交流电机无传感器低速驱动技术分析
2010-06-26王庆龙张兴张崇巍王敬生
王庆龙,张兴,张崇巍,王敬生
(1.合肥学院 电子信息与电气工程系,安徽 合肥 230601;2.合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
1 引言
自从20世纪70年代以来,无速度传感器的高性能交流电机驱动系统一直受到国际电气传动界的普遍关注,这项可控驱动技术在工业生产和经济上具有很大的吸引力,减少硬件的复杂性和降低成本是其中最明显的两项。其次,减少传动机构的尺寸、清除传感器电缆、更好地避免噪音、提高可靠性、减少对维护的需求。此外,在有害环境中工作常常需要强制采用无速度传感器的电动机[1~3]。
文献[1]总结了无速度传感器控制方法,并归纳成两大类6种方法:
1)基于电动机的基波模型,包括开环模型和闭环观测器;
2)利用电机的各向异性性质如转子槽谐波、主电感饱和、人为的凸极、转子槽漏磁。
早期的关于交流电机无传感器控制的文献可以追溯到1975年,文献[4]描述了一种恒压频比方案,采用转差估计器从已知的定子频率信号中导出机械角速度。自从文献[5]提出了不带速度传感器的矢量控制驱动系统以来,产生了一大批各有特色的交流驱动无传感器控制方法[1,2,5~10]。
近年来,对于交流电机无速度或位置传感器驱动技术的研究更加深入。尽管取得了很大的进展,但极低速稳定运行仍然存在问题[1,2,6]。对于该技术存在的大量文献进行恰如其分的比较分析存在困难,原因在于至今还没有一种为大家所承认的标准的无速度传感器控制系统。论文给出了近年来文献中提高交流电机无传感器低速控制性能的若干解决方案的要点及一些在无传感器条件下观测的结果并进行了分析,从而对进一步研究提出可能新颖的建议。
2 基于电机基波模型的方法
无论是开环计算转速,还是闭环的观测器构造转速,都是以交流电机的动态数学模型为基础。在研究动态数学模型时所做的基本假设是:电机气隙表面均匀,磁动势和磁通密度沿气隙周围按正弦规律分布,忽略空间谐波和其它次要因素等,因此这个模型仅是基波模型。
2.1 模型参考自适应系统MRAS
模型参考自适应系统(MARS,model reference adaptive system)法是由Schauder C.首次提出的[11],也是首次基于稳定性理论设计交流电机转速的辨识方法,状态和速度的渐近收敛性由Lyapunov方程和Popov超稳定性理论保证。其主要思想是将含有待估计参数的方程作为可调模型,将不含未知参数的方程作为参考模型,两个模型具有相同物理意义的输出量,利用两个模型输出量的偏差根据一定自适应律来实时调节可调模型的参数[12]。基本的MRAS框图如图1所示。
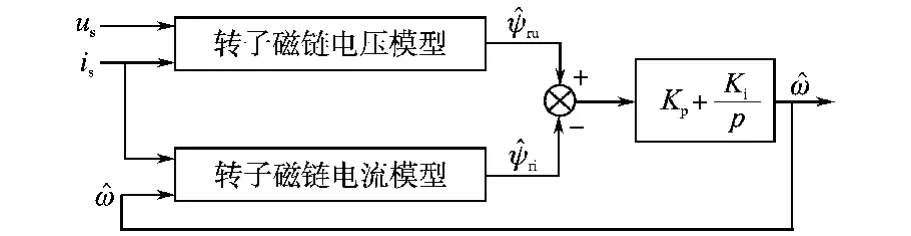
图1 基本的MRAS框图Fig.1 Schematic of basic M RAS
在基于工业应用开发的初期,Schauder[11]将MRAS方法应用于1台交流感应电机,在定子频率为2 Hz以上获得了良好性能。文献[13]提出了一种具有较好性能的转矩型MRAS。通过一个与转子时间常数匹配的滞后电路,可以减小电机参数尤其是定子电阻的影响,并给出了在1台印刷机上的应用情况,在0.1%额定速度时可以稳定运行,给出了在18 r/min或额定速度的 1/100的实验结果。
为了改善低速估计性能,近年来采用了参数自适应方法。文献[14]报告了一个间接矢量MRAS,用于1台永磁同步电机PMSM转子磁链和定子电阻估计,给出了2 rad/s的运行情况。文献[15]针对交流感应电机驱动,在MRAS中使用了自适应神经网络预测模型,并与较早的MRAS方法进行了比较。实验转速为正反转±50 rad/s和±10 rad/s,低速实验为5 rad/s。因采用自适应模型,从给出的零速实验情况看是可行的且比以前好。文献[16]提出了一种新颖的基于定子电流的MRAS速度估计方法,分析了感应电机等效电路参数以及MRAS方案自适应系数对估计的磁极位置及整个驱动系统的稳定性的影响,分别给出了极低速14 r/min和7 r/min实验结果,瞬时速度偏差接近零。
与其它基于模型的方法相比,MRAS方法比较简单且实现时比较经济[2]。文献[17]将一个基本的转子磁链MRAS与EKF估计性能进行了比较。EKF对参数变化具有较好的鲁棒性,但MRAS比较简单(计算的复杂性之比几乎为 20∶1),且在低速时甚至更好。性能据说已经能与具有编码器的间接矢量驱动相比,实验采用的阶跃速度为19~96 r/min。
