基于改进小波变换的地物类型提取研究
2010-06-21李春静
李春静,徐 达
(1.华北水利水电学院,郑州450011;2.浙江省森林资源监测中心,杭州 310020)
小波变换可以将图像的空间特征和光谱特征进行分离,而且由于小波变换的多分辨率特性,不同尺度的空间特征也可以进行分离,同时,小波系数的幅值随着分解层数的变化,提供原始影像灰度的局部变化特性,从而为不同传感器影像融合提供了有利条件。因此小波变换可以用于多分辨率遥感影像的融合[1]。
在传统的小波变换融合中,仅仅用到了低分辨率影像经小波分解后的低频信息(图像基带数据)和高分辨率影像经小波分解后的高频信息(图像子带数据),而丢弃了低分辨率影像的高频信息和高分辨影像的低频信息。由于低分辨率影像(对应多光谱波段)的光谱信息优于高分辨率影像(对应全色波段),在理想情况下,可以认为低分辨率影像基带数据优于高分辨率影像的低频信息,因此可舍去高分辨率影像的低频信息,由于遥感影像成像过程的随机性,在影像的局部区域,可能出现高分辨率影像的低频光谱信息有可能优于低分辨率影像基带数据。因此在融合过程中,充分利用高分辨率影像的低频信息,本文基于这种思想,以SPOT5的多光谱波段和全色波段为数据源对传统小波变换做出改进,再以小波变换融合和传统融合方法图像分别作为分类底图,实施了监督分类。
1 研究区概况及数据源
研究对象为南京中山陵园风景区,地理坐标为东经 118°48′-118°53′,北纬 32°01′-32°16′,总面积3 008 hm2。主要地物类型有:针叶林、阔叶林、针阔混交林、农田、水体、竹林、乔灌、建筑用地、草坪、苗圃地等。2003年3月21日SPOT5卫星影像,4个多光谱波段空间分辨率为10 m×10 m,全色波段空间分辨率为2.5 m×2.5 m,2003年5月份中山陵航片全景图等。
2 研究方法
研究包括利用MatLab编程实现的改进小波变换融合方法,以及和ENVI软件处理的彩色空间变换融合法(HIS)、主成分变换融合法(K-L)、缨帽变换融合法(K-T)、线性加权变换融合法(L-W)进行比较分析[2-5],然后采用融合后图像作为分类底图,进行监督分类实现地物信息的提取。
2.1 改进小波变换融合
2.1.1 融合方法 融合基本方法[2]:假设有一个二维图像在分辨率j+1上的近似表示,则二维信号的有限正交小波分解公式为
相应的重建公式为:

(2)对于一幅数字图像cj+1,按式(1)分解后可形成4幅子图像cj,dj1,dj2,dj3,并且由这4幅子图像可以按式(2)合成原图像cj+1。
基本步骤如下:
①计算遥感影像的二维小波变换,设分解层数为J;
②在两幅遥感影像的小波变换域内,分别对水平、垂直与对角分量进行融合。在各尺度j(j=1~J)上将两幅影像的高频系数(对应影像各子带)进行比较,把对应位置上绝对值较大的系数作为重要小波系数保留下来,即

③对两幅影像经小波变换后的逼近系数(低频系数,对应影像基带)和进行处理,由于影像模糊表示其细节信息(或高频信息)丢失较多,相比之下,其整体信息(或低频信息)保持较好,因此两幅影像经小波分解后其逼近系数之间的差异要远远小于小波系数之间的差异,故融合后的逼近系数可由确定。
在软件MatLab的支撑下,调用其小波分析函数,编制程序实现SPOT5遥感影像的小波分解与重构,以完成基于小波变换融合法的全过程,融合效果如附图5。
2.1.2 融合方法评价 同时利用ENVI软件,进行了彩色空间变换融合法(HIS)、主成分变换融合法(K-L)、缨帽变换融合法(K-T)、线性加权变换融合法(L-W),采用均值、方差、熵、清晰度、相关系数作为评价因子进行评价[2,5],与改进小波变换融合方法(Wavelet)进行比较,结果如表1。

表1 各种融合方法评价
从表1可以看出,小波变换融合相对比其它几种融合法能最大程度地保留原多光谱影像的光谱信息,光谱退化少,改善效果较好,融合后影像也相对较清晰,是一种优良的融合方法。
2.2 基于改进小波变换的地物信息提取研究
2.2.1 研究区地物类型及训练样本选取 将研究区地物类型分为林业用地和非林业用地。林业用地又根据地面覆盖状况分为有林地、乔灌林地和苗圃地三个类型。有林地依林分组成又分为针叶林、阔叶林、针阔混交林和竹林4个类型;非林业用地分为:农田、水体、建筑用地和草坪,共11个地物类型。同时采用了种子像元扩展法和专题矢量图法相结合的基础上,再用众数滤波器对所选样本进行纯化的方法对训练样本进行了选取。
2.2.2 方法选择 本文采用监督分类方法中常用的分类器有:最小距离法、最大似然法和马氏距离法、专家分类器(决策树算法)[3]。
(1)最小距离法分类。最小距离法是利用训练样本中各类别在各波段的均值,根据各像元离训练样本平均值距离的大小来决定其类别。由训练组数据得到每一类别的均值向量,然后以均值向量作为该类在多维空间的中心位置,计算输入图像中每一个像元到各类中心的距离,最终将该像元归入到距离最小的那一类,因而在此方法中距离就是判别函数,常用的判别函数有马氏距离、欧几里德距离、计程距离等。本文应用的是马氏距离,其公式为

式中:N——波段数;Xi——像元在第i波段的像元值;¯Xij——第j种类型的地物在第i波段的灰度平均值;σi——第i波段的标准差。
