金鸡滩水利枢纽电站清污机设计
2010-06-12叶晓青
叶晓青
(广西南宁水利电力设计院 南宁 530001)
1 基本概况
1.1 工程简介
广西隆安金鸡滩水利枢纽电站位于右江中下游河段,距隆安县城8km。发电厂房布置在左河道船闸和溢流闸坝之间,厂内安装 3台单机容量24MW的贯流式机组,进水口按单机单孔布置。每台机组的进水口设一扇拦污栅,拦污栅后设有检修门,拦污栅和检修门的启闭由坝顶门机操作。工程于2006年3月第一台机组发电,2007年3月全部建成投产。
电站建设期间,由于缺乏相关资料,且清污设备的应用还不很普遍,缺少运行应用经验,因而没有进行清污机设备招标采购。由于发电厂房前沿没有设置拦污设施,发电机组进水口没有设置清污设备,电站投产运行以来,河中大量的竹木枝条、树干、秸杆、编织袋等杂物随水流堆积在拦污栅前,半沉浮污物吸附在拦污栅上,造成拦污栅堵塞,发电水头损失严重,影响电站发电出力。电站只能采用提栅人工清污的方式进行清污,不仅工程量大,周期长,且必须停机才能进行。为了有效地清除栅前污物,提高水头利用率,发电机组进水口有必要增设拦污栅清污设备。
1.2 现有相关设备特性
本次进行清污机设计,需充分考虑清污机与现有设备 (拦污栅、坝顶门机)的配套联系和影响,了解现有设备的相关特性参数,以保证清污设备安全运行。现有与清污机有关设备包括厂房进水口拦污栅、坝顶门机,设备相关特性见表1、表2。
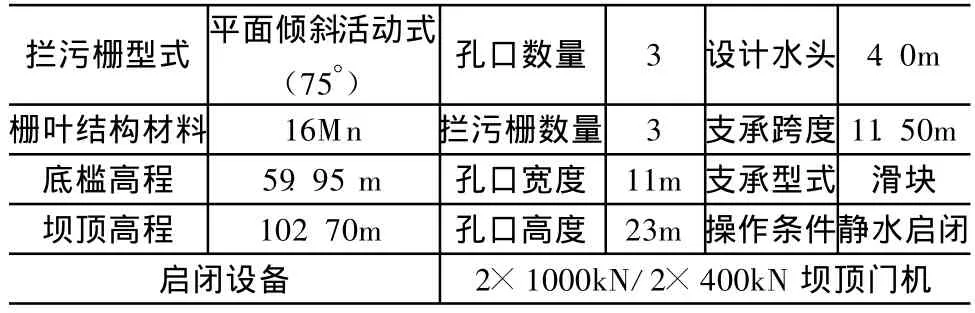
表1 11×23-4.0m厂房进水口拦污栅主要特性表
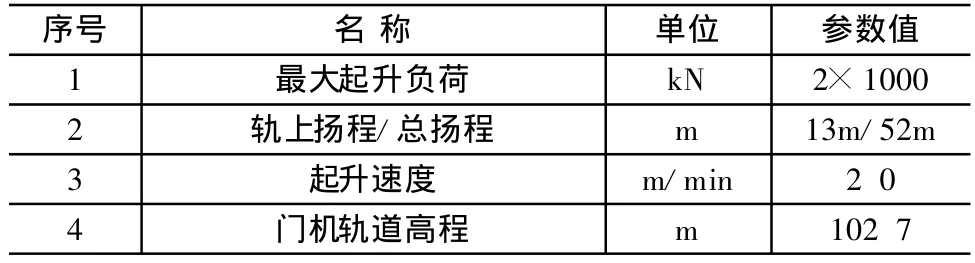
表2 2×1000kN/2×400kN坝顶门机主要技术参数表
1.3 现有相关土建结构说明
发电厂房进水口坝顶平面主要布置有拦污栅槽、检修门槽、坝顶门机轨道梁、清污机轨道梁以及孔口周边栏杆等设施。坝顶门机梁的截面宽0.6m,高2.2m,跨度长11m,设计最大工作轮压为540kN,梁间距(轨距)12m,坝顶门机已经安装运行;清污机轨道梁的截面宽0.3m,高1.3m,设计最大工作轮压为86kN,梁间距(轨距)4m。电站建设期间,因清污设备未进行招标及选型,故清污机轨道的相关埋件没有预埋。
2 清污机设计
2.1 设计要求
本次进行拦污栅清污机的设计是在电站建成投产后进行的,因此清污机的设计要充分利用已有设备,尽量减少对原有设备的改造,不对已有土建结构造成破坏,同时要做到技术先进,质量可靠,结构简单、实用,造价合理,安装调试和运行维护方便。
2.2 清污机方案比较
根据电站运行清污要求,并结合电站现有设备和厂房段坝顶平面布置情况,进行清污机方案设计。经过多次反复论证比较和实地考察,并借鉴已建项目的成功经验,拟定了三个清污机设计方案,分别简述如下。