按照Landau关于模型参考自适应控制经典著作中的定义,MRAS的“参考模型”应能代表受控系统性能的准确模型,其输出是自适应控制的期望值,“可调整系统”即受控系统,可以调整其参数或输入以获得尽量接近参考模型的性能。套用MRAS理论时,虽然可以用 Lyapunov函数或Popov超稳定理论来证明系统的渐进稳定性,但实用中需要的却是选择PI参数来调整转速估计的动态品质,以获得准确的动态转速,按照MRAS的理论还难以做到[9]。
2.2 卡尔曼滤波KF
卡尔曼滤波是由R.E.Kalman在20世纪60年代初提出的一种最小方差意义上的最优预测估计的方法,它的突出特点是可以有效地削弱随机干扰和测量噪声的影响。扩展卡尔曼滤波EKF算法则是线性卡尔曼滤波器在非线性系统中的推广应用。KF在信号处理中是一种比较先进的技术,并在驱动中获得广泛应用。文献[18]提出了基于EKF的感应电机直接矢量控制中转子电流或转子磁链矢量及转子电阻估计方法。文献[19]针对EKF存在的主要问题EKF协方差矩阵的选择,提出了一种通过自调整程序直接选择矩阵的方法,避免了常规的通过反复实验选择矩阵,并将这种方法用于面装式PMSM转速估计,但并没有给出低速实验结果。文献[20]描述了具有电压和电流传感器基于EKF的感应电机矢量控制和直接转矩控制系统,但电阻值和转动惯量使用测量值。低速实验表明,估计速度偏差为2~4 r/min,零速运行持续时间为64 s。文献[21]提出了一种PMSM无传感器矢量控制系统,采用并联降阶 EKF进行转速和位置估计,并与常规的EKF进行比较,实验转速为100 r/min。特点是可以大大节省计算机资源,但随着数字信号处理技术的持续发展,这种折中方法已无太大意义。
文献[22]总结了常规EKF存在的不足,主要包括复杂的雅可比矩阵计算;由线性化和不正确的参数导致的不稳定性;高斯白噪声假设和缺少适当选择模型协方差的分析方法等。提出了一种UKF(unscented Kalman filter)方法以克服常规的EKF存在的不足,并将提出的方法用于感应电机转速估计。因对测量噪声更加敏感,因此没有给出低速实验的结果。
影响KF和EKF低速估计的因素是电机定、转子电阻等参数变化。转子电阻变化的影响因素主要有两个,即温度和集肤效应。温度对转子电阻的影响相对缓慢,因此可通过补偿的方法以减小磁链和转矩在稳态运行点产生的漂移。集肤效应对转子电阻变化的影响较快,但在高性能电机驱动中矢量控制通常能维持较低的滑差率,因此在稳态条件下集肤效应比较小。另外,用于变速用途的感应电机不需要直接在线启动,可以将集肤效应设计得很小。此外,转子时间常数也会受到电感磁饱和的影响。
定子电阻是另外一个重要的参数。随着频率(转速)的降低,由定子模型方程可知,其影响逐渐增大。另外,其值随温度变化可达 50%,因此,不能简单的采用固定不变的定子电阻。在稳态和偏差受到限制时,或许可以在1 Hz速度运行[3]。

与MRAS相比,扩展卡尔曼滤波法提供了一种迭代形式的非线性估计方法,避免了对测量量的微分计算,其性能取决于滤波器矩阵的选择,不足之处是计算量很大、低速时对参数变化敏感,且这种方法是建立在对误差和测量噪声的统计特性已知的基础上的,需要在实践中摸索出合适的特性参数。
2.3 观测器
将MRAS或EKF与自适应结合构成闭环观测器能够增强抑制偏差和噪声的鲁棒性[1],常见的形式包括滑模观测器和全阶非线性观测器。
文献[23]描述了在电驱动系统中滑模控制原理及其应用,该论文得到了广泛的引用。文献[24]将积分滑模控制用于感应电机矢量控制系统,进行了参数变化范围为20%的鲁棒性实验,实验阶跃速度大约从800 r/min到1200 r/min。文献[25]提出了一种感应电机变结构控制方法,使得电机在额定负载下能运行于极低速,并给出了在额定负载下运行速度为3 r/min的实验结果。文献[26]提出的感应电机滑模电流观测器结合了定子电阻自适应辨识,声称在零速和低速具有很高的估计精度,并给出了24 r/min实验结果。文献[27]采用逆系统方法将感应电机的转速和转子磁链进行动态解耦,并由扩展的Kalman滤波器对转速及转子磁链进行实时估计,给出了整个调速范围内进行高精度的转速和磁链估计的仿真结果。
