一种光电编码器抗振动测速的方法
2010-06-21李汉
李汉
(广州航海高等专科学校 轮机系,广东 广州 510725)
1 引言
光电编码器在工业测速有较为广泛的应用,光电编码器的应用技术不断产生。文献[1]采用恒基准脉冲法提高光电编码器测速的精度,文献[2]采用锁相环技术提高低速响应速度,但这些方法都以光电编码器输出正交无干扰信号为前提,当测速系统处于较大振动的情况下是无能为力的。在振动较大的情况下,文献[3,4]分析了振动对光电编码器测速的影响并设计了抗干扰防振动电子线路。本文将介绍一种基于ARM7嵌入式系统的光电编码器抗振动测速和判向的方法及其应用效果。
2 振动对编码器输出信号的影响
目前使用光电编码器测速的方法有M法、T法和M/T法。M法测量一定周期内的脉冲数,T法测量脉冲的周期值,M/T法测量一定周期内的整数个输入脉冲的时间值。这3种方法中应用较为广泛的是M/T法,因为M/T法能在短时间内高精度检出所测之速,且分辨率与转速无关。但要求编码器输出的脉冲是无干扰的脉冲信号,一旦出现干扰,测量的精确度将大大降低。
在控制系统中,当转速较高时,电机运行比较平稳,振动小,采用光电编码器测速准确度较高。但电机转速较低时,振动对光电编码器的影响较为明显,如果不加处理,测速结果将失去实际使用的价值。为了弄清振动对光电编码器输出信号的影响,我们使用步进电机作为驱动进行实验,研究振动对光电编码器测速的影响,原因是:1)步进电机的转速与驱动脉冲频率有关,与负载无关,有利于获得准确的给定转速;2)步进电机的调速范围较宽;3)当转速低于某一转速时,步进电机每走一步转子都会产生震荡,借此研究振动对光电编码器测速性能的影响。经过监测表明,传动轴转动平稳、无振动时,光电编码器输出波形为 A,B两相正交波形,如图1a所示。这时使用M/T法测速的精度较高。当传动轴出现振动时,振动对光电编码器输出信号的影响如下。
1)光电编码器输出波形在 A相或B相的前沿或后沿出现N个干扰脉冲,如图1b所示。这时如果仍然使用非抗振动的测速方法,测量结果将具有较大的误差,且不稳定,导致数据无法使用。
2)干扰脉冲的出现具有随机性。干扰脉冲可能在脉冲前沿出现,也可能在后沿出现;可能出现1个或若干个,也可能不出现,给准确测速带来一定的困难。经过大量的观测,一般情况下 N=0~3。
3)光电编码器A,B相输出信号的正交性被破坏,无法使用正交性判断转向,如果仍然使用这种转向判断方法,将出现测向不稳的现象,即正转和反转指示灯不断闪烁,无法确定转向。

图1 光电编码器输出波形图Fig.1 Output waveforms of optical encoder
3 光电编码器抗振动测速方法
传动轴振动时,光电编码器输出信号出现干扰脉冲,使测速脉冲计数不准确,同时破坏A,B相信号的正交性,造成判向错误。如果对测速方法不加以改进,则大大限制光电编码器的用途。对于在传动轴振动的情况下提高光电编码器测速精度,关键是能够对A,B相的输出脉冲去伪存真,分辨出哪个脉冲是干扰的,哪个脉冲是真实的。