(2)最大似然法分类。假设X是表示事物的状态或特征的随机变量,在这代表影像的灰度值,设wi代表事物类别的离散随机变量,对事物(比如影像所表示的地类)进行分类就可以用下列公式:

式中:P(ωi)——随机变量 ωi的先验概率,它表示事件X属于ωi预先粗略了解;P(X/ωi)——事件属于ωi类而具有X状态的条件概率;P(X/ωi)——X条件下ωi的后验概率,只要类别的先验概率及Xωi的条件概率已知,就可以得到类别的后验概率。再加上最小混淆概率和最小风险法则,就可以进行判别分类。
(3)马氏距离法。马氏距离法较适用于多波段遥感影像分类,它既考虑光谱向量的离散度,也考虑向量分布的协相关性马氏距离可按下列公式计算:

式中:∑ij——协方差矩阵;Xi,Xj——像元光谱向量和类别光谱均值向量。
(4)决策树算法。决策树算法可以像分类过程一样被定义,依据规则把遥感影像数据集往下细分以定义决策树的各个分支。决策树由一个根结点(Root nodes)、一系列内部结点(Internal nodes)(分支)及终极结点(Terminal nodes)(叶)组成,每一结点只有一个父结点和二个或多个子结点。在“原级”与“终级”之间就形成了一个分类树结构,在树结构的每一分叉结点处,可以选择不同的物质用于进一步地有效细分类,这就是决策树分类器特征选择的基本思想[4,6-7]。本研究采用分别对上述融合图像进行分类,其中,以改进小波变换融合图像为分类底图,采用决策树结合马氏距离分类效果较好,经分类后处理图像如附图6。
2.2.3 分类精度评价 分类精度主要指标有生产者精度(Producer's Accuracy)、用户精度(User's Accuracy)、总体精度(Overall Accuracy)、漏分混淆(O-mission Errors)、错分混淆(Commission Errors)和Kappa系数。混淆矩阵采用像元抽样产生,抽样时需确定抽样点数和抽样方法,并逐个确定像元的参考(实际)类别,得到各种特征影像按各分类器初步专题分类图的混淆矩阵[8-10],汇总结果见表2,基于改进小波变换融合影像的马氏距离法(结合决策树算法)分类精度评价混淆矩阵见表3。
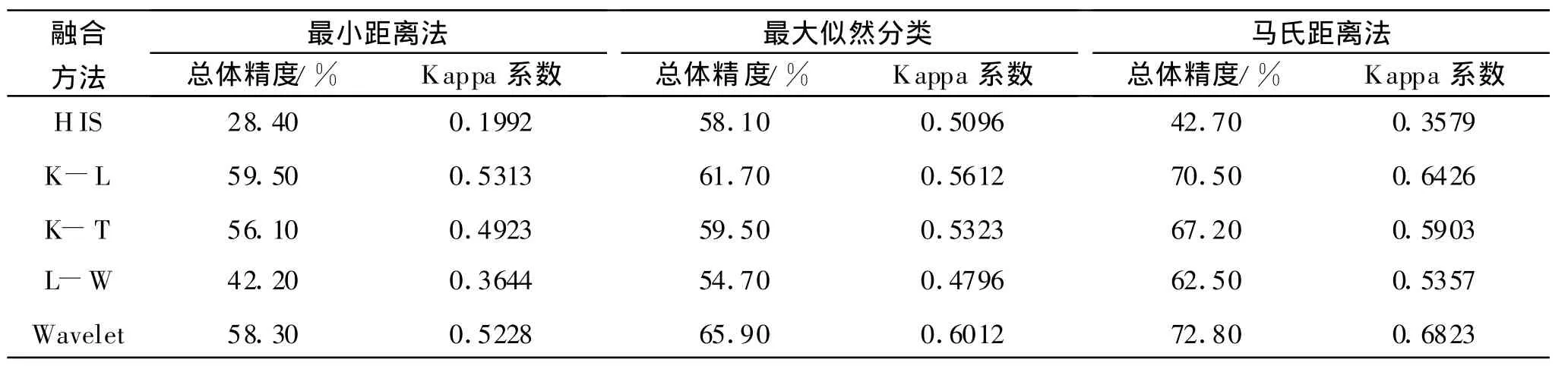
表2 基于分类融合方法的分类精度评价
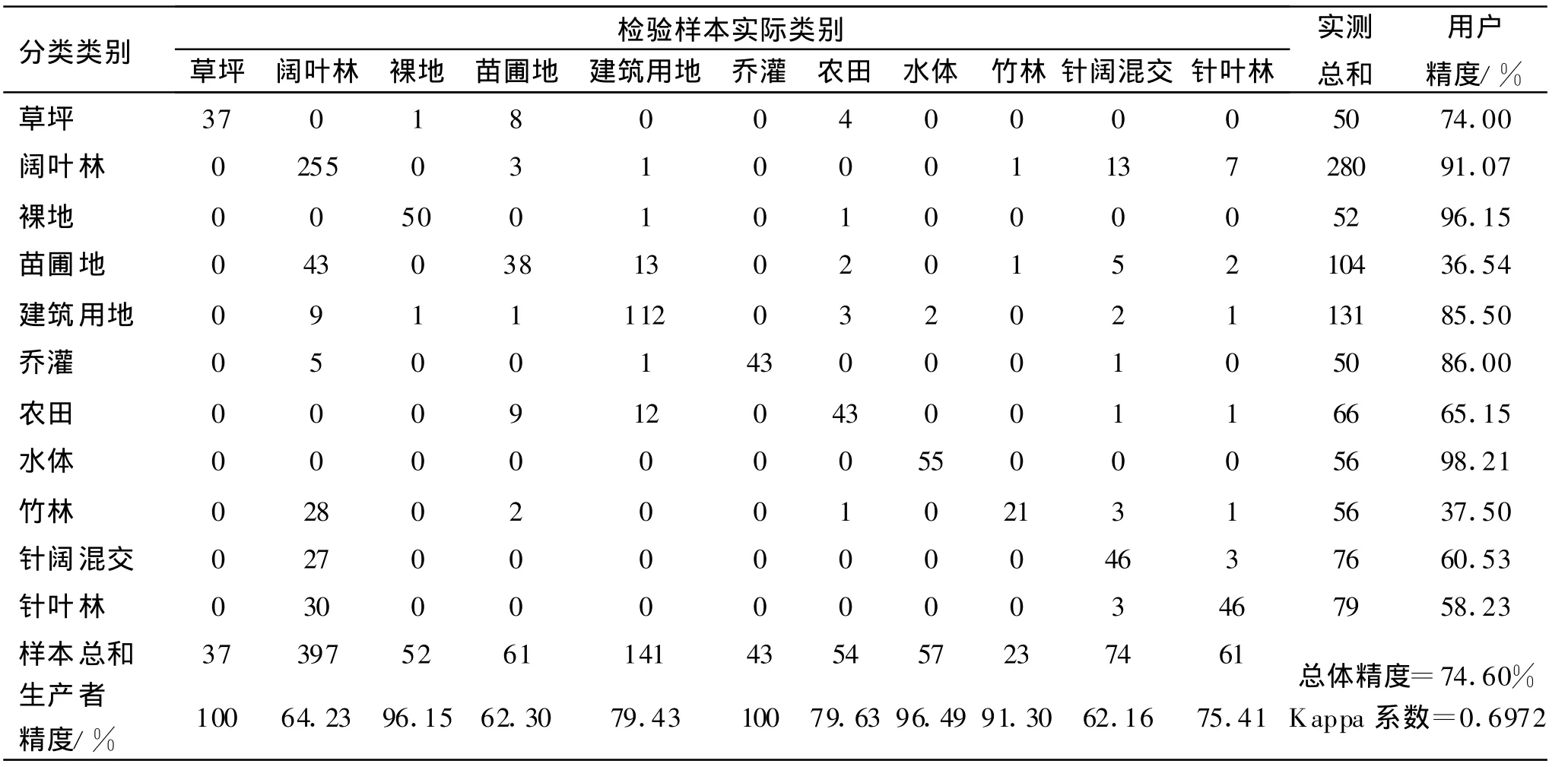
表3 基于小波变换融合影像的马氏距离法(结合决策树算法)分类精度评价混淆矩阵
3 结论