文献[28]提出了一种改进的感应电机定子磁链定向直接矢量控制系统,定子磁链采用闭环估计,转子速度采用MRAS估计,给出了仿真和轻载实验结果。50%负载时低速运行实际转速为4.8 rad/s,估计转速为6 rad/s;空载时低速运行估计转速与实际转速一致。文献[29]提出一种新颖的自适应全阶Luenberger观测器用于感应电机转速估计,给出了正反转为±100 rad/s的实验结果和小于2 rad/s的极低速实验结果,具有定、转子电阻自适应的零速运行。文献[30]基于扩展电动势、逆变器非线性补偿和定子电阻自适应提出了一种感应电机转子磁链闭环观测器。给出了正反转为±5 rad/s实验结果,称零速运行令人满意。但在阶跃转矩变化为三分之一额定负载下,转速偏差约20 rad/s。文献[31]提出了一种改进感应电机磁链估计和定子电阻自适应方法,采用偏差衰减机理解决直流飘移问题,给出了正反转±90 r/min实验结果。文献[32]提出了一种感应电机全阶自适应观测器,可用于包括极低速的定子或转子磁链定向控制,零速稳定运行存在困难,但可以平稳地经过零点而不影响驱动的稳定性。
文献[33]在回顾无刷永磁电机无速度传感器运行时指出,近来发展主要集中于闭环观测器方法的研究。这种估计器通常包括一个具有详细电机参数的简单电机系统模型,但无电机模型变量可能更适合于变化的负载或未知负载。文献[34]较早采用EKF方法,对1台无刷直流电机速度和转子位置进行估计,实验结果为额定速度5%以上时电机参考速度和实际速度最大稳态偏差为±1%。文献[35]采用具有M RAS的变结构方法,选取永磁电机本身作为参考模型,而选取永磁电机电流模型作为可调模型,用于面装式的永磁电机转速辨识,给出了全速范围的仿真结果。文献[36]基于电机的电流模型,给出了一种具有KF的自适应滑模定子磁链观测器,用于基于DTC的内永磁同步电机IPMSM驱动系统。实验结果为电机在半载情况下稳定运行于10 r/min,约为额定转速的0.79%。
2.4 基于电机基波模型的方法存在问题
基于电机基波模型的方法存在低速稳定运行困难的问题,其主要原因如下[1]。
1)信号获得存在偏差。由式(1)可知,即使采用理想积分器,信号中微小的直流成分也能使得估计的磁链产生偏移,因此,极低速运行存在一个基本极限。
2)逆变器存在非线性。逆变器存在非线性死区影响,欲获得良好的低速性能应进行补偿;功率装置正向电压降落也会产生非线性,需要通过建模解决。其它影响包括对电压降落和对电流反向的准确位置的死区时间补偿的敏感性。因此,通过PWM估计定子电压矢量会变得不精确。
3)模型参数不准确。模型参数可以在试运行阶段确定,可以采用离线的方法或者用逆变器自测试的方法以增加估计的准确性如用直流实验寻找转子电阻初始值。
开始出现无速度传感器控制的高性能通用变频器产品时,最低工作频率仅为5 Hz,低速运行时误差较大。近10年来,经过研发工作的努力,一些高档产品的最低频率已达0.5~1 Hz。Holtz[1]认为基于电机基波模型的方法最低频率“接近0 Hz,或暂时为0 Hz”,后者是指在过渡过程中经过0 Hz。这样的结果已能满足许多工业实际要求了,但更低频率的稳定运行还做不到。
3 利用电机的各向异性性质
要解决交流电机无速度传感器控制系统0 Hz附近的稳定运行,就必须另辟蹊径。高频信号注入的辨识方法有着重要的实际应用潜力,许多学者对此展开了较为深入的研究[1~3]。
在信号注入SI方法中,通常向电机中注入附加的高频、低幅值信号。由于注入的信号频率很高而幅值较小,Holtz[1]认为,这种注入的高频信号对电机的基本特性影响较小。注入的信号可以是三相对称的,产生一个高频旋转磁场,也可以在预定的某个空间方向上产生一个特定的交变磁场。这些信号被实际电机中的各向异性在空间加以调制,然后被加工、解调以获得所需的测量量。此外,在一个PWM控制系统中,开关波形中的高频成分可以代替注入的周期性高频信号。