假设光电编码器输出 A,B两相信号,以 A相信号为测速脉冲信号,B相信号为参考信号。由图1a可看出,当A相信号的上升沿时刻测得B相信号的电位与A相信号的下降沿时刻测得B相信号的电位不同时,此次脉冲为真实脉冲,反之脉冲为干扰脉冲。甄别编码器输出脉冲真实性具体如下:在A相信号的上升沿时刻测量B相信号的电位Vu,下降沿时刻测量B相信号的电位Vd,则:当Vu≠Vd时,判定本次脉冲为真实脉冲;当Vu=Vd时,判定本次脉冲为干扰脉冲。
在测速程序中对真实脉冲,将给以计数,忽略干扰脉冲,这样在传动轴出现振动的情况下使用光电编码器测速的精度将大大提高。
采用如图2所示的实验线路来验证我们的观点。图2中采用ARM7单片机LPC2114,光电编码器 A,B相信号分别由P0.10,P0.11输入到LPC2114,测速的结果通过 I2C接口电路ZLG7290驱动数码管显示出来。P0.10设置为CAP1.0,P0.11设置为GPIO。应用PLC2114内部定时器TIMER1捕获和匹配功能可完成测速的要求。定时器 TIMER1设置为CAP1.0上升沿、下降沿捕获并产生中断;T1MR0匹配中断并复位,用于产生周期为0.1 s的测速周期。在定时器TIMER1的中断程序中处理测速计数和定时。
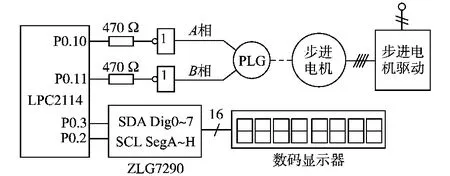
图2 光电编码器抗振动测速线路图Fig.2 Circuit diagram of vibration proof speed measurement
3.1 抗振动M/T测量方法
设定测速周期为 Tc,测速系统运行后,编码器不断发出A,B相脉冲信号。系统接收到脉冲之后,必须甄别出 A相的干扰脉冲,从而决定是否对脉冲进行计数或作为计时开始/结束时刻。测速系统从A相信号真实脉冲的下降沿开始计时,在Tc期间对A相信号不断判定输入脉冲的真实性,如果输入为真实脉冲,则测速计数器m加1,如果输入为干扰脉冲,则测速计数器保持原值不变,直到计时≥Tc,同时真实脉冲下降沿来临时刻,记录测速计数器的脉冲数m、实际计时脉冲数Tn,由此计算出转速n。假设计时时钟频率为fc(MHz),则

式中:n为所测转速,r/min;P为编码器每转脉冲数,P=500;fc=1.105 92 MHz;Crmp=60×106fc/P=132 710.4 r/min。
抗振动测速方法对光电编码器的输出信号辨别真实脉冲和干扰脉冲,使测速结果的精度在一定条件下大为提高,使光电编码器应用进入低速有振动的传动控制领域。
3.2 判断转向
由于干扰脉冲的出现,破坏了光电编码器A,B相输出信号的正交性,从而使正交性判断转向的方法无法使用,应寻求新的方法。在传动轴有振动的情况下,为了较为准确地判定转向,本文采用如下的方法:设置判向计数器Dr,在A相信号脉冲为真实脉冲的下降沿时刻,测量B相信号的电位Vd,当Vd=“1”时 ,Dr加1,当Vd=“0”时,Dr减1,在一个测速周期Tc内Dr>0,则判为正转;Dr<0,则判为反转。
判向计数器Dr必须在测速周期开始时清零。这种判向方法的好处是在一个测速周期内记录A相信号超前于B相信号的脉冲次数来判断转向,不会因为几次干扰造成判向失误,所以抗振动的性能较好。
4 实验结果
