DC-01型地铁车辆改交流驱动前后牵引系统的区别
2010-07-05张九高
张九高
(上海申通地铁运营有限公司维保中心,200031,上海∥电气技师)
上海轨道交通1号线自1992年开通至今,投入运营的列车由最初的16列增加到55列。这55列车是不同时期分别购置的,且车型也各不相同。其中,1~16号是最早购置的西门子直流电动列车,17~29号是后期与2号线同期购置的西门子交流驱动列车,30~39号是庞巴迪交流驱动列车,40~55号是阿尔斯通交流驱动列车。
20世纪80年代,电力电子技术和计算机技术的迅猛发展,特别是采用了大功率的绝缘栅双极晶体管(IGBT)和微机模块化控制后,使交流电机调频调压(VVVF)控制得以实现,这就为具有结构简单、牢固、体积小、质量轻、少维修等一系列优点的三相异步电动机在轨道交通车辆上的发展,拓展了广阔的应用前景。交流电动机取代结构复杂、检修工作量大的直流电动机,是技术发展的必然趋势。
1号线由最初的路线短、客流少,到现在的南延伸至莘庄,北延伸到富锦路,客流猛增。这些客观因素导致列车过量损耗,故障率居高不下,提前进入报废期。为了使直流车型的地铁列车更好地为乘客服务,上海申通集团地铁公司联合中国南车集团株洲西门子电力机车有限公司,在直流车车体不变的基础上,共同合作改造,使列车内部设备国产化,把故障率较高的直流牵引系统改造成结构简单、模块化设计、维修率低的交流牵引系统。
1 改造前后牵引回路的构成
1.1 改造前直流主回路构成
上海轨道交通1号线DC-01型车辆(直-直)主回路是由架空线网通过装在“B”车上的受电弓Q1(见图1)而得到DC 1 500 V电源正极,由轮对通过钢轨回到电源负极。它的构成主要有两部分:①线路滤波;②主回路部分。
1.1.1 线路滤波
线路滤波主要由线路电抗器L1和线路电容器C1组成(见图1)。其中,Q3为高速开关,F1为避雷器,K15是线路接触器,F2为电容充电保险丝,R1为电容充电限流电阻,V1为隔离二极管,K16为电容接触器,R1为过电压保护电阻,U1为电流差动传感器,U2为电压传感器,K17为放电接触器,R2为放电电阻,Q4~Q7为接地装置和接地碳刷。线路滤波的作用是减少外界因素和触网电压波动突跳等对主回路的影响,使主回路得到一个平稳的电源电压,同时也是为了减少电压、电流波动对周围通信、信号等设施的干扰。
1.1.2 主回路部分
主回路部分主要是由二串二并四个直流牵引电机M1~M4组成(见图 1)。其中 K 1~K 8是方向接触器,K9、K10是牵引接触器,K11是制动接触器,K12是预励磁接触器,K 13、K14是磁场削弱接触器,A 2是预励磁装置,R4和R6是磁场削弱电阻,R7和R8是制动串联降压电阻,R9是主制动电阻,U3和U 4是电流传感器,L3为平波电抗器。它的作用是建立牵引工况、制动电路工况和设定电机的转动方向。
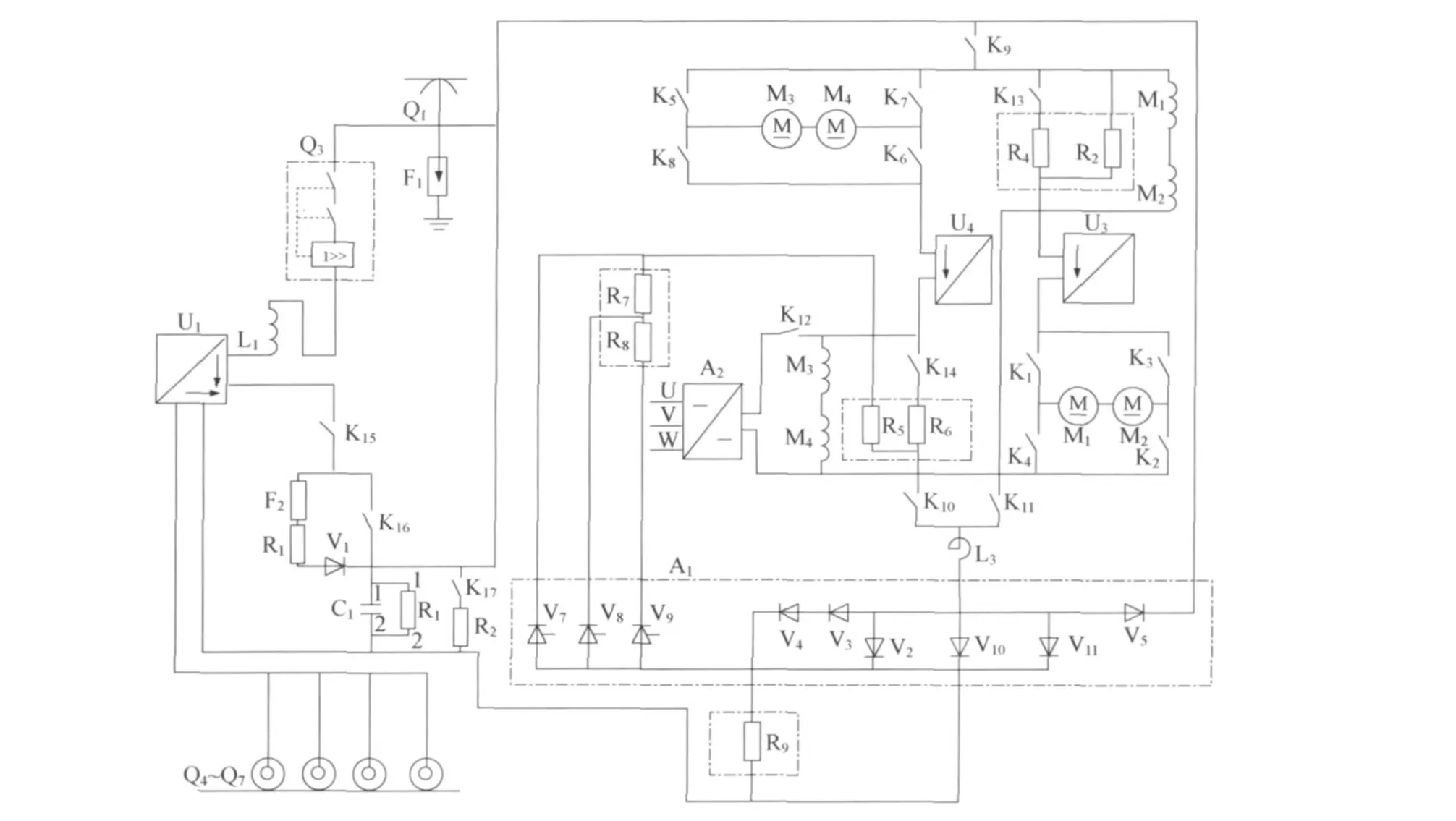