对于感应电机来说,转子基本模型是圆柱形的,在零速时不能提供转子位置或磁场角信息。而基于非模型的方法,即利用感应电机的各向异性获得转速信号,可以完全不受数学模型的限制。感应电机的各向异性特性主要形式有:通过感应电机鼠笼型转子中的转子导条产生的各向异性,而这种各向异性可以通过人为设计获得,如使转子齿槽的宽度在转子圆周上按极距周期性变化、使转子导条在转子表面下的深度按周期性变化、使双笼转子的外层鼠笼条或内层鼠笼条的导体电阻按周期性变化等;其次,由于基波磁场在漏磁路产生局部饱和而引起磁路的各向异性;另外一种常见形式的各向异性是在d轴,因为d轴附近气隙处的高频磁场时间常数最大,使得d轴总漏感最大。感应电机中的各向异性有着不同的空间方位,如基波磁场的位置、转子导条极距内的导条对应的位置等。这些各向异性对高频注入信号产生响应,因而通过注入信号或直接经过逆变器开关获得的高频激励可以检测出各向异性的空间方向。通过检测这种各向异性可以确定转子的位置角,转子位置角的变化可以用来获得电机转速。文献[37]采用转子槽追踪和零序电流技术对接近标准的感应电机在零速和低速时的转子位置进行估计。实验电机为三角形连接,负载为空载和30%额定负载,进行0~10 r/min的实验,平均位置偏差机械角度为0.6°。文献[38]利用高频信号注入技术,采用补偿和卡尔曼滤波KF,对1台标准的闭槽笼型感应电机在零低速矢量控制时的转速进行估计,给出了±30 r/min的实验结果。文献[39]提出了一种速度估计方法,该方法基于载波信号注入及标准的气隙光滑的两轴感应电机模型,并结合了MRAS方法。据称,在机械转动惯量很高的假定条件下(尽管假设不能成立)具有较宽的运行速度范围,包括零速和基本频率。给出了阶跃速度为 50 r/min的实验结果。文献[40]基于零序电流和神经网络及饱和补偿,利用信号注入进行凸极追踪并在1台IM上进行了实验。文献[41]通过计算负序载波信号电流中的齿槽谐波及利用高通滤波器滤除饱和电感谐波的方法,精确地获得了标准的斜槽转子感应电机在低速空载时的转速,给出的实验结果为15 r/min。
通常,在感应电机中不只一种各向异性特性,感应电机中各向异性有着不同的空间方位,例如基波磁场的位置、转子导条极距内的导条对应位置,以及专门设计的不对称转子的位置等。当从一种特定的各向异性的响应信号中提取信息时,必然会受到其它各向异性的干扰。文献[42]分析了磁饱和在转速估计的影响,提出了消除影响的方法。据称,在零定子频率稳定运行时具有高动态性能,并给出了动态50 r/min的实验结果。文献[43]提出一种基于Hilbert变换和以内插值替换的快速傅立叶变换方案,以提高利用电流估计感应电机速度的精度。文献[44]提出了一种利用高频信号注入法对感应电机零低频运行速度进行估计的方法,该法不受磁饱和及逆变器非线性的影响,不需要离线试运转处理,但存在0.5 Hz的门槛频率。文献[45]提出了利用短时傅立叶变换分析感应电机无传感器速度信号的方法,采用插补技术提高短时傅立叶变换的精度,实验在1台ABB 2极鼠笼型感应电机上进行,获得了估计速度与实测速度良好的一致性。文献[46]提出利用离散傅立叶变换分离感应电机零速无传感器控制中不同凸极调制信号的算法。从测量的凸极信号追踪局部饱和及转子槽等引起的感应电机各向异性。
对于同步电机来说,上述各向异性自然地存在着[3],并在无传感器同步电机零速和低速驱动中获得了深入的研究。文献[47]提出了一种能在静止和运行条件下辨识出包括逆变器参数的无机械传感器IPMSM驱动系统,在启动过程中采用信号注入的方法,然后切换到基于反电动势的估计方案。文献[48]提出了一种利用永磁各向异性估计非凸极PMSM静止位置的方法。对于稀土永磁来说,注入信号最佳值为数百千Hz。文献[49]利用有限元(FE)分析法,提出了针对IPMSM的信号注入SI设计标准。文献[50]讨论了同步磁阻电机SynR的交叉饱和影响,给出了100 r/min实验结果。
Shinji Shinnaka[51]提出了一种用于凸极永磁同步电机的无传感器矢量控制方法。与常规的高频电压注入方法不同,新方法采用新颖的椭圆形的旋转高频电压,并利用新颖的锁相环方法进行检波,声称具有静止时允许250%的额定转矩;在额定负载时允许从零速到额定转速运行;甚至在零速控制中允许额定负载的突然加入;在逆变器死区,相位估计具有鲁棒性,甚至在高频定子电流过零点也能进行相位估计等特点,并给出了相关实验结果。J.Holtz[52]提出了一种基于振荡高频载波信号注入的面装式PMSM零低速无传感器控制方法,即采用特殊的检波方法消除了由脉宽调制滞后和逆变器非线性引起的估计偏差,使得没有死区补偿也能精确地工作。Nicola Bianchi[53]结合内插式PMSM,分析了基于高频信号注入的无传感器控制系统性能。