全跨式液压抓斗清污机主要由清污抓斗、起升机构和电气装置组成,与坝顶门机配套使用。一套清污结构总重约43t。
清污抓斗:清污抓斗为全跨液压抓斗,抓斗开闭由液压缸进行控制,斗宽10.9m,容量8.0m3。
起升机构:清污机的起升机构采用固定卷扬机带动抓斗进行升降,起升机构支架支撑在孔口两侧的闸墩上。
行走机构:利用坝顶门机作为清污机行走机构,即清污机的定位、卸污由坝顶门机通过起吊、运输清污抓斗完成。
电气系统:包括传动、控制和电气保护等系统,主要是起升机构、抓斗开闭等的运行控制。
工作原理:通过坝顶门机移动(运输)清污机到指定孔口位置,清污时,抓斗的转耙张开并沿拦污栅胸墙下降,当清污抓斗到达拦污栅斜面位置时,越过斜面沿拦污栅栅条运行,并铲下拦污栅前的污物,到达拦污栅底部后,开闭机构收回,抓斗的转耙闭合后,可抓取铲齿铲下的污物,抓斗提升,坝顶门机起吊清污机,移动(运输)到指定位置进行卸污。一次运行即可完成对一孔拦污栅清污。
采集病料带回实验室后,进行细菌学检查,常规方法进行涂片镜检,未发现被阴性或阳性染色的致病菌。将病料粉碎后,划线接种到几种常见的培养基上,恒温箱内培养48 h,温度控制在37 ℃,在几种常见培养基上均没有出现致病菌生长。
对已有拦污栅改造要求:由于清污抓斗自重大,导向轮对栅条的轮压为39.6kN。经过验算,原有拦污栅栅条的强度和稳定不能满足要求,需进行加固改造,同时每孔拦污栅顶增加1节导向拦污栅,共3节,导向拦污栅总重33t(3×11t)。
对已有土建结构的改造要求:清污机直接支撑在闸墩上,清污机工作过程中产生的压力由闸墩承受,闸墩结构满足受力要求,对已有土建结构没有影响。
主要优缺点:优点是一次运行即可完成对一孔拦污栅清污,清污效率高。缺点是自重大,需对原有拦污栅进行加固改造,费用较高。
(2)台车式(门架式)耙斗清污机
台车式(门架式)清污机主要由清污抓斗、起升机构、行走机构和电气装置等组成。一套清污结构总重约40t,轨道重3.8t。
清污抓斗:清污抓斗为液压抓斗,抓斗开闭由液压缸进行控制,斗宽2.5m,容量1.0m3
起升机构:由起升构架、电动机、起升制动装置等组成,清污机的起升机构带动抓斗进行升降。
行走机构:大车运行机构为台车式(或门架式)构架,采用全封闭分别驱动,主动行走轮共有4个车轮,其中2个主动轮,2个从动轮。轨距4.0m,轮距3.0m,最大工作轮压182kN。
电气系统:包括传动、控制和电气保护等系统,主要是对行走机构、起升机构、抓斗开闭等的运行控制。
工作原理:通过启动行走机构(大车)移动清污机到指定位置,清污时,抓斗的转耙张开并沿拦污栅胸墙下降,当清污抓斗到达拦污栅斜面位置时,越过斜面沿拦污栅栅条运行,并铲下拦污栅前的污物,到达拦污栅底部后,抓斗的转耙闭合后,可抓取铲齿铲下的污物,抓斗提升至坝顶,大车移动清污机到指定位置卸污。