图1 DC-01型地铁车辆主回路电器配置图
1.2 改造后交流主回路构成
改造后交流主回路采用两电平电压型直-交逆变电路。经受电弓接触受流输入的1 500 V直流电由牵引逆变器变换成频率、电压均可调的三相交流电,向异步电动机供电。交流主回路主要由高压电器箱、电抗器箱、制动电阻箱和牵引逆变器箱等组成。
1.2.1 高压电器箱
高压电器箱是主电路的构成部分,主要由隔离开关、电流传感器、熔断器和接触器,以及浪涌吸收器、RV续流回路、快速放电回路等器件组成。
高压电器箱接受来自高速开关(HSCB)的DC 1 500 V高压电源。电流传感器LH1用以检测主回路直流侧电流。浪涌吸收器FS并联在主回路直流侧用以吸收并稳定电压。KM1、KM 2、R2组成预充电回路,保证主电路接通时充电电流不至于太大。R1、V 1回路用于释放电路瞬间的反电势。KM3、R3组成的放电回路在断电状态5 min内将主电容的电压降至<50 V。
1.2.2 电抗器箱
TXL40型线路电抗器是上海轨道交通1号线车辆改造项目主电路的构成部分,它连接高压箱与牵引箱,用来限制直流侧的电压、电流波动,滤除高次谐波。产品的技术参数如下:额定电流为DC 520 A;额定电压为 DC 1 500 V;电感值为 5 MH;冷却方式为走形风冷却。
1.2.3 制动电阻箱
列车电制动时,牵引逆变器将列车动能转变为电能。如果电源网有能力吸收这些电能,则电能被回馈至电网;如果电网无法吸收,电能会被制动电阻吸收并转化为热能消耗掉。
1.2.4 牵引逆变器箱
牵引逆变器是整个交流传动系统的重要组成部分(见图2),由2个逆变模块单元组成。2个逆变器模块驱动4台牵引电动机,电阻制动斩波单元与逆变模块单元集成在一起。
采用株洲西门子电力机车有限公司研制的TGN39型牵引逆变器,它由两个逆变器单元集成在一个逆变器柜中,采用了两个通用的IBBM60G型IGBT变流器模块。单个模块的输出容量可达600 kVA。两套控制器传动控制单元(DCU)合成于一个型号为60R-6U的控制箱中,便于控制和通信。
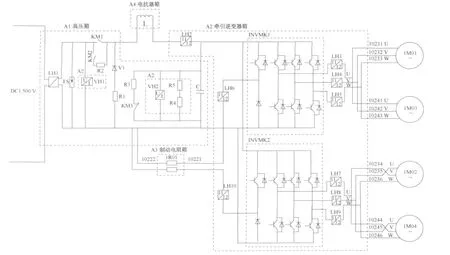
图2 改造后牵引箱内部逆变器图
2 改造前后不同的牵引控制方式
2.1 改造前直流驱动方式的牵引控制
2.1.1 直流驱动方式的斩波原理
斩波器(见图3)作为电动车辆的调速控制系统,接在恒定电流电源和主电路之间。可以把斩波器简化成一个开关,通过接通和关断电路,并控制通和断的时间,使主电路得到一个可调的平均电压。
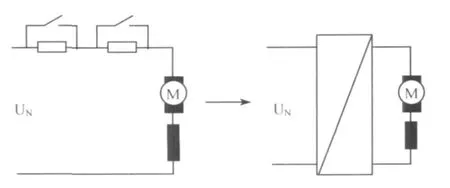
图3 斩波器简化图
通常的直流斩波器采用可控硅,其关断时换流比较复杂,需要一套由电容、电感、可控硅等组成的附加装置对可控硅进行强迫关断,称之为换流电路。而上海轨道交通车辆直流斩波器使用较先进的可关断晶闸管(GTO),不需要换流电路。一个正向脉冲导通GTO,一个反向脉冲关断GTO,从而使斩波器电路的组件数目减少,线路简化,外形尺寸减小,质量减轻。