具有各向异性的PMSM的转子位置可以通过向定子基频电压注入高频信号获得。相应的高频电流受转子各向异性调制,并用来估计转子位置。这种方法在零速和低速也有效。饱和与交叉耦合对转子位置正确估计具有重要影响。Gheorghe-daniel Andreescu[54]提出了一种具有宽调速范围(包括静止)的IPMSM DTC无传感器控制系统,采用PI补偿的电压电流模型的变结构的定子磁链观测器,用于低速运行;随着速度增加,观测器逐渐切换到PI补偿的闭环电压模型,用于高速情况。具有带通滤波和锁相环状态观测器的高频旋转电压注入用于估计转子位置。磁链观测与信号注入结合的宽速范围无传感器DTC控制系统。给出从低速(1 r/min)到额定转速实验结果,满负载时调速范围超过1∶1000。Chan-hee Choi[55]提出了基于高频脉振信号d,q轴交替注入的PMSM无传感器控制方案,实验证实,可以减小因零电流钳位产生的位置估计偏差和速度估计纹波。Antti Piippo[56]结合了自适应全阶观测器和低速高频信号注入,提出了一种具有逆变器输出 LC滤波器的PMSM无传感器混合观测方法,表明滤波器并不妨碍信号注入法的使用,给出了零速实验结果。
基于电机各向异性提取交流电机转速信号的方法,其技术难点在于信号处理方法。由于对特定频率进行追踪,低频谱分离和信噪比较差,信号处理可存在困难,但现代信号处理技术提供了解决这一问题的方法。Shinji Shinnaka[51]利用新颖的锁相环方法进行检波。J.Holtz[52]采用特殊的检波方法消除了由脉宽调制滞后和逆变器非线性引起的估计偏差,使得没有死区补偿也能精确地工作。文献[43]提出一种基于Hilbert变换和以内插值替换的快速傅立叶变换方案,以提高利用电流估计感应电机速度的精度。C.Wang[45]提出了利用短时傅立叶变换分析感应电机无传感器速度信号的方法,采用插补技术提高短时傅立叶变换的精度。文献[46]提出利用离散傅立叶变换分离感应电机零速无传感器控制中不同凸极调制信号的算法,从测量的凸极信号追踪局部饱和及转子槽等引起的感应电机各向异性。Damian Giaouris[57]提出在高频信号注入速度估计中利用小波变换提取和辨识转速的方法,实验和仿真结果证实了结论。
4 结论
无速度或位置传感器技术可以分为基于电机基波模型的方法和基于电机的各向异性性质的方法。基于基本模型的方法很早就已经使用了,20年前其性能即可与具有传感器的方法相媲美。目前,这种方法在极低速获得了令人振奋的结果:速度控制在3 r/min,甚至零速已经得以验证,以至于在转动惯量很高时也获得了极好的实验结果;在稳定负载下,零速稳定运行1 min以上已经得以验证。基于电机的各向异性性质的方法可以获得零速估计,但依赖于电机本身的特性,其技术难点在于信号处理方法,但现代信号处理技术提供了解决这一问题的方法。
各种方案间准确比较存在困难,原因在于至今还没有一种为大家所承认的标准的无速度传感器控制系统。回顾近期一些方案中提出的这些优秀的结论,即使是极小的进步也是有益的。
两类方案在具体的应用中需要权衡其利弊进行选择。一方面,基波励磁法具有良好的动态性能,但是不适合电动机低速运行;另一方面,高频注入法能够实现低速甚至零速时转子位置的检测,但是其动态性能有限。这两类方法的结合可以实现包括零速在内的全速范围下交流电动机的无传感器运行速度检测,其研究具有重要的理论意义和工程实用价值。
两种方法达到的共同目标在于实际工业应用具有良好的动静态性能。实用的交流电机无速度传感器控制系统要求准确度高、鲁棒性好、结构简单、价格便宜,因此,尽管现在研究工作已经取得很大的进展,实用的产品仍多采用基于基波模型的开环计算方法,只要有较好的参数辨识和必要的误差补偿,满足工艺要求的最低频率要求即可。在特殊场合,必须考虑0 Hz附近稳定运行时,各种利用电机各向异性的方法将有其美好的应用前景。
今后的研究方向是提高速度估算的精度以及对参数变化、外部扰动的鲁棒性,进一步改善电动机低速及零速的性能,这是一个难点,也是今后研究的热点。
[1]Holtz J.Sensorless Control of Induction Machines-with or Without Signal Injection?[J].IEEE Trans.Ind.Electron.,2006,53(1):7-30.