利用传统融合及分类方法,对研究区森林类型进行计算机分类,总体精度普遍不高,最高的总体精度才达到70%多,且许多森林地类或林分类型的生产者精度和用户精度均比较低,这说明分类中存在严重的漏分和错分现象。如山体后阴影易错分为水体,苗圃地与草坪间存在着混分现象,建筑用地(道路、名胜古迹等)分布复杂,也容易影响其它类型的分类,阔叶林与苗圃地间也出现严重的混分现象,尤其是阔叶林、针阔混交林间存在的问题更甚。小波变换融合影像的分类精度比基于其他特征影像的分类精度要高。其中基于小波变换融合影像,采用马氏距离分类器的分类精度较高,总体精度达到了72.80%,Kappa系数为0.682 3。
利用小波变换融合为基础的马氏距离法和决策树算法相结合的分类结果表明,分类的总体精度和Kappa系数都有所提高,分别达到了74.60%和0.697 2。由于尝试了先对遥感影像中水体和苗圃地的提取,减少了这两类与其它地物类型的混分现象,使各自类别的生产者精度和用户精度也有所提高。
[1]李军,周月琴,李德仁.小波变换用于高分辨率全色影像与多光谱影像的融合研究[J].遥感学报,1999,3(2):116-121.
[2]汤国安,张友顺,刘咏梅,等.遥感数字图像处理[M].北京:科学出版社,2004.
[3]孙家炳,舒宁,关泽群.遥感原理、方法和应用[M].北京:测绘出版社,1997.
[4]梅安新,彭望琭,秦其明,等.遥感导论[M].北京:高等教育出版社,2001.
[5]Wald L.A Conceptual Approach to the Fusion of Earth Observation Data[J].Survey in Geophysics,2000,21:177-186.
[6]冉启文.小波变换与分数傅里叶变换理论及应用[M].哈尔滨:哈尔滨工业大学出版社,2001.
[7]贾永红,李德仁.多源遥感影像像素级融合分类与决策级分类融合法的研究[J].武汉大学学报:信息科学版,2001,26(5):430-434.
[8]Foody G M,Lucas R M,Curran P J.Mapping Tropical Forest Fractional Cover from Coarse Spatial Resolution Remote Sensing Imagery[J].Plant Ecology,1997,131:143-153.
[9]潘建平,叶焕倬.基于遥感分类的植被覆盖度提取[J].测绘信息与工程,2007,32(6):17-19.
[10]闫业超,张树文,岳书平.克拜东部黑土区侵蚀沟遥感分类与空间格局分析[J].地理科学,2007,27(2):193-199.