对已有拦污栅改造要求:由于清污抓斗自重轻,导向轮对栅条的轮压为19.3kN。经验算,原有拦污栅栅条的强度和稳定满足要求。每孔拦污栅顶增加1节导向拦污栅,共3节,导向拦污栅总重33t(3×11t)。
对已有土建结构的改造要求:①为了铺设行走台车(门架)的行走轨道,要对原有清污机轨道梁进行钻孔埋设轨道埋件,势必对轨道梁造成影响,强度削弱。②原轨道梁设计最大轮压为86kN,新的清污设备设计最大轮压为182kN,经验算,原轨道梁(设计最大轮压为86kN)不能满足要求,须对轨道梁进行相应的加固处理,难度大,增加投资。
主要优缺点:优点是运行灵活、独立性强,操作简便。缺点是结构复杂,增加大车行走机构和走行轨道,对原土建结构影响大;对1孔清污需重复运行3~4次才能完成,每次清污均要将清污机开到指定的地点卸污,需要二次装卸才能把污物运走,清污效率低;制造安装费用高。
(3)悬挂式清污机
该清污机由起升机构、液压清污抓斗、支架、电气装置等组成,与坝顶门机配套使用。一套清污结构总重约25t。
清污抓斗:清污抓斗为液压抓斗,抓斗开闭由液压缸进行控制,斗宽3.0m,容量2m3。
起升机构:清污机的起升机构主要由支架和固定卷扬机组成,支架支撑在上游门机梁和有清污机轨道梁,采用固定卷扬机带动抓斗进行升降。
行走机构:利用坝顶门机作为清污机行走机构,即清污机的定位、卸污由坝顶门机通过起吊、运输清污机完成。
电气系统:包括传动、控制和电气保护等系统,主要是起升机构、抓斗开闭等的运行控制。清污机的电气控制和操作元件均布置在一个控制箱内,该控制箱可以放置在门机司机室内。
工作原理:清污机与坝顶门机配套使用。当清污机需要工作时,通过门机移动将清污机运行到指定的清污工位,操作门机起升机构使清污机固定放置在孔口上,然后进行清污,清污过程通过清污机自己的控制系统进行操作。清污机的起升机构带动抓斗进行升降,通过液压系统操作液压缸推动耙斗进行开闭。清污时,抓斗的转耙张开并沿拦污栅胸墙下降,当清污抓斗到达拦污栅斜面位置时,越过斜面沿拦污栅栅条运行,并铲下拦污栅前的污物,并沿栅面下行,当清污抓斗抓满时或到达拦污栅底部后,液压系统工作使抓斗的转耙闭合后,可抓取铲齿铲下的污物,抓斗提升至上极限。操作门机起升机构把抓斗提升至坝面上,移动门机到指定卸污位置,抓斗张开卸污。一个工位清污完毕后,由门机的带动清污机到下一个清污工位按上述进行重复作业。对1孔清污需重复运行3~4次即可完成。
对已有拦污栅改造要求:由于清污抓斗自重轻,导向轮对栅条的轮压为19.3kN。经验算,原有拦污栅栅条的强度和稳定满足要求。每孔拦污栅顶增加1节导向拦污栅,共3节,导向拦污栅总重33t(3×11t)。