[2]Holtz J.Sensorless Control of Induction Motor Drives[C]∥Proceedings of the IEEE,2002,[S.1.]:[s.n.],2002,90(8):1359-1394
[3]Finch J W,Damian Giaouris.Controlled AC Electrical Drives[J].IEEE Trans.Ind.Electron.,2008,55(2):481-491.
[4]Abbondanti A,brennen M B.Variable Speed Induction M otor Drives Use Electronic Slip Calculator Based on Motor Voltages and Currents[J].IEEE T rans.Ind.Appl.,1975,IA-11(5):483-488.
[5]Jotten R,M aeder G.Control M ethods for Good Dynamic Performance Induction M oto r Drives Based on Current and Voltage as M easured Quantities[J].IEEE Trans.Ind.Appl.,1983,IA-19(3):356-363.
[6]Acarnley P P,Watson J F.Review of Position-sensorless Operation of Brushless Permanent-magnet Machines[J].IEEE Trans.Ind.Electron.,2006,53(2):352-362.
[7]杨耕,陈伯时.交流感应电动机无速度传感器的高动态性能控制方法综述[J].电气传动,2001,31(3):3-8.
[8]李永东,李明才.感应电机高性能无速度传感器控制系统——回顾、现状与展望[J].电气传动,2004,34(1):4-10.
[9]陈伯时,杨耕.无速度传感器高性能交流调速控制的三条思路及其发展建议[J].电气传动,2006,36(1):3-8.
[10]梁艳,李永东.无传感器永磁同步电机矢量控制系统概述[J].电气传动,2003,33(4):4-9.
[11]Schauder C.Adaptive Speed Identification for Vecto r Control of Induction M otors Without Rotational Transducers[J].IEEE Transactions on Industry A pplications,1992,28(5):1054-1061.
[12]Young S K,Sang K K.M RAS Based Sensorless Control of Permanent Magnet Synchronous Motor[C]∥IEEE.SICE 2003-42nd Annual Conference of the Society of Instrument and Control Engineers of Japan,Fukui University,Fukui,Japan,2003(2):1632-1637.
[13]Ohtani T,T akada N,Tanaka K.Vecto r Control of Induction Moto r Without Shaft Encoder[J].IEEE T rans.Ind.Appl.,1992,28(1):157-164.
[14]Rashed M,MacConnell P F A,Stronach A F,et al.Sensorless Indirect Rotor Field O rientation Speed Control of a Permanent M agnet Sy nchronous Motor with Stator-resistance Estimation[J].IEEE T rans.Ind.Electron.,2007,54(3):1664-1675.
[15]Cirrincione M,Pucci M.An M RAS-based Sensorless High Performance Induction Motor Drive with a Predictive A-daptive M odel[J].IEEE T rans.Ind.Electron.,2005,52(2):532-551.
[16]Mateusz Dybkowski,Teresa Orlowska Kowalska.Application of the Stator Current-based M RAS Speed Estimator in the Sensorless Induction Motor Drive[C]∥13th Power Electronics and M otion Control Conference(EPE-PEMC 2008),Poznań,Poland,2008:2306-2311.
[17]Armstrong G J,Atkinson D J,Acarnley P P.A Comparison of Estimation Techniques for Sensorless Vector Controlled Induction Motor Drives[C]∥International Conference on Power Electronics and Drive Systems(PEDS 1997),Singapore,1997(1):110-116.
[18]Atkinson D J,Acarnley P P,Finch J W.Observers for Induction M otor State and Parameter Estimation[J].IEEE Trans.Ind.Appl.,1991,27(6):1119-1127.
[19]Bolognani S,Tubiana L,Zigliotto M.Ex tended Kalman Filter Tuning in Sensorless PMSM Drives[J].IEEE Trans.Ind.Appl.,2003,39(6):1741-1747.