2.1.2 斩波器高压组成部分
1号线斩波器电路(见图1)主要以主晶闸管V 1和V2的导通和关断为目的。它主要由主晶闸管V1和V 2,大功率可关断晶闸管GTO,电阻制动晶闸管V 3、V 4,续流晶闸管 V 5,短路晶闸管V 10,短接串联降压电阻晶闸管V7、V8,接通串联降压电阻二极管V 9等组成。
2.2 改造后交流驱动牵引逆变器箱内的VVVF控制方式
2.2.1 VVVF控制方式的原理
VVVF是变压-变频(Variable Voltage and Variable Frequency)的缩写,对于变频变压的交流异步电机,其旋转磁场的转速为:

式中:
f——电流的频率;
P——旋转磁场的磁极对数。
因此,转速调节可通过改变磁极对数P或调节电流频率f得以实现。
在变频调速中,由于需要调节电流频率,所以必须考虑定子绕组的反电动势对定子电流及磁通的影响。定子绕组反电动势有效值可以表示为:

式中:
k——比例常数;
f——定子电流的频率;
N——每相定子绕组的匝数;
φ——主磁通的振幅。
当f下降时,E也下降,则电源电压U与E之间的差增大,定子电流变大。在交流电机中,定子电流由两部分组成,小部分用于建立主磁场,大部分则提供给转子侧。由于转子侧的负载并未增加,所以励磁电流必增大,因而磁通φ增大。而φ增大,又使E增大,达到新的平衡。如果φ不断增加,会导致铁心的饱和,进而引起励磁电流波形的畸变。
如果能保证E/f=常数,则φ可保持不变。由于电源电压U和E近似相等,则在变频中使U/f=常数,即可保持φ不变。即在调速中同时调整电压及频率。
在三相逆变器中IGBT逐相导通,在输出端形成三相电压系统,将中间连接电压供给牵引电机。逆变器输出的频率及电压幅值是可以调整的。相电压的最大幅值取决于中间电路电压。输出电压的幅值可以通过改变IGBT开通的宽度来调整。输出电压波形的频率与逆变器的输出频率一致。一个逆变单元由6个开关型半导体元件组成,在改造后的逆变器系统中采用IGBT。每个IGBT两端并联一个续流二极管,用来维持电机电流的流动。对于交流电机的三个相,每2个IGBT和2个二极管组成逆变器相。每一逆变相都连接着直流连接电路的正、负极,中间的引出端连接电机的一相。将IGBT看做一个能高频工作的开关,可画出逆变电路的等效图(见图4),并分析R、S两端的电压变化情况。

图4 R、S线电压及相电压
在每一逆变相中,两个IGBT(开关)由牵引控制单元控制循环触发,将相应电机输入端与直流连接电路正、负极相连。管子的工作周期为360°,导通与截止周期分别为180°。在同一桥臂上的两个IGBT不可能同时导通。当IGBT导通后,电机输入端上的电压应等于直流连接电路的电压U d或为0。图5反映了电机R、S两端的线电压以及二相相减后得到的相电压U 1-2。