对已有土建结构的改造要求:清污机支架支撑在门机轨道梁上,下游侧支撑在原清污机轨道梁上。清污机工作过程中,对上游侧门机轨道梁产生的最大压力为120kN(门机轨道梁最大工作轮压力为540kN),对下游侧清污机轨道梁产生的最大压力为80kN(清污机轨道梁最大工作轮压力为86kN),原有土建结构满足要求,对已有土建结构没有影响。
主要优缺点:优点是充分利用坝顶门机纵向移动速度快和卷扬机升降速度快的特点,完成一次清污所用时间较短,提高清污效率;结构简单,操作简便;制作、安装费用低。缺点是对1孔拦污栅清污需要重复3~4次才能完成。
2.3 清污机方案选择
综上所述,悬挂式清污机方案具有结构简单,操作简便,清污效率高,投资省等优点,因此,金鸡滩水利枢纽电站进水口清污设备采用悬挂式清污机方案。见图1、图2:
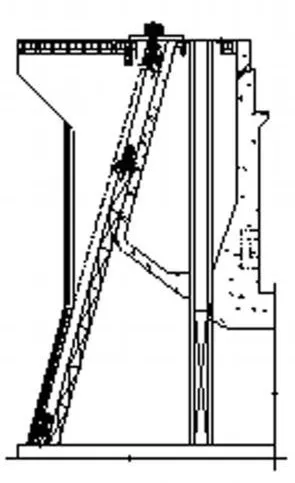
图1 清污机运行位置示意图
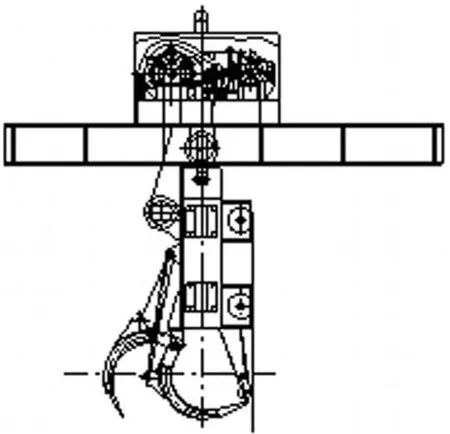
图2 悬挂式清污机示意图
3 现有设备配套改造
3.1 拦污栅的改造
现有拦污栅设计为斜式布置,倾斜角度为75°,拦污栅顶部与胸墙形成的角度较缓,清污抓斗不能越过栅顶。为了保证清污抓斗能顺利通过拦污栅顶到达栅面进行清污,需要在拦污栅顶部设置1节拦污栅导向架。导向架结构结合现有拦污栅进行设计,充分考虑现有拦污栅、启闭设备的配套联系,并能满足清污抓斗的安全运行要求。导向架拦污栅条与现有拦污栅条结构相同,上下栅条对齐,栅面为同一平面,启吊操作采用原拦污栅抓梁和坝顶门机。导向架与原拦污栅衔接详见图3。
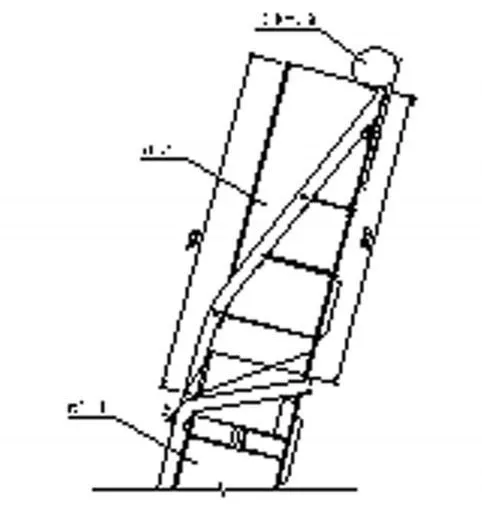
图3 导向架与原拦污栅衔接示意图
3.2 配套启闭设备改造
采用悬挂式清污机进行清污,需要坝顶门机配套使用。可以采用在现有拦污栅抓梁上焊接清污机吊耳,配套吊轴的方法或增加一根简易平衡梁,达到起吊运输清污机目的。考虑使用方便和不影响原有设备,本工程采用增加平衡梁。
4 小结
清污机经过近一年的投运,清污力强、效率高。在实际运行中,能抓捞起竹木枝条、树干等较大较重的异物,即使在机组带满负荷水流最湍急的工况,清污机都能下到栅底槛抓捞垃圾,证明清污机疏水性能好,既能减小水压力,又能有效地抓装垃圾。门机作为行走机构,移动速度快,定位准;卷扬机起升速度快,完成一次清污时间仅需20min,清污效率高。
清污机在电厂运行中担负着清理污物,疏通拦污栅,保证机组正常运行的重任,特别是在安装灯泡贯流式机组的电厂更能表现出清污机的重要性。悬挂式清污机方案的设计结合金鸡滩水利枢纽电站的实际情况,技术先进,符合电厂运行要求,减少清污成本,增加发电量,给电厂带来更高的效益。