[20]Barut M,Bogosyan S,Gokasan M.Speed-senso rless Estimation for Induction M otors Using Extended Kalman Filters[J].IEEE T rans.Ind.Electron.,2007,54(1):272-280.
[21]Jang Jin-su,Park Byoung-gun,Kim Tae-sung,et al.Parallel Reduced-order Extended Kalman Filter for PMSM Senso rless Drives[C]∥The 34th Annual Conference of the IEEE Industrial Electronics Society(IECON 2008),Florida Hotel&Conference Center,Orlando,Florida,USA,2008:1326-1331.
[22]Akin B,Orguner U,Ersak A,et al.Simple Derivative-free Nonlinear State Observer for Sensorless AC Drives[J].IEEE/ASME Trans.Mechatronics,2006,11(5):634-643.
[23]Utkin V I.Sliding M ode Control Design Principles and Applications to Electric Drives[J].IEEE T rans.Ind.Electron.,1993,40(1):23-36.
[24]Barambones O,Garrido A J,M aseda F J.Integral Slidingmode Controller for Induction Motor Based on Field-oriented Control T heo ry[J].IET Control Theory Appl.,2007,1(3):786-794.
[25]Lascu C,Boldea I,Blaabjerg F.Very Low Speed Sensorless Variable Structure ControlofInduction Machine Drives Without Signal Injection[C]∥IEEE International Electric Machines and Drives Conference.(IEMDC2003),Madison,Wisconsin,USA,2003(3):1395-1401.
[26]Zaky M S,Khater M M,Yasin H.et al.Speed and Stator Resistance Identification Schemes for a Low Speed Sensorless Induction M otor Drive[C]∥12th International Middleeast Power Systems Conference(MEPCON'2008),Aswan,Egypt,2008:96-102.
[27]张兴华,牛兴林,林锦国.基于EKF的感应电机无速度传感器逆解耦控制[J].系统仿真学报,2006,18(4):982-988.
[28]Mitronikas E D,Safacas A N.An Improved Sensorless Vectorcontrol Method for an Induction Motor Drive[J].IEEE T rans.Ind.Electron.,2005,52(6):1660-1668.
[29]Cirrincione M,Pucci M,Cirrincione G,et al.An Adaptive Speed Observer Based on a New T otal Least-squares Neuron for Induction M achine Drives[J].IEEE Trans.Ind.Appl.,2006,42(1):89-104.
[30]Edelbaher G,Jezernik K,Urlep E.Low-speed Sensorless Control of Induction Machine[J].IEEE Trans.Ind.Electron.,2006,53(1):120-129.
[31]Bhattacharya T,Umanand L.Improved Flux Estimation and Stator-resistance Adaptation Scheme for Sensorless Control of Induction Motor[J].Proc.Inst.Electr.Eng.-Electric Power Appl.,2006,153(6):911-920.
[32]Vicente I,Brown M,Renfrew A,et al.Stable MRAS-based Sensorless Scheme Design Strategy for High Power Traction Drives[C]∥The 4th IET Conference on Power Electronics,Machines and Drives,2008(PEMD2008),York St.John University College,York,UK,2008:562-567.
[33]Acarnley P P,Watson J F.Review of Position-sensorless Operation of Brushless Permanent-magnet Machines[J].IEEE T rans.Ind.Electron.,2006,53(2):352-362.
[34]T erzic B,Jadric M.Design and Implementation of the Extended Kalman Filter fo r the Speed and Rotor Position Estimation of Brushless DC Motor[J].IEEE Trans.Ind.E-lectron.,2001,48(6):1065-1073.
[35]王庆龙,张崇巍,张兴.基于变结构M RAS辨识转速永磁电机矢量控制系统[J].中国电机工程学报,2007,19(22):5230-5233.
[36]Xu Z,Rahman F.An Adaptive Sliding Stator Flux Observer for a Direct-torque-controlled IPM Synchronous M otor Drive[J].IEEE T rans.Ind.Electron.,2007,54(5):2398-2406.
[37]Staines C S,Asher G M,Sumner M.Rotor-position Estimation for Induction Machines at Zero and Low Frequency Utilizing Zero-sequence Currents[J].IEEE Trans.Ind.Appl.,2006,42(1):105-112.
[38]Caruana C,Asher G M,Sumner M.Performance of HF Signal Injection Techniques for Zero-low-frequency Vector Control of Induction Machines UnderSensorless Conditions[J].IEEE Trans.Ind.Electron.,2006,53(1):225-238.
[39]Wang G,Hofmann H F,El-antably A.Speed-sensorless T orque Control of Induction Machine Based on Carrier Signal Injection and Smooth-air-gap Induction Machine Model[J].IEEE T rans.Energy Convers.,2006,21(3):699-707.