U 1-2=U R-S=U R-U S。由图 5可以看出,两个正电压之间和两个负电压之间的相位差为120°,中间有60°是没有电压的。
同理,可以计算出其他二相的电压:

一个对称的三相系统不同相位之间的相位差为120°。相位的方向是建立在电机电压相位次序上(顺时针或逆时针),这也决定了电机转动的方向。

图5 R、S线电压及相电压
2.2.2 牵引逆变器的高压回路
TGN39型牵引逆变器箱内的中间回路用于稳定中间回路电压。把无功功率供应给感应电动机吸收交流分量是线路滤波器的一部分(和线路电抗器一起)。逆变器由二组三相模块组成(见图2)。每个逆变器模块集成三相逆变器的三相桥臂及制动相桥臂,驱动2台异步牵引电动机。模块还包括了热管散热器、温度传感器、门控单元、门控电源、脉冲分配、支持电容器等,在一定程度上达到了模块化和标准化。模块上IGBT元件之间及与支持电容的连接使用了低感母排,减少了线路上的杂感电感,省掉了吸收电路,使电路更为简单、可靠。模块上散热器采用了热管散热技术,靠走行风自然冷却,使系统更简洁,且无环境污染。
2.2.3 牵引逆变器传动控制单元
传动控制单元(DCU)采用异步电动机直接转矩控制、粘着控制软件和交流传动模块化设计硬件,主要完成对IGBT逆变器交流异步牵引电机的实时控制、粘着控制、制动斩波控制,同时具备完整的牵引变流系统故障保护功能、模块级的故障自诊断和一定程度的故障自复位功能。株洲西门子电力机车有限公司自主研发的DCU模块化硬件,采用标准的6U机箱式结构,模块化插件插装在机箱内(见图6)。

图6 DCU布局接口图
设备得电时,DCU会执行一次自检,检查高压电器箱中的KM 1、KM2接触器是否能正常吸合与断开,并判断牵引回路是否能达到牵引条件。DCU接收到司机室发出的向前或向后方向控制指令后,断开放电接触器,闭合主电路充电接触器,当支撑电容电压在一定的时间(约4 s)内上升到一定值(约为网压的95%)后,闭合线路接触器,充电完成,形成牵引回路。DCU根据本车载荷信号发出触发脉冲,控制牵引逆变器根据牵引及电制动特性输出一定频率和电压的三相交流电给牵引电机,产生列车的轮缘牵引力(电制动力),同时检测电机的转速信号,对列车进行防空转及防滑控制。当列车运行时,DCU监测主电路及逆变器的各种状态及故障信息,对主电路及逆变器实施完善的安全保护措施。DCU主要实现的保护项目有:网压过高、过低,支撑电容直流过压、欠压,直流侧总电流过流,主电路接地(差动电流保护),IGBT模块故障等。
DCU模块化插件的功能如下:
(1)开关电源板,主要提供+5 V、+15 V、-15 V、+24 V、-24 V电源,为机箱内各插件、风扇冷却装置、电流电压传感器、速度传感器等提供直流电源。
(2)数字入出板,包含16路110 V数字输入(110 V/5 V)、8路110 V 输出(5 V/110 V)。110 V输出采用继电器输出电路。
(3)通信接口板,主要完成DCU与列车通讯网MVB总线的数据通信及与单板机的数据通信。