实验条件:步进电机42BYGH023,步进电机驱动器DL-022M-I,光电编码器OSS-05-2C。步进电机的步距角为1.8°,驱动器10倍细分,电机空载,测速周期0.1 s。实验结果如表1所示。
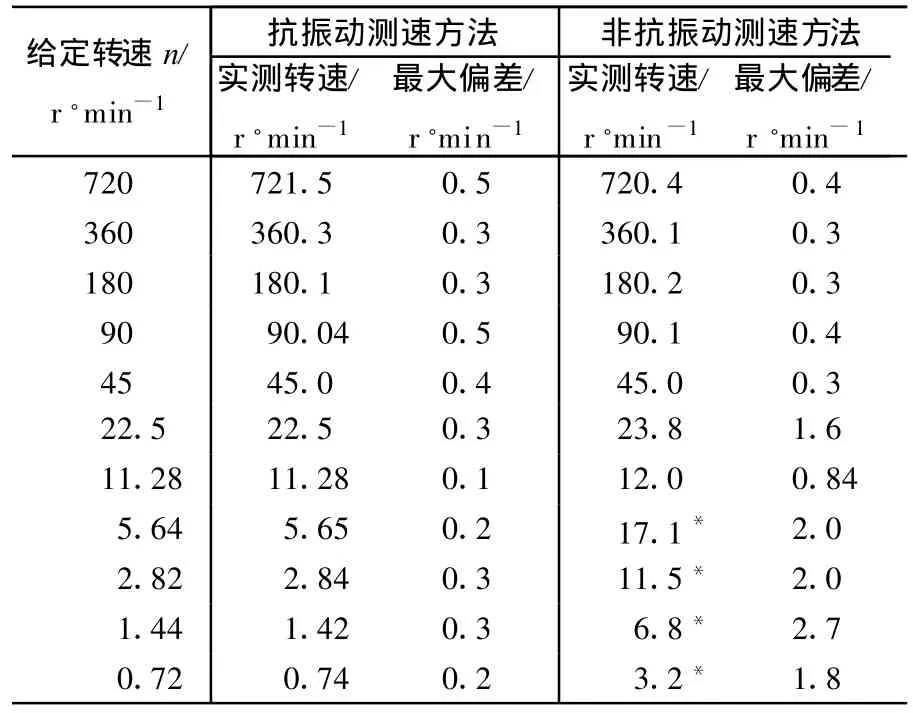
表1 抗振动和非抗振动测速方法实验结果对比Tab.1 Comparison between the results of vibration-proof speed measurement and that of the non-vibration-proof one
实验结果分析如下:
1)步进电机平稳运行的速段(n≥45 r/min),2种方法测量结果基本相同;
2)转子振动较大的速段(0.72 r/min≤n≤5.64 r/min),采用抗振动方法的测速结果比较准确,而非抗振动方法的测速结果严重偏离给定转速;
3)在整个转速给定范围内(0.72 r/min≤n≤720 r/min)采用抗振动方法皆能正确测向;而出现较大振动的转速范围(0.72 r/min≤n≤5.64 r/min),非抗振动方法无法测出正确的转向。
步进电机给定转速小于45 r/min时,步进电机转子振动,采用非抗振动方法测量的结果开始偏离给定转速,随着给定转速减低,振动愈加严重,从而非抗振动方法测量的结果愈加偏离给定转速,最大达3倍之多。由此可见传动轴振动对光电编码器测速精度影响之大,如果不采取措施,光电编码器将无法使用于低速有振动的情况。可见本文所采用的抗振动测速方法是有效的,与非抗振动测速方法相比,其测速范围相比大些,其精度要高些。
本文介绍的抗振动测速方法的优点是方法简单易行,即无需复杂的硬件电路,也不需要复杂和耗时的数学运算,仅在测速程序中增加一段甄别干扰脉冲的代码即可。但由于甄别光电编码器干扰脉冲的方法较为简单,故传动轴扭振振幅比较小时此方法是有效的,要求
式中:Vm为振幅;Y为光电编码器的槽距。
超过这一要求,将无法甄别干扰脉冲,从而不能对编码器输出的脉冲进行准确计数,导致较大的测速误差。
5 结论
本文在观测传动轴振动对光电编码器输出信号影响的基础上,提出一种简单易行的甄别光电编码器干扰脉冲的方法。结合M/T测速方法,形成基于光电编码器的抗振动测速和判向的方法,并采用步进电机为驱动的实验系统进行测试。结果表明,本文所采用的抗振动测速方法在传动轴扭振振幅不大的条件下是有效的,与非抗振动测速方法相比,不仅扩大了光电编码器的测速范围,而且测速的精度要高些,因此本文介绍的抗振动测速和判向的方法具有较好的实用价值。
[1]宋刚,秦月霞,张凯,等.基于普通编码器的高精度测速方法[J].上海交通大学学报,2002,36(8):1169-1172.
[2]汪涛,黄声华,万山明.一种基于DSP的伺服电动机转速检测方法[J].微电机,2006,39(3):86-88.
[3]崔晓红,陈宏利.光电编码器抗干扰防振动电路的设计[J].交通与计算机,2005,23(1):110-112.
[4]刘新建,李迅,张彭.光电编码器的减振计数电路设计[J].自动化仪表,1999,1(1):39-40.