[40]Garc í a P,Briz F,Raca D,et al.Saliency-tracking-based Sensorless Control of AC Machines Using Structured Neural Networks[J].IEEE Trans.Ind.Appl.,2007,43(1):77-86.
[41]Hirofumi Kiyotake,Katsuji Shinohara,Kichiro Yamamoto,et al.Speed Sensorless Vector Control of Induction M otors Utilizing Slot Harmonics Caused by Variation of Inductance[C]∥The 4th IET Conference on Power Electronics,M achines and Drives,2008(PEMD2008),York St.John University College,York,UK,2008:722-726.
[42]Holtz J,Pan H.Elimination of Saturation Effects in Sensorless Position Controlled Induction M otors[J].IEEE T rans.Ind.Appl.,2004,40(2):623-631.
[43]Shi D,Unsworth P J,Gao R X.Sensorless Speed Measurement of Induction Motor Using Hilbert Transform and Interpolated Fast Fourier Transform[J].IEEE T rans.Instrum.Meas.,2006,55(1):290-299.
[44]Gao Q,Asher G,Sumner M.Sensorless Position and Speed Control of Induction M oto rs Using High-frequency Injection and Without Offline Precommissioning[J].IEEE Trans.Ind.Electron.,2007,54(5):2474-2781.
[45]Wang C,Zhou Z,Unsworth P J.Sensorless Speed Measurement of Induction Machines Using Short Time Fourier T ransformation[C]∥19th International Symposium on Power Electronics,Electrical Drives,Automation and M otion(SPEEDAM 2008),Ischia,Italy.2008:1114-1119.
[46]Wolbank T M,Metwally M K.Separation of Different Saliencies Modulations for Zero Speed Sensorless Control of Induction Machines Using Discrete Fourier Transform and on-line Window Length Adaptation[C]∥12th InternationalMiddle-east Power Systems Conference(MEPCON'2008),Aswan,Egypt,2008:234-238.
[47]Morimoto S,Sanada M,Takeda Y.Mechanical Sensorless Drives of IPMSM with Online Parameter Identification[J].IEEE T rans.Ind.Appl.,2006,42(5):1241-1248.
[48]Persson J,Markovic M,Perriard Y.A new Standstill Position Detection Technique for Nonsalient Permanent-magnet Synchronous Motors Using the Mag netic Anisotropy Method[J].IEEE Trans.Magn.,2007,43(2):554-560.
[49]Bianchi N,Bolognani S.Influence of Rotor Geometry of an IPM M oto r on Sensorless Control Feasibility[J].IEEE T rans.Ind.Appl.,2007,43(1):87-96.
[50]Guglielmi P,Pastorelli M,Vagati A.Cross-saturation Effects in IPM Motors and Related Impact on Sensorless Control[J].IEEE Trans.Ind.Appl.,2006,42(6):1516-1522.
[51]Shinji Shinnaka.A New Speed-varying Ellipse Voltage Injection Method for Senso rless Drive of Permanent M agnet Synchronous Motors with Pole Saliency-new PLL Method Using High-frequency Current Component Multiplied Signal[J].IEEE T rans.Ind.Appl.,2008,44(3):777-788.
[52]Holtz J.Acquisition of Position Error and Magnet Polarity for Sensorless Control of PM Synchronous Machines[J].IEEE T rans.Ind.Appl.,2008,44(4):1172-1180.
[53]Nicola Bianchi,Silverio Bolognani,Jang Ji-hoon,et al.Advantages of Inset PM Machines for Zero-speed Sensorless Position Detection[J].IEEE Trans.Ind.Appl.,2008,44(4):1190-1198.
[54]Gheorghe-daniel Andreescu,Cristian Ilie Pitic,Frede Blaabjerg,et al.Combined Flux Observer with Signal Injection Enhancement for Wide Speed Range Sensorless Direct Torque Control of IPMSM Drives[J].IEEE Trans.Energy Conversion,2008,23(2):393-402.
[55]Choi Chan-hee,Seok Jul-ki.Pulsating Signal Injectionbased Axis Switching Sensorless Control of Surface-mounted Permanent-mag net Motors for Minimal Zero-current Clamping Effects[J].IEEE T rans.Ind.2008,44(4):1741-1748.
[56]Antti Piippo,Janne Salomäki,Jorma Luomi.Signal Injection in Sensorless PMSM Drives Equipped with Inverter Output Filter[J].IEEE T rans.Ind.Appl.,2008,44(5):1741-1748.
[57]Damian Giaouris,John W Finch,Oscar C Ferreira.Wavelet Denoising for Electric Drives[J].IEEE Trans.Ind.E-lectro.,2008,55(2):543-550.