(4)电机控制板(MCC),是一块微机板,采用三个数字信号处理器(DSP)来进行实时计算,主要实现异步电动机的直接力矩控制、速度的处理、电机温度的计算及过压斩波的处理。
(5)电机信号板,是电机侧控制的一块外围板,它对4台电机的4路速度信号进行滤波处理、二选一、方向判断;具有逆变器的过流保护、中间直流电压过压保护、斩波过流保护;对逆变器输出电流、电压信号进行滤波、整流、放大等以形成有效值。
(6)模拟输入,其采样的信号有电机1温度、电机2温度、电机 3温度、电机 4温度、网压、直流电压、直流电流、载荷信号等。
(7)脉冲转换,它对电机控制板发出的逆变器型号、斩波信号进行脉冲转换,即将+5 V幅值的脉宽调制(PWM)信号转换成+24 V幅值的信号送至逆变器机组;同时,它接收元件故障状态信号反馈,并进行+24 V到+5 V的信号幅值转换,送电机信号板汇总并用于故障保护。
(8)解调器,将输入的司机指令(PWM信号)转换成0~10 V的模拟信号,送至MCC采集。
3 改造前和改造后的电机区别
3.1 改造前直流牵引电动机的主要参数
型号:CUS5668H;功率:207 kW;
额定电压:1 500/2 V;
额定电流:305 A;
额定转速:1 470 r/min(相当于车速35.5 km/h);
最大转速:3 140 r/min(相当于车速80 km/h);励磁方式:串励;
磁场削弱系数:93%和50%;传动比:5.95。
3.2 改造后交流异步牵引电动机的主要参数
型号:JD118A;
功率:190 k W;
定子频率:60.87 Hz;
电压(基波):1 050 V;
电流(基波):131 A;
转矩:1 008 Nm;
转速:1 800 r/min;
效率:0.927;
功率因数:0.867;
级数:4;
最大转速:3 280 r/min;
传动比:5.95。
4 结语
改造前和改造后的列车最大的区别就是在设计理念上有了很大的进步。直流换向的诸多接触器被全部摒弃,变成了现在的软件控制,这就减少了由于接触器的问题而导致的故障,也减少了维护接触器的工作量;斩波器中的分立元件被逆变器模块化元件取代,直流牵引电机改为交流异步牵引电机,使故障率和维护的工作量进一步下降。
上海轨道交通直流列车改交流列车的试点已经在102#车上完成。经过一年多的运营,该列车车况良好,故障率明显下降。目前,直流列车的改造与“6改8”项目正在一并进行。到时我们看到的将是壳体没有变化但内部器件崭新且国产化的8节编组列车。
[1]成竞立,余强,朱小娟,等.车辆电器与控制[R].上海:上海地铁维保中心车辆分公司,2002.
[2]余强,朱小娟,周俊龙,等.AC 01/01型地铁列车电气部分[R].上海:上海地铁维保中心车辆分公司,2006.
[3]徐征,陈晨.102#车使用维护说明书[R].中国南车集团株洲西门子电力机车有限公司,2007.