOBC;如果车辆识别号匹配,“登载”VOBC发出响应报文,确认VOBC位于由环线通道驱动的环线区的某个位置。
VOBC通过使用2个相同的用于接收VCC命令报文的天线来进行交叉检测。2个天线均接收来自环线电缆的36 k Hz数字频率调制(FSK)信号;同时将VOBC处理好的数据信息以 56 k Hz FSK信号,通过环线电缆传输至VCC。车-地通信为实时的全双工通信。2个接收天线接收信号之间的相位关系在环线交叉间保持平稳。然而,由于系统在2个天线之间设有偏移距离,故只有当2个天线再次处于交叉环线的同一侧时,它们的相位关系才会变成一致。相位的变化使交叉检测得以实现。
知道了从环线始端开始的交叉个数及交叉点的间隔(25 m),就能知道车辆的位置。当列车进入一个新的环线区(根据接收命令报文中的LID识别)时,此数值被重置。
3.2 精准定位
使用测速发电机生成的信息能准确地确定交叉环线之间的车辆位置。TWR(定位计算机)中的精准定位测量系统使用从测速发电机处获得的行车方向和距离,从而对车辆位置编号进行计算。
系统设置车辆定位编号(VHPN),按环线交叉间距的1/4(即6.25 m)来计算。VHPN单元中有来自于VCC的目标点信息和来自于VOBC的车辆位置信息。这些信息从环线边界始端开始计算。
根据行车方向,VOBC增加或减少VHPN计数。任何环线的最大VHPN为512。VOBC从0开始往上计数或从511开始往下计数。命令报文规定了VHPN的计数方向和(缺省的)初始VHPN。进入环线命令报文也规定了VHPN计数方向。
位置的确定主要基于与车辆所处环线的始端相关的车辆位置。来自于VCC的VOBC目标点信息也与环线始端相关。如果目标点在下一个环线内,VOBC将减去在前一个环线内行驶过的距离,并决定在新环线中的目标点。新环线中的命令报文包括经VOBC计算的相同目标点。
通过以上两种定位后,可将列车定位精确到6.25 m,有效地提高了列车分辨率。列车定位示意图如图2示。
根据线路实际情况,环线铺设长度有所变化,最长可达3.2 km。道岔区域同样铺设环线,不设置轨道电路,不设置绝缘节。图2所示的测速仪脉冲由车载测速仪的性能参数所决定。现场采用HASLER测速仪。列车在车站停车时,利用轨旁接近传感器(列车在站台定位的硬件设备)使得停车精度达到±0.2 m。
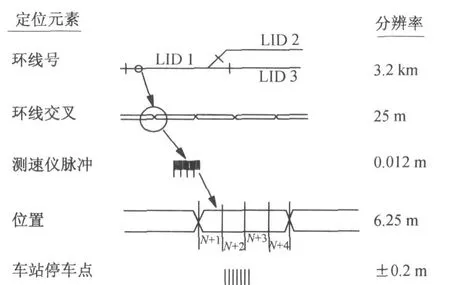
图2 列车定位示意图
4 移动闭塞技术的优势
移动闭塞系统通过列车与地面间连续的双向通信,实时提供列车的位置及速度等信息,动态地控制列车运行。移动闭塞制式下,后续列车的最大制动目标点较准移动闭塞和固定闭塞更靠近先行列车,因此可缩小列车运行间隔,使运营公司有条件实现小编组、高密度,从而使系统在满足同等客运需求条件下减少旅客候车时间,缩小站台长度和空间,降低基建投资。此外,由于系统采用模块化设计,核心部分均通过软件实现,因此使系统硬件数量大大减少,可节省维护费用。
移动闭塞系统的安全型计算机(如VCC)一般采取“三取二”或“二取二”的冗余配置;系统通过故障安全原则对软、硬件及系统进行量化和认证,保证了系统的可靠性、安全性和可用度。
在广州地铁3号线采用的阿尔卡特S40信号系统,超高峰行车间隔最小达到2 min 52 s,远远小于使用固定闭塞的广州地铁1号线,充分体现出移动闭塞信号系统的优势。
[1]丁正庭.区间信号自动控制[M].北京:中国铁道出版社,1994.
[2]董昱,刘小娟,党建武.安全列车间隔控制系统[M].兰州:兰州大学出版社,2002.